本文主要是介绍ICESat-2/ATLAS06卫星数据处理2(附代码)-冰川物质平衡监测,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
冰川是冰冻圈系统的重要组成部分,对气候和环境变化具有高度敏感性,是监测气候变化的良好指示器。首先冰川的变化意味着冰川的物质和形式的时空变化。而由于气候变化导致的冰川融化或积聚导致冰川的物质平衡发生变化,最终增加了冰川的面积或融化了冰川的末端。而冰川就像一个坚固的水库,冰川的退缩会导致某些山区缺水,冰川融化的水将形成冰川湖。由湖泊和冰川融化形成的大多数冰川湖是无法控制的堰塞湖,如果冰川湖破裂,下游可能会发生洪水。同样的冰川高程变化直接反映了冰川厚度的变化,并影响着气候、降水等一系列生态问题。因此监测冰川表面高程变化是非常必要的任务,成为许多研究者研究的热点问题。冰川表面高程变化反映了冰川物质平衡变化,是冰川物质平衡研究的重要内容。
冰川表面厚度变化的监测常用的方法如花杆测量、雪坑测量、多期DEM比较、摄影测量、冰雷达、航空/航天测高,包括雷达高度计和激光雷达。传统的方法是花杆测量,在冰川表面安插花杆进行检测,但是开展野外工作相当不容易,工作难度大,而且这种方法局限于易于观测的,范围较小,海拔较低,人可以涉足的冰川,而且精度很难保证,这就与测量的时间间隔,测量的方法等有着很大的关系。雪坑测量是通过在研究区域挖掘雪坑,钻取冰芯或雪芯,不同时间序列的冰芯或雪芯也是不同时期冰雪的沉降。在钻取冰芯或雪芯得同时测定不同深度的密度,就可以计算出某一时期内的积累量, 但由于可实施区域范围小,且作业困难,通常不是很好的监测方法。随着GPS精度的不断提高GPS技术逐渐应用到冰川的变化监测中,但是由于冰川环境恶劣,大范围开展GPS测量仍有一定的难度。冰雷达常用于监测极地冰盖厚度、内部构造以及冰下地貌,来重建过去的冰雪累积率与消融率。但冰雷达容易信号衰减形成雷达反射空白区域。卫星测高技术在获取地形特征和高程信息方面取得了较大的进步,为冰川变化监测提供了便利。利用激光测高卫星可以大面积进行观测,监测到冰川的变化。利用激光测高卫星数据,能更好的反映出高程变化的信息,在精度上也有一定的保证。随着激光测高系统的发展,一定会将冰川监测带上新的高度。
ICESat-2的传感器ATLAS更加先进,覆盖区域也更大,在冰川区域得到的脚点数据也更加密集。ICESat-2于2018年9月15日上午6:02(太平洋标准时间)在联合发射联盟的最终Delta II火箭上从范登堡空军基地的太空发射中心2号起飞。从那时起,在“冰桥行动”(Operation IceBridge)期间,为了填补ICESat-2发射前的数据缺口,研究人员一直在北极和南极地区飞行特别装备的P-3B和DC-8飞机。ICESat-2卫星上配有ATLAS(高级地形激光测高仪系统),其发射的光子需要3.3毫秒就能到达地球并返回。根据美国国家航空航天局的说法,ATLAS的测量误差可缩小到十亿分之一秒。利用物理定律,科学家们就可以计算出卫星到地球表面的距离,准确度精确到4毫米。ATL06号高程数据产品,它在沿轨和垂轨方向有计算的成对激光束的表面高,表1列举了ICESat-1卫星参数与ICESat-2卫星参数对比。
表1 ICESat-1卫星参数与ICESat-2卫星参数对比
Table 1 Comparisonof icesat-1 and icesat-2 satellite parameters
| ICESat-1项目 | 参数 | ICESat-2项目 | 参数 |
| 卫星标识 | ICESAT-1 | 卫星标识 | ICESAT-2 |
| 运载火箭 | Deltall2运载 | 运载火箭 | Deltall2运载 |
| 发射地点 | 加利福尼亚州 | 发射地点 | 加利福尼亚州 |
| 设计寿命/a | 3 | 设计寿命/a | 3 |
| 轨道高度/Km | 590 | 轨道高度/Km | 500 |
| 轨道倾角/度 | 94 | 轨道倾角/度 | 92 |
| 轨道类型 | 非太阳同步 | 轨道类型 | 非太阳同步 |
| 轨道周期/d | 183 | 轨道周期/d | 91 |
| 开始工作时间 | 2003年1月 | 开始工作时间 | 2018年9月 |
| 波长/nm | 1064;532 | 波长/nm | 532 |
| 波束数量 | 1 | 波束数量 | 6 |
| 脉冲频率/HZ | 40 | 脉冲频率/HZ | 10K |
| 光斑直径/m | 60~70 | 光斑直径/m | 17.5 |
| 脉冲能量/mJ | 1064;75 532;32 | 脉冲能量/mJ | 0.04~0.12 |
| 光斑间距/km | 航向 0.17 旁向 2.5~15 | 光斑间距/km | 航向 0.09 旁向 2.5~3.3 |
| 重复周期/d | 183 | 重复周期/d | 91 |
| 测高精度/m | 0.15 | 测高精度/m | 0.1 |
| 数据采集方式 | 模数转换 | 数据采集方式 | 光子计数 |
数据来源:https://nsidc.org/data/ICESat/(美国冰雪数据中心)
ICESat卫星测高原理:
激光高度计的测高原理是联合多个子系统进行定位,由GLAS传感器发射激光脉冲,通过穿过大气层的激光脉冲在地面产生的后向散射回波,分析激光脉冲回波的传播时间,因此可以计算出激光高度计与地面光斑之间的距离。联合星载GPS与地基卫星激光测距进行精密定轨,以确定传感器的空间位置,利用恒星相机与激光发射参考系统得到卫星的姿态信息和激光束的传播方向,联合这些观测值即可解算地面激光光斑的三维坐标。
ATLAS的工作模式如图1所示:我们可以看出ATLAS一共发射6束激光脉冲,分3组平行排列,每组之间地表距离约3km,组内2束激光脉冲间隔为90m,且为一强一弱,这样激光脉冲呈强弱间隔排列。由于可见绿光对光子的敏感性,激光波长不再像ICESat-1那样采用1064nm和532nm两个波长,而是使用532nm。
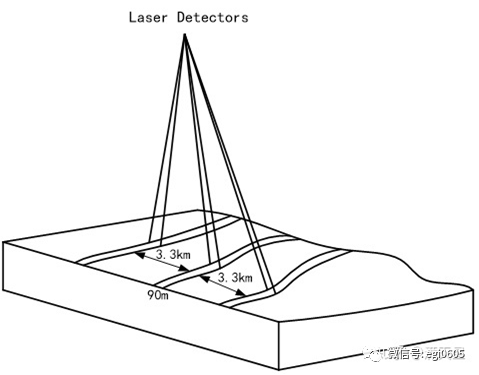
图1 多光束激光测量的示意图
Figure Schematic diagram of multi beamlaser measurement
数据处理代码实现:(详见公众号)

结果展示:
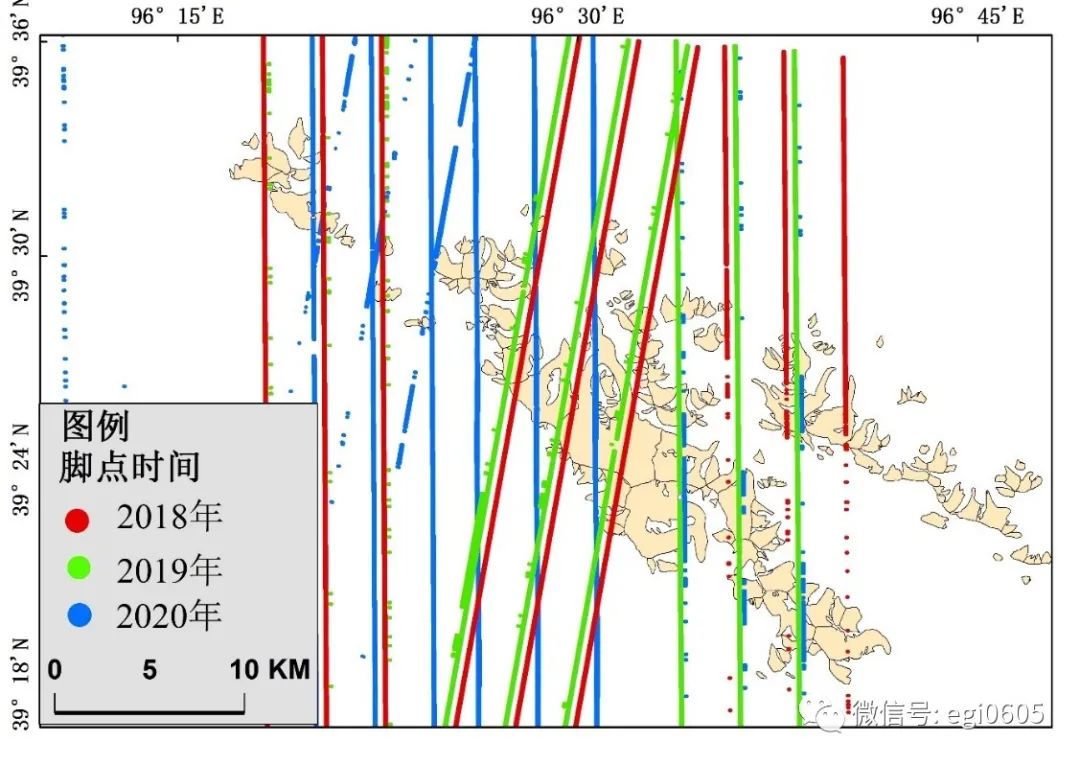
图2 ICESat-2脚点轨迹以及时间
Figure2 trajectory and time of ICESat-2 footpoint
展望:
星载激光高度计因其搭载平台的特殊性,和地面及机载激光测距设备相比,具有许多优势。激光测高技术已有20多年的历史。他的技术已经相当成熟,但随着激光技术的发展和应用需求的扩大,激光测高技术仍有很大的发展空间。激光系统是高频的,随着窄束多光束扫帚的发展,单光子探测技术的发展也可以实现微脉冲距离的测量。未来,随着技术的发展,各种技术问题都将被破坏,激光高度计将有很好的发展和应用前景。未来需要利用时空分辨率更高的遥感影像和以及大量的地面控制点,结合激光高度卫星,以便在空间和时间上覆盖整个研究区域,来获取更精确的计算结果。
#ICESat-2/ATLAS06号陆地表面高程数据的处理与应用就先介绍到这里了,期待下次相见...
这篇关于ICESat-2/ATLAS06卫星数据处理2(附代码)-冰川物质平衡监测的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




