本文主要是介绍课题学习(十八)----捷联测试电路设计与代码实现(基于MPU6050和QMC5883L),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、 电路设计
本周主要工作是在项目上,抽空做了一个跟本课题相关的电路板,之前用开发板来做测试,MPU6050和QMC5883L都是用杜邦线连接的,导致接线很乱,也不美观,当然也不符合“捷联”的定义。
下面是电路的原理图和PCB,因为已经购买了MPU6050和QMC5883L模块,所以直接使用这些模块来做,不再设计外围电路(不是懒,主要是这个电路板做测试使用,后续做课题看不会用这中比较low的MEMS传感器)。
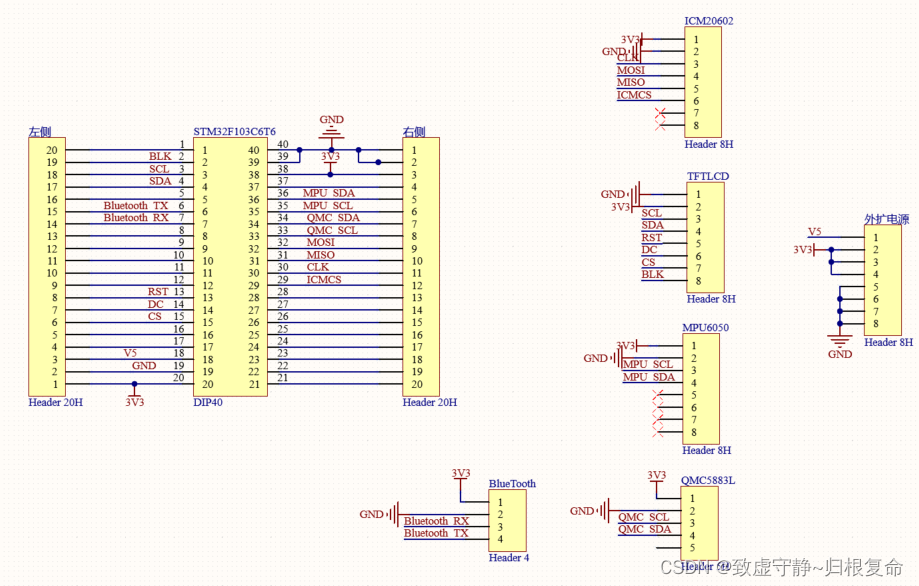


本次设计的电路有以下几个特点:
- 外扩排针,各模块仍然可以正常单独使用
- 外扩电源,可以使用5V电源直接供电
- 增加蓝牙模块,并设置为115200波特率,可以通过无线的方式获取传感器的数据
- 增加ICM20602,可以选择使用MPU6050或者ICM20602
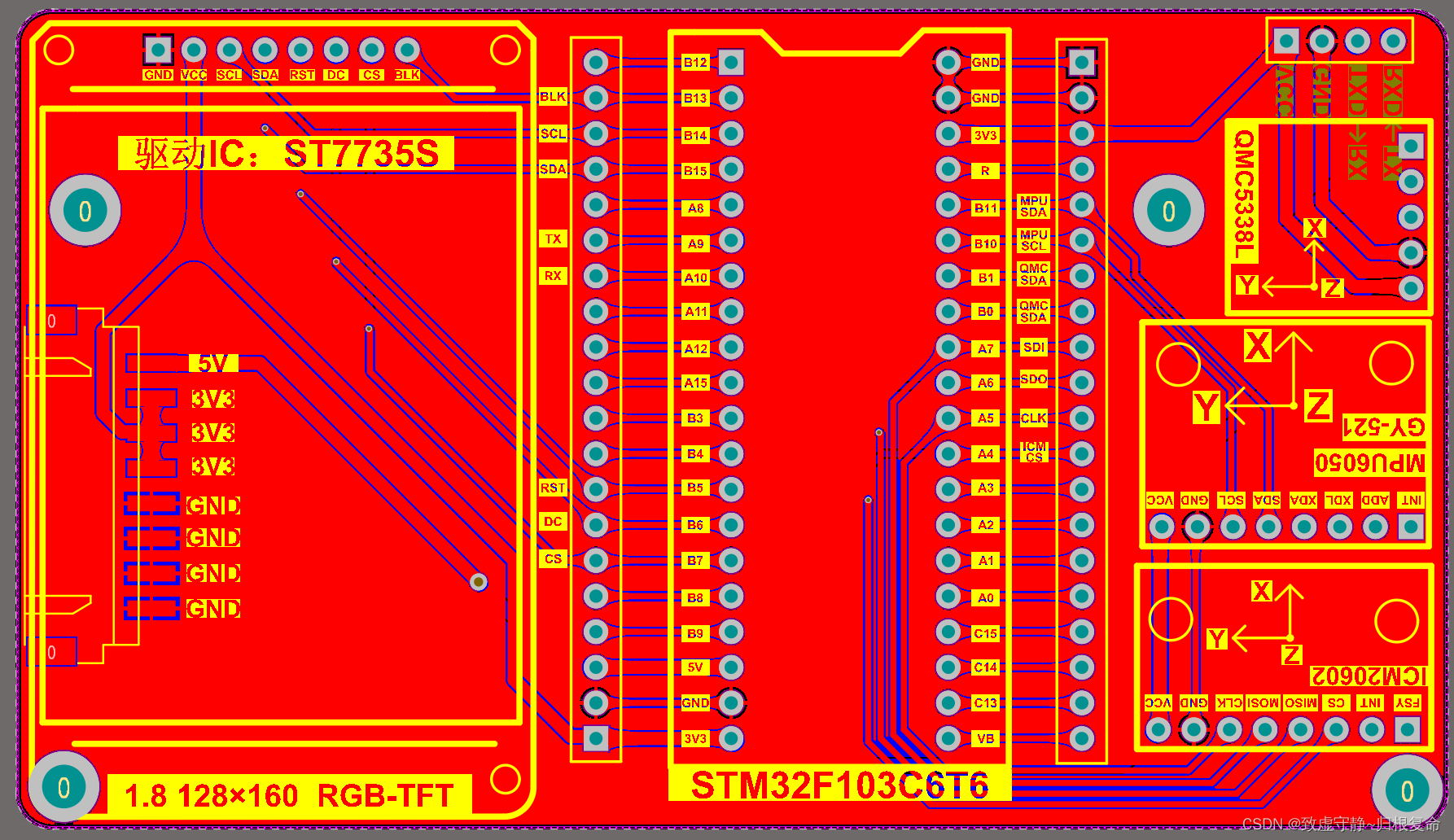
- 单独设计各模块的封装库(目前无3D模型),并标注三轴的方向已经对应模块的螺孔,可以根据封装库的位置直接增加螺孔
部分封装库如下所示:

有需要的可以联系我,或者去我的资源中进行下载。
二、 代码
下面是相关的部分代码:
ICM20602的代码可参考博客:STM32Cube高效开发教程<基础篇>(十四)----SPI通信及ICM20602软件开发,本博客后续的资源链接中也会包含ICM20602的代码。
MPU6050.c:
#include "mpu6050.h"
#include "stm32f1xx_hal.h"
uint8_t addressMPU6050;int16_t adcAccel_MPU6050[3]={0},adcGyro_MPU6050[3]={0};
//初始化MPU6050
//返回值:0,成功
// 其他,错误代码
uint8_t MPU_Init(void)
{ // MPU_IIC_Init();//初始化IIC总线MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050HAL_Delay(100);MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050 MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dpsMPU_Set_Accel_Fsr(0); //加速度传感器,±2gMPU_Set_Rate(50); //设置采样率50HzMPU_Write_Byte(MPU_INT_EN_REG,0X00); //关闭所有中断MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C主模式关闭MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //关闭FIFOMPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT引脚低电平有效addressMPU6050=MPU_Read_Byte(MPU_DEVICE_ID_REG); if(addressMPU6050==MPU_ADDR)//器件ID正确{MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作MPU_Set_Rate(50); //设置采样率为50Hz}else return 1;
// MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考
// MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作
// MPU_Set_Rate(50); //设置采样率为50HzMPU_IIC_SCL_HIG;MPU_IIC_SDA_HIG;return 0;
}
//设置MPU6050陀螺仪传感器满量程范围
//fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
//返回值:0,设置成功
// 其他,设置失败
uint8_t MPU_Set_Gyro_Fsr(uint8_t fsr)
{return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr<<3);//设置陀螺仪满量程范围
}
//设置MPU6050加速度传感器满量程范围
//fsr:0,±2g;1,±4g;2,±8g;3,±16g
//返回值:0,设置成功
// 其他,设置失败
uint8_t MPU_Set_Accel_Fsr(uint8_t fsr)
{return MPU_Write_Byte(MPU_ACCEL_CFG_REG,fsr<<3);//设置加速度传感器满量程范围
}
//设置MPU6050的数字低通滤波器
//lpf:数字低通滤波频率(Hz)
//返回值:0,设置成功
// 其他,设置失败
uint8_t MPU_Set_LPF(uint16_t lpf)
{uint8_t data=0;if(lpf>=188)data=1;else if(lpf>=98)data=2;else if(lpf>=42)data=3;else if(lpf>=20)data=4;else if(lpf>=10)data=5;else data=6; return MPU_Write_Byte(MPU_CFG_REG,data);//设置数字低通滤波器
}
//设置MPU6050的采样率(假定Fs=1KHz)
//rate:4~1000(Hz)
//返回值:0,设置成功
// 其他,设置失败
uint8_t MPU_Set_Rate(uint16_t rate)
{uint8_t data;if(rate>1000)rate=1000;if(rate<4)rate=4;data=1000/rate-1;data=MPU_Write_Byte(MPU_SAMPLE_RATE_REG,data); //设置数字低通滤波器return MPU_Set_LPF(rate/2); //自动设置LPF为采样率的一半
}//得到温度值
//返回值:温度值(扩大了100倍)
short MPU_Get_Temperature(void)
{uint8_t buf[2]; short raw;float temp;MPU_Read_Len(MPU_ADDR,MPU_TEMP_OUTH_REG,2,buf); raw=((uint16_t)buf[0]<<8)|buf[1]; temp=36.53+((double)raw)/340; return temp*100;;
}
//得到陀螺仪值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
uint8_t MPU_Get_Gyroscope(short *gx,short *gy,short *gz)
{uint8_t buf[6],res; res=MPU_Read_Len(MPU_ADDR,MPU_GYRO_XOUTH_REG,6,buf);if(res==0){*gx=((uint16_t)buf[0]<<8)|buf[1]; *gy=((uint16_t)buf[2]<<8)|buf[3]; *gz=((uint16_t)buf[4]<<8)|buf[5];adcGyro_MPU6050[0]=(buf[0]<<8)|buf[1]; adcGyro_MPU6050[1]=(buf[2]<<8)|buf[3]; adcGyro_MPU6050[2]=(buf[4]<<8)|buf[5];} return res;;
}
//得到加速度值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
uint8_t MPU_Get_Accelerometer(short *ax,short *ay,short *az)
{uint8_t buf[6],res; res=MPU_Read_Len(MPU_ADDR,MPU_ACCEL_XOUTH_REG,6,buf);if(res==0){*ax=((uint16_t)buf[0]<<8)|buf[1]; *ay=((uint16_t)buf[2]<<8)|buf[3]; *az=((uint16_t)buf[4]<<8)|buf[5];adcAccel_MPU6050[0]=(buf[0]<<8)|buf[1]; adcAccel_MPU6050[1]=(buf[2]<<8)|buf[3]; adcAccel_MPU6050[2]=(buf[4]<<8)|buf[5];} return res;
}
QMC5883L.c
// 模拟IIC发送单字节时序
uint8_t QMC5883L_SendByte(uint8_t Sim_i2c_data)
{uint8_t i;SDA1_OUT();QMC5883L_SCL_LOW;for(i=0; i<8; i++){if(Sim_i2c_data&0x80) QMC5883L_SDA_HIG;else QMC5883L_SDA_LOW;Sim_i2c_data<<=1;QMC5883L_NOP;QMC5883L_SCL_HIG;QMC5883L_NOP;QMC5883L_SCL_LOW;QMC5883L_NOP;}return QMC5883L_READY;
}// 模拟IIC发送单字节时序
uint8_t QMC5883L_ReceiveByte(void)
{uint8_t i,Sim_i2c_data;SDA1_IN();//QMC5883L_SDA_HIG;
// QMC5883L_SCL_LOW;Sim_i2c_data=0;for(i=0; i<8; i++){QMC5883L_SCL_LOW;QMC5883L_NOP;QMC5883L_SCL_HIG;// QMC5883L_NOP;Sim_i2c_data<<=1;SDA_Pin_State = QMC5883L_SDA_STATE;if(QMC5883L_SDA_STATE) Sim_i2c_data|=0x01;// QMC5883L_SCL_LOW;QMC5883L_NOP;}QMC5883L_SendNACK();return Sim_i2c_data;
}// 模拟IIC读单字节,带应答
uint8_t QMC5883L_ReceiveByte_WithACK(void)
{uint8_t i,Sim_i2c_data;SDA1_IN();//QMC5883L_SDA_HIG;
// QMC5883L_SCL_LOW;Sim_i2c_data=0;for(i=0; i<8; i++){QMC5883L_SCL_LOW;QMC5883L_NOP;QMC5883L_SCL_HIG;// QMC5883L_NOP;Sim_i2c_data<<=1;if(QMC5883L_SDA_STATE) Sim_i2c_data|=0x01;// QMC5883L_SCL_LOW;QMC5883L_NOP;}QMC5883L_SendACK();return Sim_i2c_data;
}// 模拟IIC的多字节读
uint8_t QMC5883L_Read8(uint8_t moni_dev_addr, uint8_t moni_reg_addr, uint8_t moni_i2c_len, uint8_t *moni_i2c_data_buf)
{QMC5883L_START();QMC5883L_SendByte(moni_dev_addr << 1 | WRITE );QMC5883L_Wait_Ack();QMC5883L_SendByte(moni_reg_addr);QMC5883L_Wait_Ack();//QMC5883L_STOP();QMC5883L_START();QMC5883L_SendByte(moni_dev_addr <<1 | READ );QMC5883L_Wait_Ack();while (moni_i2c_len){if (moni_i2c_len==1) *moni_i2c_data_buf =QMC5883L_ReceiveByte();else *moni_i2c_data_buf =QMC5883L_ReceiveByte_WithACK();moni_i2c_data_buf++;moni_i2c_len--;}QMC5883L_STOP();return 0x00;
}// 模拟IIC的多字节写
int8_t QMC5883L_Write8(uint8_t moni_dev_addr, uint8_t moni_reg_addr, uint8_t moni_i2c_len, uint8_t *moni_i2c_data_buf)
{uint8_t i;QMC5883L_START();QMC5883L_SendByte(moni_dev_addr << 1 | WRITE); // 写指令QMC5883L_Wait_Ack();QMC5883L_SendByte(moni_reg_addr);QMC5883L_Wait_Ack();//QMC5883L_START();for (i=0; i<moni_i2c_len; i++){QMC5883L_SendByte(moni_i2c_data_buf[i]);QMC5883L_Wait_Ack();}QMC5883L_STOP(); return 0;
}uint8_t highByte(uint16_t value)
{uint8_t ret;value = value>>8;ret = (uint8_t)value;return ret;
}uint8_t lowByte(uint16_t value)
{uint8_t ret;value = value&0x00ff;ret = (uint8_t)value;return ret;
}// 读一个字节
uint8_t readOneByte(uint8_t in_adr)
{uint8_t retVal = -1;QMC5883L_Read8(QMC5883L_ADDR,in_adr,1,&retVal);QMC5883L_NOP;return retVal;
}// 读两个字节
uint16_t readTwoBytes(uint8_t in_adr_hi, uint8_t in_adr_lo)
{uint16_t retVal = -1;uint8_t low=0,high=0;/* Read Low Byte */low = readOneByte(in_adr_lo);/* Read High Byte */ high = readOneByte(in_adr_hi);//printf("high:%d,low:%d ",high,low);retVal = high << 8;retVal = retVal | low;//printf("retVal:%d\r\n",retVal);return retVal;
}// 写一个字节
void writeOneByte(uint8_t adr_in, uint8_t dat_in)
{uint8_t dat = dat_in;QMC5883L_Write8(QMC5883L_ADDR,adr_in,1,&dat);
}// 获取地址
int16_t getAddress()
{return QMC5883L_ADDR;
}//************************写入单字节数据***************************//初始化QMC5883,根据需要请参考pdf进行修改****
void Init_QMC5883()
{uint8_t addrVale;addrVale = 0x1D;QMC5883L_Write8(QMC5883L_ADDR,CONTROL_REG_1,1,&addrVale); //控制寄存器配置addrVale = 0x01;QMC5883L_Write8(QMC5883L_ADDR,SET_RESET_REG,1,&addrVale); //设置清除时间寄存器
}void GetMagValue(void)
{QMC5883L_Read8(QMC5883L_ADDR,XOUT_L,6,Buff);MagnetRawAd[0] = ((int16_t)Buff[1] << 8) | Buff[0];MagnetRawAd[1] = ((int16_t)Buff[3] << 8) | Buff[2];MagnetRawAd[2] = ((int16_t)Buff[5] << 8) | Buff[4];
}
QMC5883L.h
#ifndef __MD_AS5600_H
#define __MD_AS5600_H#include "stm32f1xx_hal.h" //这个需要根据不同的芯片类型进行变换
#include "main.h"// QMC地址
#define QMC5883L_ADDR 0x0D// 三轴磁力计输出寄存器
#define XOUT_L 0x00
#define XOUT_H 0x01#define YOUT_L 0x02
#define YOUT_H 0x03#define ZOUT_L 0x04
#define ZOUT_H 0x05// 状态寄存器
#define STATUS 0x06// 温度输出寄存器
#define TEMP_L 0x07
#define TEMP_H 0x08// 控制寄存器
#define CONTROL_REG_1 0x09
#define CONTROL_REG_2 0x0A// SET/RESET,推荐写入0x01
#define SET_RESET_REG 0x0B// 芯片ID号
#define CHIP_ID 0x0D#define QMC5883L_SCL_LOW HAL_GPIO_WritePin(QMC_SCL_GPIO_Port,QMC_SCL_Pin,GPIO_PIN_RESET)
#define QMC5883L_SCL_HIG HAL_GPIO_WritePin(QMC_SCL_GPIO_Port,QMC_SCL_Pin,GPIO_PIN_SET)
#define QMC5883L_SDA_LOW HAL_GPIO_WritePin(QMC_SDA_GPIO_Port,QMC_SDA_Pin,GPIO_PIN_RESET)
#define QMC5883L_SDA_HIG HAL_GPIO_WritePin(QMC_SDA_GPIO_Port,QMC_SDA_Pin,GPIO_PIN_SET)//#define Sim_I2C1_SDA_STATE (IIC_SDA_GPIO_Port->IDR &= (IIC_SDA_Pin))
#define QMC5883L_SDA_STATE (QMC_SDA_GPIO_Port->IDR &= (QMC_SDA_Pin))
//#define QMC5883L_SDA_STATE HAL_GPIO_ReadPin(QMC_SDA_GPIO_Port,QMC_SDA_Pin)#define QMC5883L_DELAY QMC5883L_Delay(100000)
#define QMC5883L_NOP QMC5883L_Delay(1000) //25 #define QMC5883L_READY 0x00
#define QMC5883L_BUS_BUSY 0x01
#define QMC5883L_BUS_ERROR 0x02#define QMC5883L_NACK 0x00
#define QMC5883L_ACK 0x01#define SDA_Pin_Num 1#define WRITE 0x00
#define READ 0x01extern uint16_t rawdata;
extern float degress ;extern int16_t MagnetRawAd[3]; // 磁力计数据void SDA1_IN ( void );
void SDA1_OUT ( void );void QMC5883L_Delay(uint32_t delay);
uint8_t QMC5883L_START(void);
void QMC5883L_STOP(void);
unsigned char QMC5883L_Wait_Ack(void);
void QMC5883L_SendACK(void);
void QMC5883L_SendNACK(void);
uint8_t QMC5883L_SendByte(uint8_t Sim_i2c_data);
uint8_t QMC5883L_ReceiveByte(void);
uint8_t QMC5883L_ReceiveByte_WithACK(void);
uint8_t QMC5883L_Read8(uint8_t moni_dev_addr, uint8_t moni_reg_addr, uint8_t moni_i2c_len, uint8_t *moni_i2c_data_buf);
int8_t QMC5883L_Write8(uint8_t moni_dev_addr, uint8_t moni_reg_addr, uint8_t moni_i2c_len, uint8_t *moni_i2c_data_buf);
uint8_t highByte(uint16_t value);
uint8_t lowByte(uint16_t value);
uint8_t readOneByte(uint8_t in_adr);
uint16_t readTwoBytes(uint8_t in_adr_hi, uint8_t in_adr_lo);
void writeOneByte(uint8_t adr_in, uint8_t dat_in);
int16_t getAddress();void Init_QMC5883();
void GetMagValue(void);#endif
有关QMC5883L芯片会在假期之后更新一篇,讲解IIC通信以及该芯片,后续会补充上链接。
资源链接:
基于STM32F103C6T6的九轴传感器的工程
STM32F103C6T6模块、MPU6050模块、ICM20602模块等封装库
三、往期回顾
课题学习(一)----静态测量
课题学习(二)----倾角和方位角的动态测量方法(基于磁场的测量系统)
课题学习(三)----倾角和方位角的动态测量方法(基于陀螺仪的测量系统)
课题学习(四)----四元数解法
课题学习(五)----阅读论文《抗差自适应滤波的导向钻具动态姿态测量方法》
课题学习(六)----安装误差校准、实验方法
课题学习(七)----粘滑运动的动态算法
课题学习(八)----卡尔曼滤波动态求解倾角、方位角
课题学习(九)----阅读《导向钻井工具姿态动态测量的自适应滤波方法》论文笔记
课题学习(十)----阅读《基于数据融合的近钻头井眼轨迹参数动态测量方法》论文笔记
课题学习(十一)----阅读《Attitude Determination with Magnetometers and Accelerometers to Use in Satellite》
课题学习(十二)----阅读《Extension of a Two-Step Calibration Methodology to Include Nonorthogonal Sensor Axes》
课题学习(十三)----阅读《Calibration of Strapdown Magnetometers in Magnetic Field Domain》论文笔记
课题学习(十四)----三轴加速度计+三轴陀螺仪传感器-ICM20602
课题学习(十五)----阅读《测斜仪旋转姿态测量信号处理方法》论文
课题学习(十六)----阅读《Continuous Wellbore Surveying While Drilling Utilizing MEMS Gyroscopes Based…》论文
课题学习(十七)----姿态更新的四元数算法总结
这篇关于课题学习(十八)----捷联测试电路设计与代码实现(基于MPU6050和QMC5883L)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





