cheetah专题
![[机器人-3]:开源MIT Min cheetah机械狗设计(三):嵌入式硬件设计](https://img-blog.csdnimg.cn/img_convert/1d14f7d5981ce07a7f3fcd1811fc45e8.webp?x-oss-process=image/format,png)
[机器人-3]:开源MIT Min cheetah机械狗设计(三):嵌入式硬件设计
目录 概述: 1、硬件组成 2、通信速率 3、通信协议 4、mbedOS 概述: 以1条腿进行设计,其它腿也一样: 腿部硬件组成 1、硬件组成 1)UP board计算机板卡(Linux OS): 腿部控制器基于Cortex-A8的处理器,执行腿部控制任务,如笛卡尔阻抗的控制或联合PD控制。负责完成较高的腿部频率和高速关节速度摇摆时的滤波、高带宽跟踪相位以及其他位
![[机器人-2]:开源MIT Min cheetah机械狗设计(二):机械结构设计](https://img-blog.csdnimg.cn/img_convert/70e68b5ac41c481b21b9100b876bc006.webp?x-oss-process=image/format,png)
[机器人-2]:开源MIT Min cheetah机械狗设计(二):机械结构设计
目录 1、四肢朝向的选择 2、电机布局形式的选择 3、电机的选型及测试(非常重要) 4、结构优化 5、尺寸效应 6、其他 1、四肢朝向的选择 机械狗的结构设计,第一个摆在我们面前的就说四肢的朝向问题,如下图,我们是选择猎豹的向前弯曲,还是角马的向后弯曲呢?其实为了方便爬楼梯选择了向后弯曲,也即角马的骨骼形式。 不同动物的骨骼形式 2、电机布局形式的选择 一般我
[机器人-3]:开源MIT Min cheetah机械狗设计(三):嵌入式硬件设计
目录 概述: 1、硬件组成 2、通信速率 3、通信协议 4、mbedOS 概述: 以1条腿进行设计,其它腿也一样: 腿部硬件组成 1、硬件组成 1)UP board计算机板卡(Linux OS): 腿部控制器基于Cortex-A8的处理器,执行腿部控制任务,如笛卡尔阻抗的控制或联合PD控制。负责完成较高的腿部频率和高速关节速度摇摆时的滤波、高带宽跟踪相位以及其他位
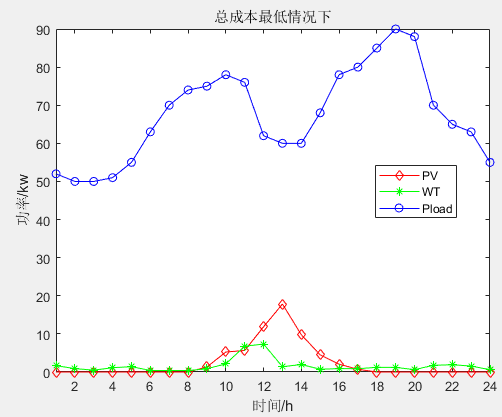
单目标应用:猎豹优化算法(The Cheetah Optimizer,CO)求解微电网优化MATLAB
一、微网系统运行优化模型 微电网优化模型介绍: 微电网多目标优化调度模型简介_IT猿手的博客-CSDN博客 二、猎豹优化算法CO 猎豹优化算法(The Cheetah Optimizer,CO)由MohammadAminAkbari等人于2022年提出,该算法性能高效,思路新颖。单目标优化:猎豹优化算法(The Cheetah Optimizer,CO)求解cec2020(提供Matlab