本文主要是介绍机器人导纳控制实现框架,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
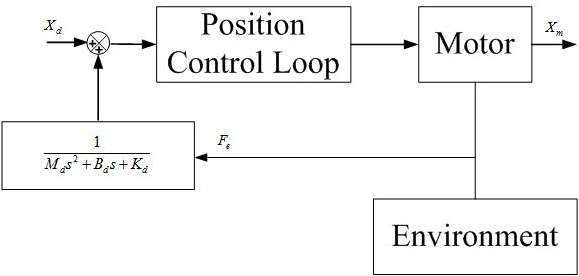
Safe, Stable and Intuitive Control for Physical Human-Robot Interaction - 知乎关于文章《Safe, Stable and Intuitive Control for Physical Human-Robot Interactio》的简记。 Safe, Stable and Intuitive Control for Physical Human-Robot Interaction目的根据力导数作为预测人类意图的一种…![]() https://zhuanlan.zhihu.com/p/653067046
https://zhuanlan.zhihu.com/p/653067046
这篇关于机器人导纳控制实现框架的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







