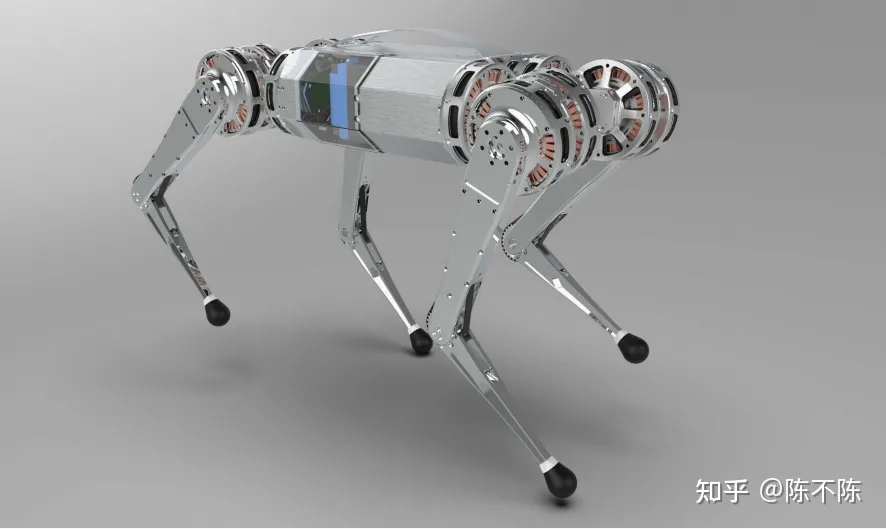
本文主要是介绍[机器人-2]:开源MIT Min cheetah机械狗设计(二):机械结构设计,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1、四肢朝向的选择
2、电机布局形式的选择
3、电机的选型及测试(非常重要)
4、结构优化
5、尺寸效应
6、其他
1、四肢朝向的选择
机械狗的结构设计,第一个摆在我们面前的就说四肢的朝向问题,如下图,我们是选择猎豹的向前弯曲,还是角马的向后弯曲呢?其实为了方便爬楼梯选择了向后弯曲,也即角马的骨骼形式。

不同动物的骨骼形式
2、电机布局形式的选择
一般我们在设计四肢运动的时候,最先想到的就是在各个关节上直接加一个电机,如下图的左边所示,两个关节处各加装一个电机,但是,这样当小腿在摆动的时候,惯性会非常大,可以想象如果在你的膝盖住绑一个沙袋,在行走时就会非常的费劲,非常消耗能量,因此我们自然而然会想到将膝盖处的电机移动到上端,通过一个同步带和膝盖相连,如右图所示。

左图:电机安装在关节处,右图:电机集中安装在髋关节
除此之外还要考虑一个问题,如果机械狗摔倒后还要能够翻身起来,我们自然而然会想到再增加一个自由度,也即还要增加一个倾斜电机,原因如下面视频所示:

00:22
3、电机的选型及测试(非常重要)
一个机械狗动力强不强劲,电机起到至关重要的作用,机械狗的电机比较特殊,类似于公版电机T-Motor U8的型号,这款电机是广泛应用于四旋翼的,需要很高的能量密度(不然就无法完成后空翻这样的经典动作),因此机械狗的动力选择的是无人机的无刷电机+行星齿轮组的形式,每个执行器都由一个定制的高耦合到单级6:1的行星齿轮减速机(背隙0.005rad/0.28°)。有效改善机器人的承载能力和低速效率,(至于这里减速比为什么选择6,网上有不少讨论,比如这篇文章MIT Mini Cheetah的关节驱动器为何选用减速比为6的单级内嵌式行星减速器? - 知乎,我个人比较倾向于,MIT在设计驱动器的时候,使用了成熟的商用驱动器,也算是一种妥协,机械狗的整个重量,结构布局可能都会受驱动器的影响,后期的Cheetah 3系列就采用了自研的驱动电机。)
使用电机驱动一体化的一大优点是,不需要额外的机械结构和昂贵的传感器就能做到力控。这是因为小减速箱的非线性误差可以忽略不计,因此直接使用电机的电流环和相应的减速比,就能得到驱动器端的输出扭矩。
以上的设计思路,就带来了一个极其紧凑、轻量化的驱动器整体集成效果,当然缺点也很明显,采用镂空减重设计,防水防尘比较麻烦。

机械狗电机结构图
使用到的相关齿轮箱和轴承的型号如下:
行星轮:Misumi GEFHB0.5-40-5-8-W3
太阳轮:Misumi GEABN0.5-20-8-K-4
环形齿轮: KHG SI0.5-100
滚动轴承: HK0408
下腿由通过的同步带驱动和上腿相连,提供额外的1.15减速比。可以旋转360度,
让机器人任意改变膝盖向前或向后的方向。而且同步带可以有效的缓冲猛烈的冲击,
具有很好的缓冲效果。髋关节可以连续旋转,仅受连接膝关节执行器的电线长度影响。
允许机器人倒着操作,爬上障碍物,或者用脚在身体上方操纵。四条腿的总重量为2.7千克,
只有机器人质量的30%。每条腿的末端有一个由10毫米厚的60A聚氨酯橡胶制成的盖子。
提供缓冲和抓地力。驱动器的参数:

电机设计完成后,如果加工组装完成还需要对电机进行一系列的测试,包括:
1)、扭矩测试、功率测试、效率图绘制,这里需要使用到扭矩测量仪。

2)、电流扭矩测试

左图:扭矩/电流特性 右图:扭矩常数/电流特性
3)、电角度校准(用于FOC算法调试)
另外电机采用的FOC控制,还要对电角度进行校准,FOC算法中一个重要的指标就是要知道电角度,电角度由磁编码器获得,由于电机摩擦和惯量的存在,实际运行时,它总是稍微滞后于参考角度,如下图左上角;位置传感器的偏心会引起低频纹波,如下图左下角;齿槽转矩又会引起高频纹波,如下图右上角;消除这些误差以后会建立一个表记录下来,只要磁编码器没有重新拆装,下次上电,表记录的数值依然有效,这样在程序运行的时候,可以通过查表来消除传感器误差。

磁编码器误差消除
4)、热分析
除此之外由于机械狗频繁的运动,还要对电机进行高温测试,防止电机高温消磁,高温报警等。

高温试验
4、结构优化
现在机械狗的基本构型就有了,现在我们最关心的还是腿部,希望腿部的惯性尽量的小,这里我们需要对腿部的结构进行拓扑优化,满足性能的同时,质量最小。需要用到有限元模拟软件ANSYS进行拓扑优化,特别是对质量要求比较苛刻,构件材料比较昂贵,这种就体现出了有限元仿真的价值,可以减少不少试错成本。


结构优化
5、尺寸效应
转自知乎网友的一段话
在关节式机器人爆发运动能力这方面,尺寸越大的机器人对驱动器的功率输出密度要求越高,技术实现也越困难。具体定量一点说:机器人尺寸假设扩大 � 倍,那么相应质量是 �3 量级的增长,而所需要驱动扭矩则是 �4 量级的增大。对于驱动器输出性能而言(现有的永磁体+线圈式电机,扭矩是�2的增长,就是4次方的增长与2次方增长的区别),增大机器人尺寸简直是噩梦,反之缩小机器人尺寸,能占很大的便宜。
6、其他
除上述分析以外,还有冲击性能分析,轴承载荷校准等,这些这里不做具体分析,详细可以见相关论文。
到此为止,一个完整的机械狗机械部分就有了雏形了。
这篇关于[机器人-2]:开源MIT Min cheetah机械狗设计(二):机械结构设计的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!