本文主要是介绍拟合工具箱cftool,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 1.读入数据方式:
- 1.1cftool函数
- 1.2cftool中选择
- 2.选择函数:
- 3.保存图像:
- 4.通过函数求解拟合后的值:
- 小结:
1.读入数据方式:
1.1cftool函数
把两个矩阵放入即可
例如:
[num]=xlsread('D:\系统默认\桌面\数据可视化作业\1 课设\土地利用情况.xlsx', 2)
y_col = 8 % 输入y对应的列x = num(:, 1)
y = num(:, y_col)cftool(x,y)
结果:

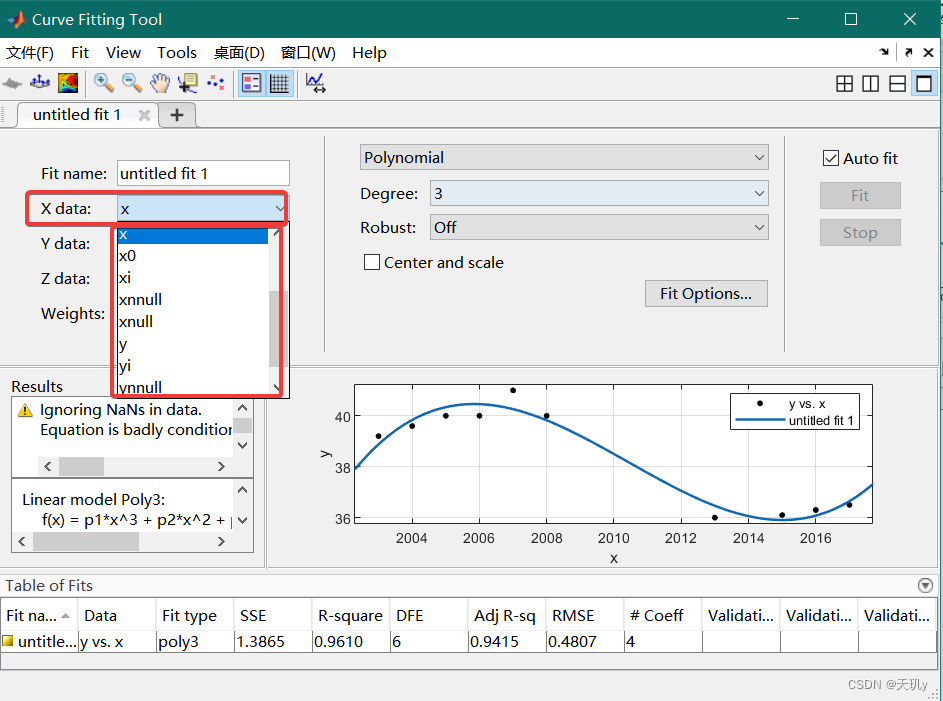
1.2cftool中选择
这些能选到的都是之前定义过的
2.选择函数:
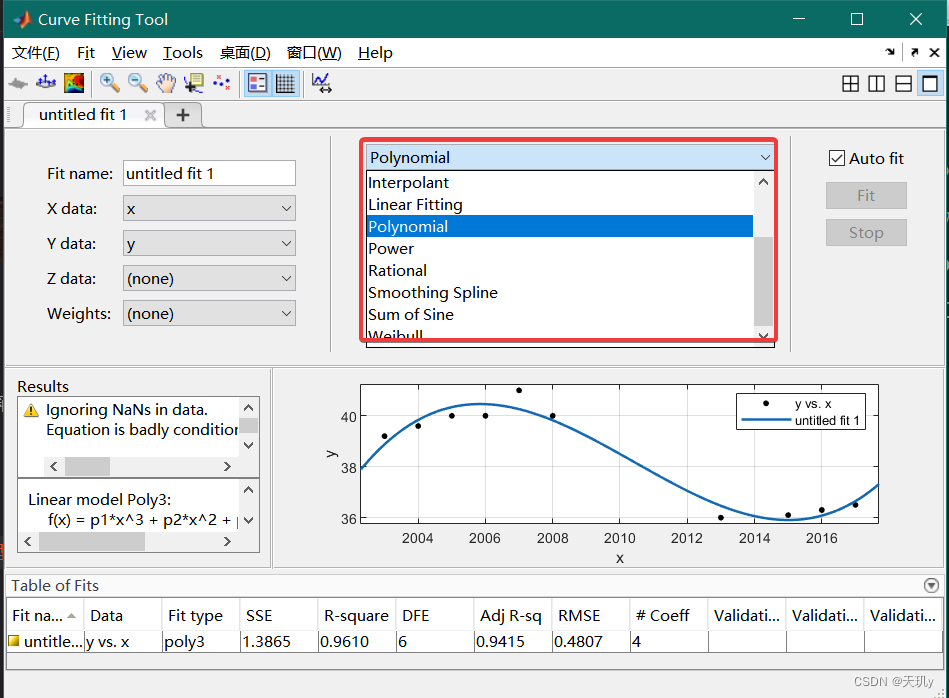
工具箱提供的拟合类型有:(参考的其他博主文章)
- Custom Equations:用户自定义的函数类型;
- Exponential:指数逼近;
- Fourier:傅立叶逼近,有7种类型;
- Gaussian:高斯逼近,有8种类型;
- Interpolant:插值逼近,有4种类型;
- Linear Fitting:线性拟合;
- Polynomial:多项式逼近;
- Power:幂逼近,有2种类型;
- Rational:有理数逼近;
- Smoothing Spline:平滑逼近;
- Sum of Sin Functions:正弦曲线逼近,有8种类型;
- Weibull:只有一种,a ∗ b ∗ x ( b − 1 ) ∗ e x p ( − a ∗ x b ) abx(b-1)*exp(-a*xb)a∗b∗x ( b−1)∗exp(−a∗x b );
原文链接
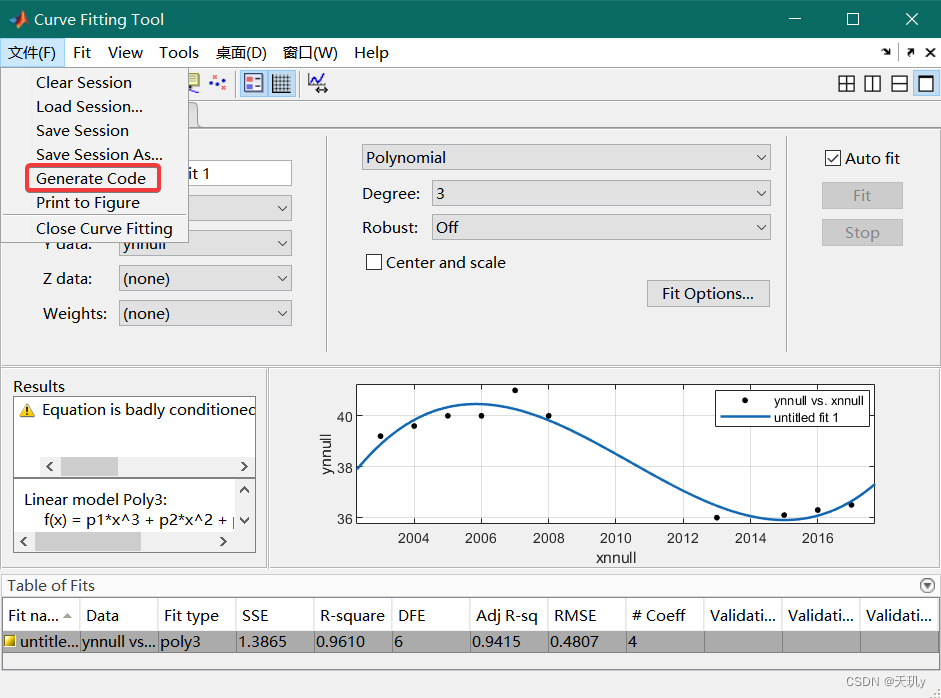
拟合模型、参数、拟合效果
拟合效果:
- SSE(和方差):拟合误差平方和,接近0,表示与数据拟合的好,但是要小心过拟合;
- R-Square(确定系数):实测数据与推理数据之间的相关系数平方值,趋近于1较好;
- RMSE(均方差):预测数据和原始数据对应点误差的平方和的均值,也就是SSE/n;
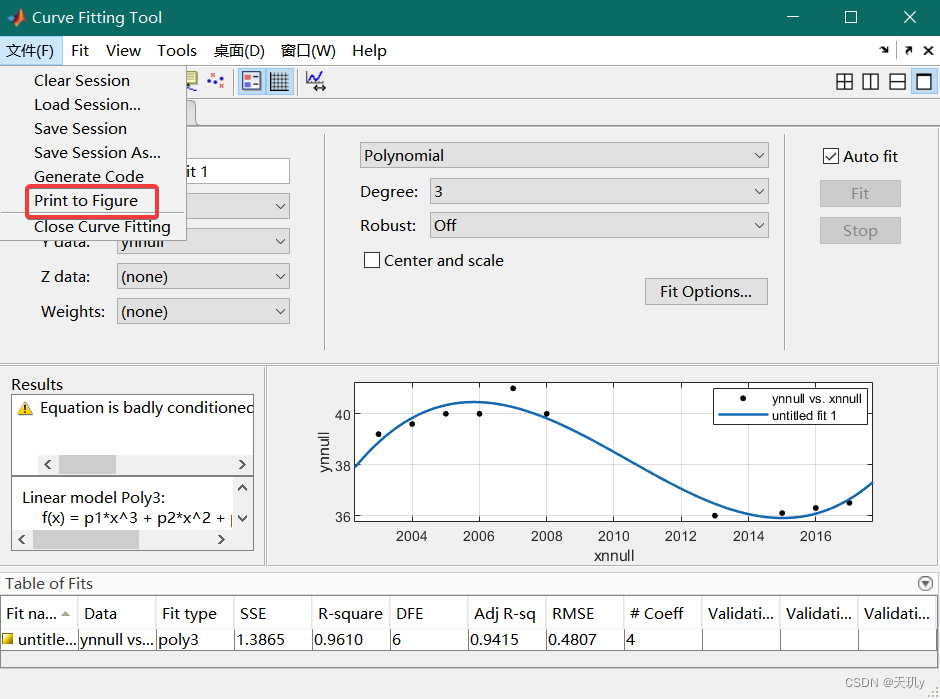
3.保存图像:
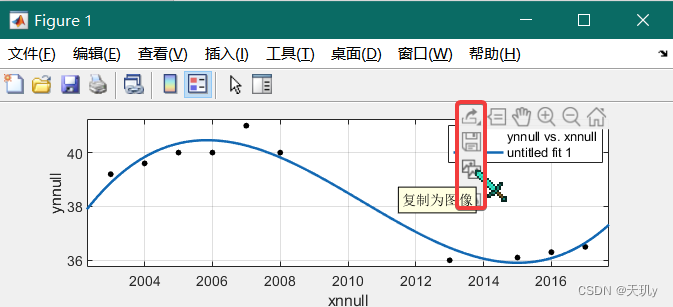
4.通过函数求解拟合后的值:
点击生成代码
获得函数代码如下,将其保存
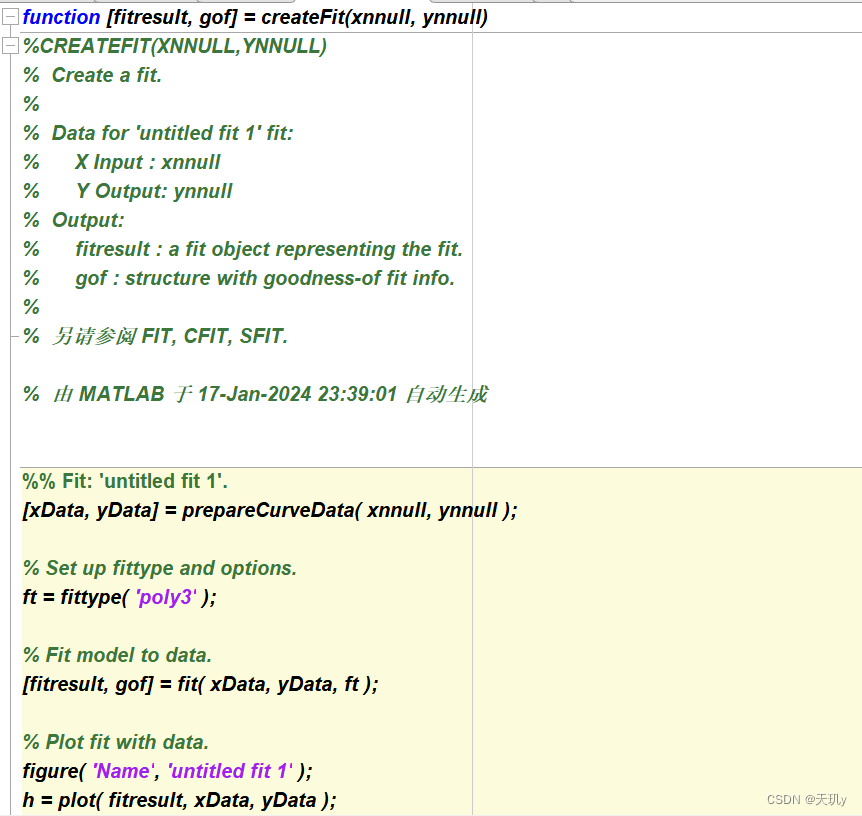
在其他脚本文件中使用如下代码可以得到拟合结果:
[fitresult, gof] = createFit(xnnull, ynnull)
fitresult(x_new) % 这里放入要预测的x值
小结:
关注我给大家分享更多有趣的知识,以下是个人公众号,提供 ||代码兼职|| ||代码问题求解||
由于本号流量还不足以发表推广,搜我的公众号即可:
这篇关于拟合工具箱cftool的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!