捷联专题

解析式粗对准 matlab,未知纬度条件下捷联惯导直接解析式粗对准方法与流程
本发明提供的是一种未知纬度条件下捷联惯导系统的粗对准方法。 背景技术: 捷联惯导初始对准是系统工作的基本前提,其核心任务是获取载体坐标系相对导航坐标系的姿态关 系。近年来,捷联惯导初始对准已经形成了许多成熟的方法,如基于最优估计的对准方法、罗经对准法、 基于矢量定姿的对准方法等等,诸多方法在应用过程中都需要精确的纬度信息支持。目前,纬度信息常来 源于卫星或无线电定位手段,而对于水下、地下、密林

课题学习(十八)----捷联测试电路设计与代码实现(基于MPU6050和QMC5883L)
一、 电路设计 本周主要工作是在项目上,抽空做了一个跟本课题相关的电路板,之前用开发板来做测试,MPU6050和QMC5883L都是用杜邦线连接的,导致接线很乱,也不美观,当然也不符合“捷联”的定义。 下面是电路的原理图和PCB,因为已经购买了MPU6050和QMC5883L模块,所以直接使用这些模块来做,不再设计外围电路(不是懒,主要是这个电路板做测试使用,后续做课题看不会用这中比较l
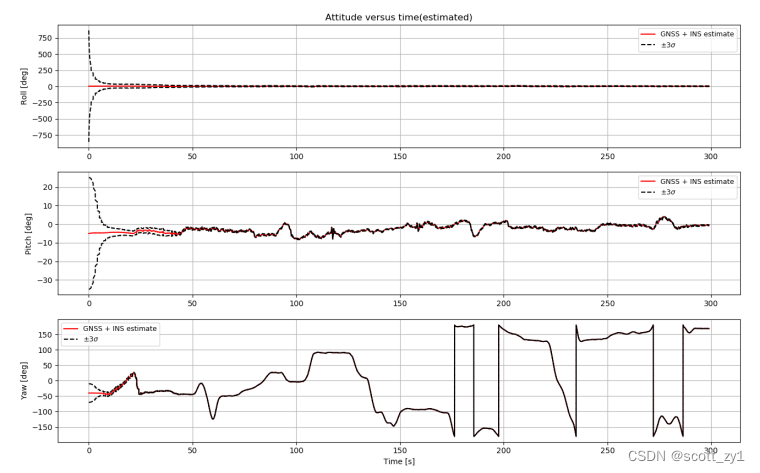
INS/GNSS组合导航(十)松耦合捷联车载定位解算示例
1.摘要 基于GNSS信号辅助IMU实现车载导航,可有效规避IMU积分误差累积效应及GNSS信号丢失导致位姿解算失准的问题,为此本文引入结合GNSS与IMU的松组合融合定位计算方法实现低成本车载IMU传感器的准确定位. 2.算法实现 2.1流程图 基于融合的INS/GNSS组合导航方法 实现位姿解算(求解PVA)的流程图如下。 2.2算法实现 2.2.1主要坐