本文主要是介绍面向智能汽车的人车交互设计与人车共驾控制探索,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
11月23日,由中国智能交通协会道路车辆专业委员会、中国汽车技术研究中心主办的2017’第十二届中国智能交通年会“智能网联汽车技术发展论坛上,吉林大学汽车仿真与控制国家重点实验室胡宏宇发表《面向智能汽车的人车交互设计与人车共驾控制探索》的演讲,本文为演讲速记整理,未经演讲者本人审核。

吉林大学汽车仿真与控制国家重点实验室 胡宏宇
01
智能网联汽车与辅助驾驶发展
去年发布的节能与新能源汽车技术路线图里面明确提出了智能网联汽车的等级划分,在等级划分的表格中,我们看到了其中人和车控制权的问题,这个也是目前智能汽车领域比较关注的一个焦点,如何更好地发挥人类驾驶员和智能汽车驾驶员各自的优势特点,保证汽车能够最优的行驶性能,并且能够被车内的驾乘人员所接受,这个应该是智能汽车发展的很关键的问题。

图1 中国制造2025智能网联汽车发展途径
在人车路闭环系统中,人是系统的核心要素,以人为中心是人机系统相互协调工作的本质需求,无论是传统的汽车人机交互设计,还是面向智能汽车驾驶辅助,包括人车协同共驾的控制,这里面的人始终是一个关注的重点。人的驾驶过程具有复杂性、随机性还有时变性,驾驶人起到什么作用这个是我们深入探讨的。

图2 辅助驾驶对于“人”行为的重要作用
02
驾驶过程人因解析
自动驾驶过程中可能面临的问题,第一个,是从技术层面上来看,汽车智能化技术与人类驾驶的能力冲突。人类驾驶员本身是在驾驶过程中逐渐退化的作用,会疲劳、累或者会分心,但是智能汽车的系统由于高精度的传感、执行、控制,它的技术是规定好的,也不会退化,在这个过程中有一个问题,智能化的技术对于未知环境的理解,认知理解能力是有限的,这是人类驾驶员和汽车驾驶员的冲突。
第二个冲突是自动驾驶和人工驾驶认知方面的冲突,这可能是认知层面的冲突,我们知道目前的一些自动驾驶设计都是基于驾驶人规则执行或者说规则驾驶的一些模式设定的,有相关的一些逻辑参数,在自适应方面包括人性化方面做的很不到位,人类驾驶是很随机的,尤其遇到某些红绿灯的时候。可能自动驾驶和人工驾驶的汽车这时候会发生一定的冲突。
第三个汽车智能化产业的快速发展和人类社会接受的冲突,我们真正坐上自动驾驶的时候,是不是能够被人所接受。2015年的时候波士顿有一个智能汽车的报告提到,除了技术本身以外,人类社会的接受形式很关键,目前自动驾驶大概只有56%认同的。
03
自动驾驶中的驾驶权接管问题
我们来看一下,这里主要提到的人车交互还有人车共驾的问题,首先我们需要明确一下,梳理一下人车共驾究竟是个什么东西,我觉得是从这里提到的人车控制权的交互还有一个相应协同,这里给划分了几个等级,从传统的TCS、ESP、EBA等的系统,我们也认为是人车协同系统,包括初级的ACC、LKA针对纵向和侧向的功能,我们也涉及人车协同的控制。我们目前关注的焦点,就像我刚才提到的人车驾驶能力的差异性是什么样的?冲突性是什么样的?驾驶人在驾驶过程中行为包括状态的演变规律是什么样的?从自动驾驶到人工驾驶切换,人的状态应该是什么样的?如何提高智能汽车,协同共驾的体验感?这一系列的问题都是我们面临的。 
图3 驾驶行为分析三维结构模型
我们解析了一下常规驾驶员的行为,通常我们把驾驶的行为分为感知、决策、控制,在这个过程中,除了驾驶员的一些精神上的负荷还有产生体力的负荷,一方面是操作的技能这些都影响驾驶的效果,这里又把人的负荷细化了一下,精神的扶植包括认知、判断和情绪,体力负荷简单地划分了一下,从肌体的角度考虑,身体的疲劳。如何能够客观准确地测试分析并且建模驾驶员自然操作的行为,数字化地表述驾驶员的心声,包括手脚眼的操作习性,这对人机交互协同共驾具有重要的意义。
在驾驶的过程中,人往往应该处于一个驾驶的负荷较佳的范围,在这个范围里应该是达到比较好的程度,无论是驾驶负荷的降低包括驾驶负荷的增大,都意味着驾驶的表现与绩效会降低。我们再来分析一下,自动驾驶和人工驾驶过程中我们人的一个情况,在人工驾驶的条件下,自动化的程度相对比较低的,人主要是从事一些主要的任务,那就是驾驶任务,驾驶负荷通常在相对最佳的或者适合驾驶的范围内,视觉的特性主要还是关注在道路的前方。人类对于未知事件的理解和认知能力还是很强的,对于自动驾驶来说,自动化的程度是比较高的,人类可能会从事一些次要的任务,驾驶的负荷这个时候是相对较低的,视觉的注意点也不是在路面上,可能会读书、看电影、打电话,自动驾驶缺乏对于一些特殊事件未知环境的理解。
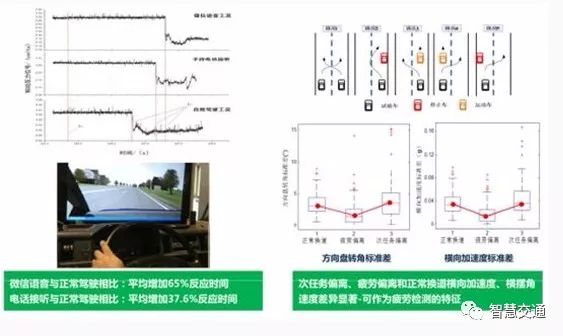
图4 次任务下驾驶员认知负荷测试-认知分心
我们想从自动驾驶切换到人工驾驶这样的过程,怎么能够让人的负荷,从一个相对较小的状态过渡到较高的状态,这个过程需要我们描述出人的状态是什么样的?怎么样克服负荷的突变?
从自动驾驶到人工驾驶,这里可能涉及到两个关键的问题,一个是驾驶负荷的评估,另外一个是情景意识的找回,这面又给出了驾驶负荷和情景意识相关的解释。驾驶负荷我们在执行相关的一些任务时的紧张感、压力感,体现在我刚才所说的精神负荷还有体力负荷。情景意识就是我们在一定的时间和空间下,驾驶员进行环境的感知,理解周围环境的意义,并能预测周围未来环境的变化情况。
在这个过程中,怎么快速地回到驾驶场景里?这是我们关注的重点,只有这样才能实现平稳舒适的切换过程。
接下来描述一下高度自动驾驶下驾驶员接管的情况,高速自动驾驶下,正常来讲,是不需要人来进行监控周围的车辆驾驶任务,但是目前很多的厂商还是要求监控,人是非常容易从事一些非驾驶任务,这个时候就容易导致情景意识的丧失,这个时候如果遇到一些事故,我们来不及反应,我们需要分析驾驶员是否具备接管能力,如果具备接管能力,我们想办法快速找回情景意识。当驾驶员驾驶能力在一个合理的范围内的时候,我们怎么去判断是否在一个合理的范围,这是我们关注的重点,从一些精神负荷这样的表现进行相应的评估,然后我们进行相应的切换。如果这时候人不具备这样的接管能力,这时候怎么办?刚才也听到了很多专家提到的比如说云控网控,可以采用第三方的控制。
找回情景意识就涉及到怎么去相应地找回,进行情景意识评估的问题,可能从视觉、心理包括相应的评价找回。刚才提到了整个接管过程人的行为过程描述,接下来的固件问题就是通过什么方式请求,目前主要是语音、图像包括体感、情感,还有现在在研究脑机接口的方式,这些都是智能汽车HMI的接口的方式,交互的方式。我也列几条,从视觉、听觉、触觉、体感、情感方面的交互,包括人性化、个性化的监管控制模式,以及基于人体新生理信息的评价。
04
仿人驾驶行为ADAS研发
我们认为在ADAS设计,包括一些传统电工系统设计的时候,往往在考虑车辆本身的东西之外,还要考虑运用学特征包括一些强的非线性、耦合性,包括机器相应之后的特性等,除了本身机械的汽车特性以外,我们更多的还应该关注人的驾驶体验评价,这样去进行一个基于驾驶员行为模型驾驶控制行为数据,包括驾驶员生理体验一体化的人车控制策略。 
图5 ACC开发-测试-评价
在驾驶员行为模型一块,传统是基于优预瞄曲的模型,进而到统一模型,2005年是做多目标优化的模型,面向ADAS系统,现在在做的更多考虑驾驶员的认知能力,包括决策,包括骨肌运用方面的驾驶员情况,包括驾驶员个性化、操作能力、操作水平、操作风格一系列的,引入到驾驶员的模型里面。
最后做一个总结,我们认为未来的人车交互设计和共驾协同控制是一种以人为本的智能化,这里可能需要的是一个多学科,比如车辆工程、人机工程、认知科学、运动控制、人体医学等相关学科交叉融合的结果,我们可能需要搭建一个驾驶行为,包括人机交互的基础数据库,以及去构建驾驶能力,包括刚才提到的驾驶负荷、驾驶状态的一些评估表征手段,同时设计人性化、个性化的多模态的自然交互的通道,搭建人机交互还有人车共驾评价测试这样的平台。我们需要更多的融入人工智能的技术,人工智能技术我们了解到的计算机视觉、深度学习等这样的级别,其实更多的是有一些比如说认知科学、脑科学、行为科学还有神经科学交叉的学科。人机交互和人车共驾更多的是需要考虑认知、情感、伦理、智慧还有文明。
这篇关于面向智能汽车的人车交互设计与人车共驾控制探索的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



