本文主要是介绍基于杂交PSO算法的风光储微网日前优化调度(MATLAB实现),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
微网中包含:风电、光伏、储能、微型燃气轮机,以最小化电网购电成本、光伏风机的维护成本、蓄电池充放电维护成本、燃气轮机运行成本及污染气体治理成本为目标,综合考虑:功率平衡约束、燃气轮机爬坡约束、电网交换功率约束、储能装置约束、可控微电源出力约束等约束条件建立优化调度模型。
1.系统结构模型
1.1 光伏
光伏电池的空载电压与光谱辐照度有关,与电池面积无关。在100MW/cm2的太阳光谱辐照度下,单晶硅光伏电池的空载电压为450——600mV,最高可达690mV。当入射光谱辐照度变化时,光伏电池的空载电压与入射光谱辐照度的对数成正比。环境温度升高时,光伏电池的空载电压将下降,一般温度每升高1℃,Uoc约下降2——3mV。
由上述定义,可列出光伏电池等效电路中各变量的方程式如下:

式中,IO为光伏电池内部等效二极管PN结反向饱和电流,一般为常数;UD为等效二极管端电压;q为电子电荷;k为玻尔兹曼常量;T为热力学温度,A为PN结曲线常数。
光伏电池的伏安特性与光照强度和电池温度有关,可以认为光伏电池的数学物理模型方程以光照强度和电池温度作为参变量。以下是环境因素对光伏电池数学物理模型的修正。
当电池温度T、光照强度S不是参考光照强度和参考电池温度时,必须考虑它们的影响,并需要对光伏电池的数学物理模型进行修正。根据参考光照强度和参考电池温度下的Isc、Uoc、Im和Um,再将它们代入实用表达式,即可得到新的光照强度和新的电池温度下的伏安特性曲线。

1.2 风电
风力发电机的输出功率可以用下式表示:
式中:Pwt为风力发电机的输出功率,为空气密度,V为风速,R为风力发电机组的叶片半径,
Cp为风能利用系数。
风力发电机的出力和风速的关系为:
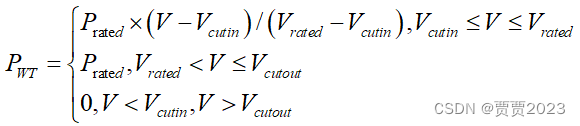
式中:Prated为额定功率;Vrated为额定风速,Vcutin为切入风速,Vcutout为切出风速
1.3 微型燃气轮机
选取燃氢微燃机作为氢电转换部分的能量耦合设备进行发电,该设备以氢⽓为燃料,燃烧产物只有水,实现零排放。
其数学模型为:
式中:为微燃机输出功率;
为微燃机热效率;
为消耗的天然气量;
为低位热值常量。
1.4 储能装置模型

式中:为储能装置容量;
为储能损失系数;
、
分别为充放电效率。
2. 目标函数
![]()
目标函数为微网运行经济成本,主要包括:与主网交换功率成本,光伏、风机、蓄电池的维护成本,燃气轮机运行成本,污染气体治理成本,燃气轮机开机成本。
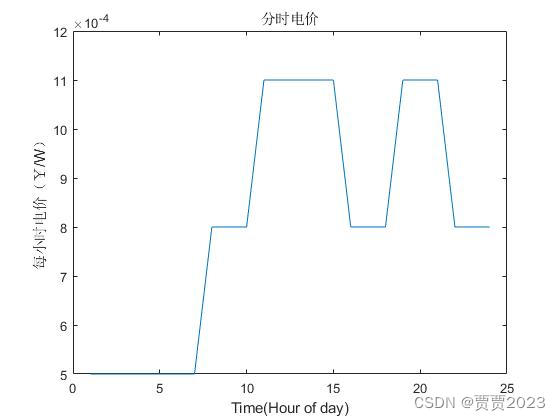
2.1 与主网交换功率成本

式中:和
分别对应与电网购电售电的分时电价;Nt为调度周期。
2.2 分布式电源维护成本
式中:为第i个分布式电源的输出功率;
为第i个分布式电源的运行维护系数,单位为元/kWh;Ni为分布式电源总个数;
2.3 微型燃气轮机运行费用

式中:Cmt为燃气轮机燃料成本系数,单位为元/m3;fmt为燃气轮机燃料消耗系数,单位为m3/kWh;Cmts为燃气轮机开机成本,单位为元/次;S(t)为燃气轮机t时段的启停状态.。
2.4 污染气体治理费用

3.约束条件
3.1 系统功率平衡约束
![]()
3.2 分布式电源输出功率约束

3.3 燃气轮机的爬坡约束
式中:Rup、Rdown为燃气轮机输出功率最大上升速率与下降速率,单位为kW/h。
3.4 微网与主网交换功率约束
![]()
微电网与主网的连接线有最大功率约束条件,故应满足该约束。
3.5 主网购售电状态互斥约束
![]()
主网购售电的状态量,取值为0或1。
3.6 燃气轮机启停时间约束
式中:Ut-k+1为燃气轮机在t-k+1时段的启停状态;Tmup、Tmdown分别为燃气轮机的最小启动时间和最小关停时间。
3.7 储能装置约束
![]()
式中:为一个调度周期后蓄电池SOC变化的最大范围;
为自放电系数。
4. 求解算法
采用PSO粒子群算法,用一种粒子来表示一个个体,每个粒子可视为N维搜索空间中的一个搜索个体,粒子的当前位置即为对应优化问题的一个候选解,粒子的飞行过程即为该个体的搜索过程.粒子的飞行速度可根据粒子历史最优位置和种群历史最优位置进行动态调整.粒子仅具有两个属性:速度和位置,速度代表移动的快慢,位置代表移动的方向。每个粒子单独搜寻的最优解叫做个体极值,粒子群中最优的个体极值作为当前全局最优解。不断迭代,更新速度和位置。最终得到满足终止条件的最优解。
算法流程如下:
①初始化
首先,我们设置最大迭代次数,目标函数的自变量个数,粒子的最大速度,位置信息为整个搜索空间,我们在速度区间和搜索空间上随机初始化速度和位置,设置粒子群规模,每个粒子随机初始化一个速度。
②个体极值与全局最优解
定义适应度函数,个体极值为每个粒子找到的最优解,从这些最优解找到一个全局值,叫做本次全局最优解。与历史全局最优比较,进行更新。
③更新粒子的速度和位置

式中:ω为惯性因子,C1和C2为加速度常数,前者为每个粒子的个体学习因子,后者为每个粒子的社会学习因子。
④终止条件
(1)达到设定迭代次数;(2)代数之间的差值满足最小界限。
本文在PSO粒子群算法的基础上进行改进,首先将传统固定惯性权重系数更改为根据全局最优点自适应调整惯性权重系数,即权重根据粒子的位置不同而动态变化。采用的非线性动态惯性权重系数公式为:

其中,f表示粒子实时的目标函数值;favg和fmin分别表示当前所有粒子的平均值和最小目标值。从上面公式可以看出,惯性权重随粒子目标函数值的变化而变化,当粒子目标值分散时,减小惯性权重;当粒子目标值集中时,增大惯性权重。
借鉴遗传算法中的杂交的概念,在每次迭代中,根据杂交率选取指定数量的粒子放入杂交池内,池内的粒子随机地两两杂交,产生同样数目的子代粒子,并用子代粒子代替父代粒子,具体计算公式和计算步骤,见《MATLAB智能算法》P132。
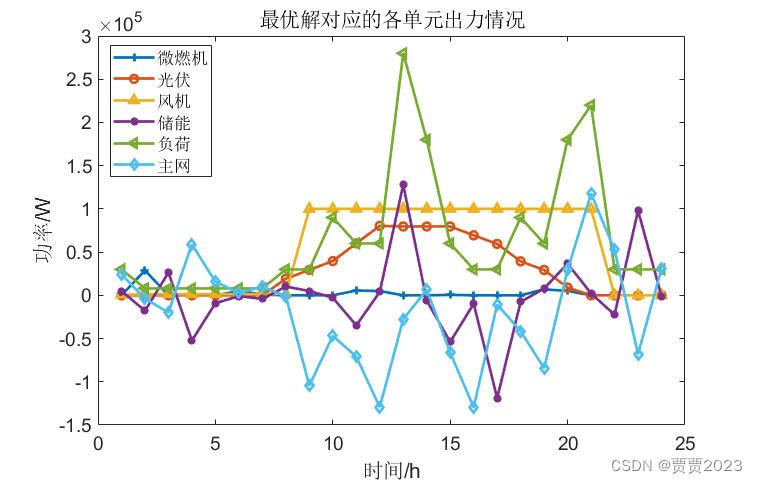
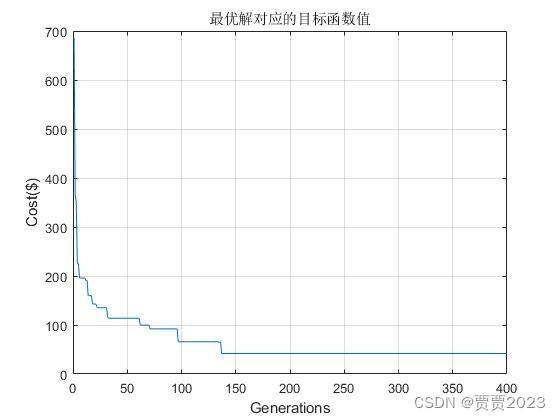
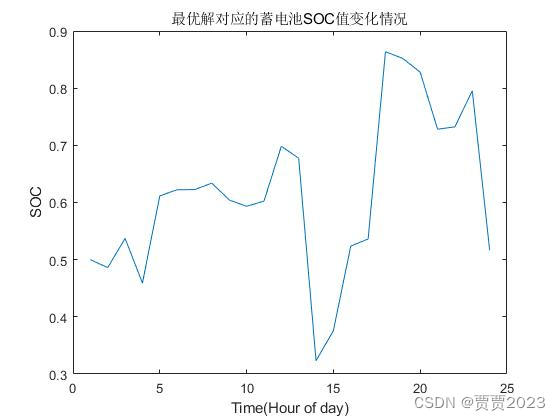
5.仿真结果
6.代码下载
本文相关全部代码下载地址:基于杂交PSO算法的风光储微网日前优化调度(MATLAB实现)
这篇关于基于杂交PSO算法的风光储微网日前优化调度(MATLAB实现)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





