本文主要是介绍Keil5软件仿真 定时器互补通道 波形输出(Logic Analyzer),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
步骤一:管脚配置确认。
①配置定时器的管脚模式为复用推挽输出模式(GPIO_MODE_AF_PP)!!!,注意:复用开漏模式软件仿真时无波形。

步骤二:编译程序。
①点击编译按钮。
②确认无错误、无警告。

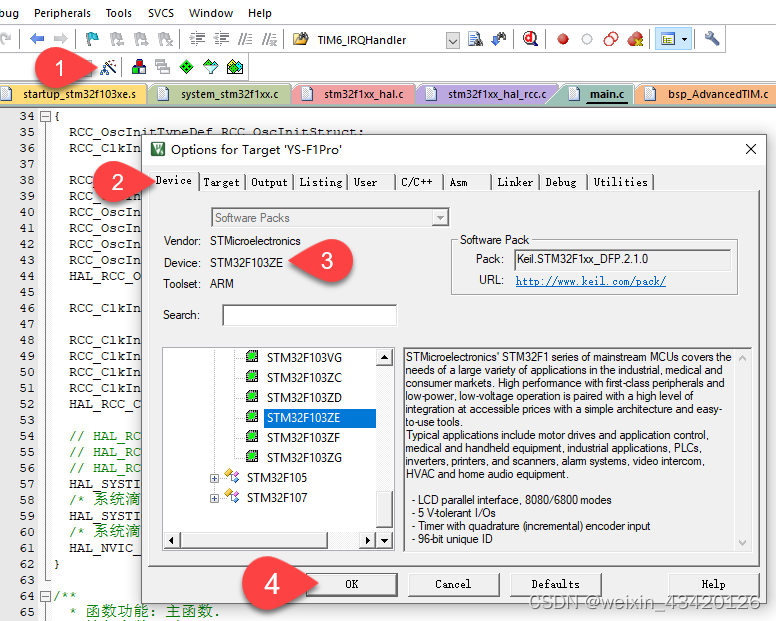
步骤三:确认芯片型号。
①点击魔法棒工具,弹出选项窗口。
②点击Device。
③确认选用的STM32芯片型号(STM32F103ZE)。
④点击OK关闭窗口。
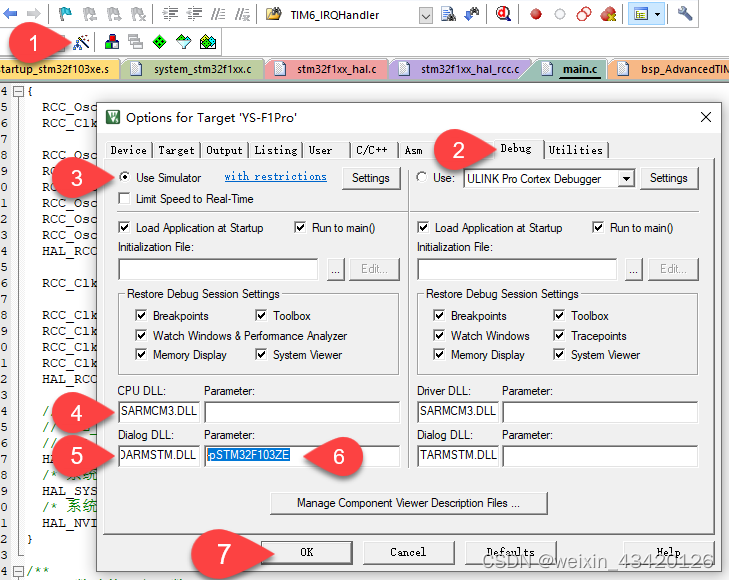
步骤四:软仿真调试工具设置。
①点击魔法棒工具,弹出选项窗口。
②点击Debug。
③选中软件仿真(Use Simulator)。
④设置内核动态链接库(SARMCM3.DLL)。
⑤设置芯片动态链接库(DARMSTM.DLL)。
⑥配置环境变量(-pSTM32F103ZE)。
⑦点击OK关闭窗口。
步骤五:仿真晶振频率设置。
①点击魔法棒工具,弹出选项窗口。
②点击Target。
③设置软件仿真时,模拟外部输出的晶振频率。

步骤六:进入调试模式。
①点击debug按钮进入调试模式。
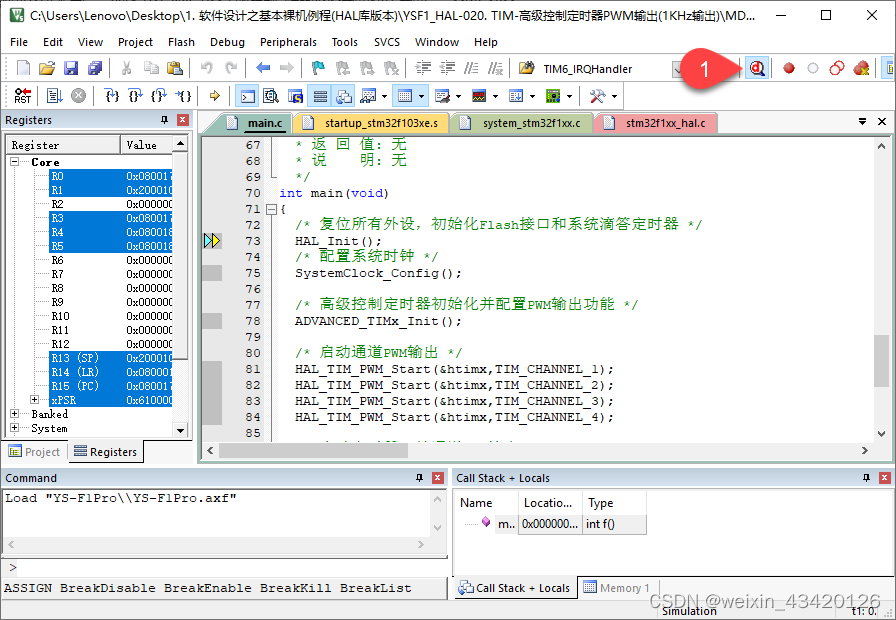
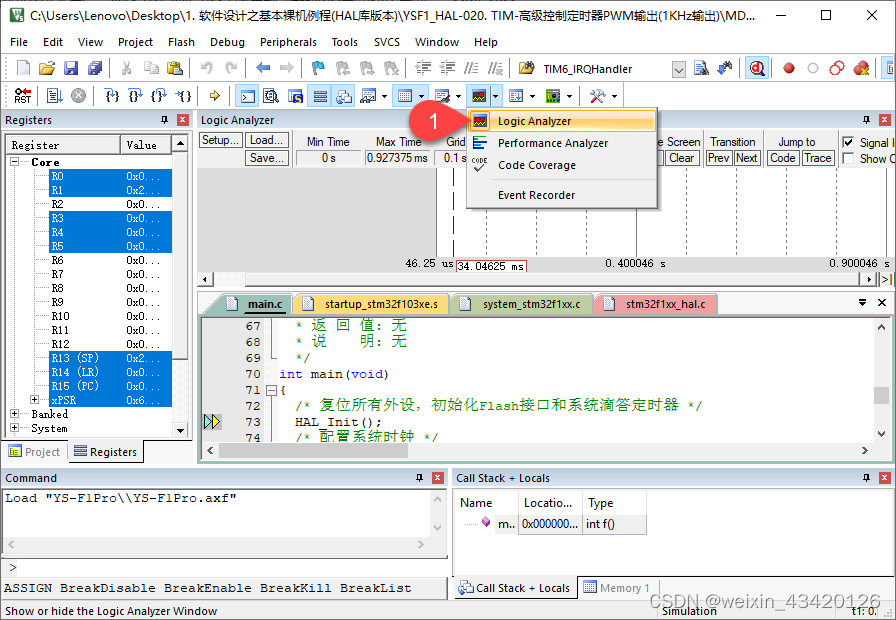
步骤七:打开逻辑分析仪。
①点击逻辑分析仪按钮,打开逻辑分析仪窗口。
步骤八:添加定时器的OC1引脚。
①点击逻辑分析仪的设置按钮,打开设置窗口。
②在设置窗口中点击新建按钮。
③在弹出的列表框中输入定时器配置的OC1的引脚(GPIOA_IDR.8),并点击回车确认。

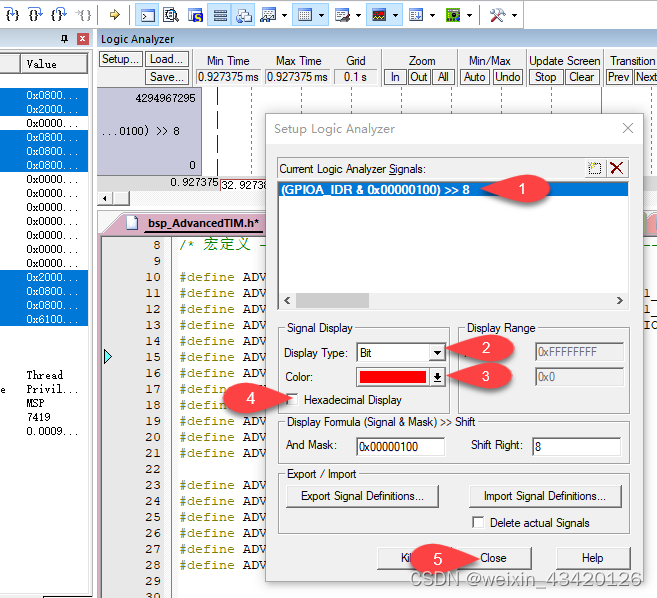
步骤九:OC1引脚相关参数设置。
①选中输入的信号,点击下拉列表。
②设置显示样式为Bit,点击下拉列表。
③可调整显示颜色,选中选择框。
④可显示为十六进制。
(等不及的小伙伴点击仿真运行按钮即可以看到定时器输出引脚OC1的波形)
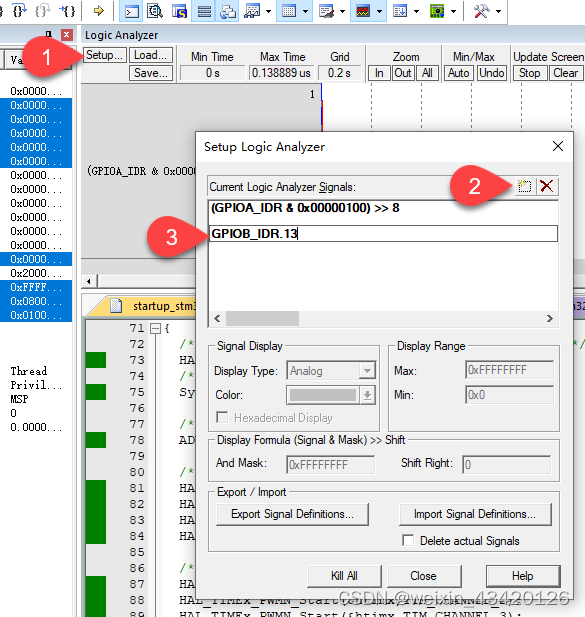
步骤十:添加定时器的OC1N引脚。
①点击逻辑分析仪的设置按钮,打开设置窗口。
②在设置窗口中点击新建按钮。
③在弹出的列表框中输入定时器配置的OC1N的引脚(GPIOB_IDR.13),并点击回车确认。
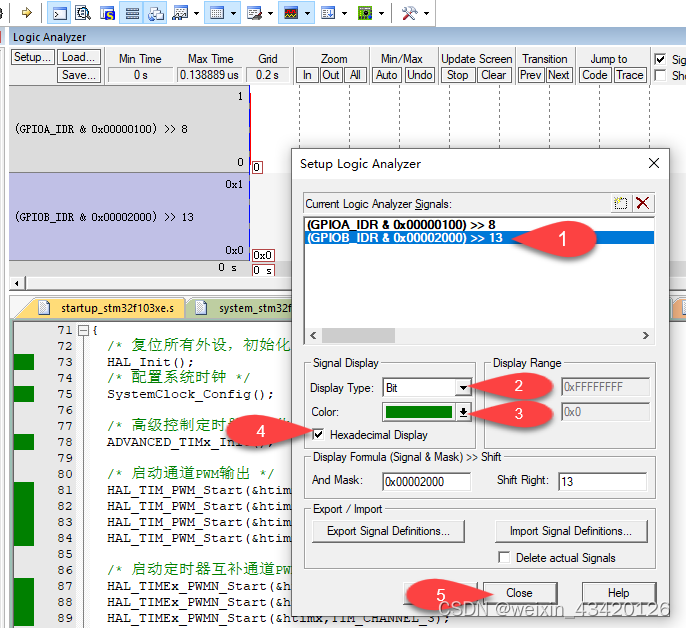
步骤十一:OC1引脚相关参数设置。
①选中输入的信号。
②点击下拉列表设置显示样式为Bit。
③点击下拉列表可调整显示颜色。
④ 选中选择框,显示为十六进制。
⑤点击close关闭对话框。
步骤十二:打开Symbos Window窗口
①点击View菜单栏。
②打开Symbols Window窗口。
③展开Special Function Registers。

步骤十二:TIM1_CNT添加到逻辑分析仪中。
① 从展开的Special Function Registers列表中,找到TIM1_CNT并按住左键拖动到逻辑分析仪中。

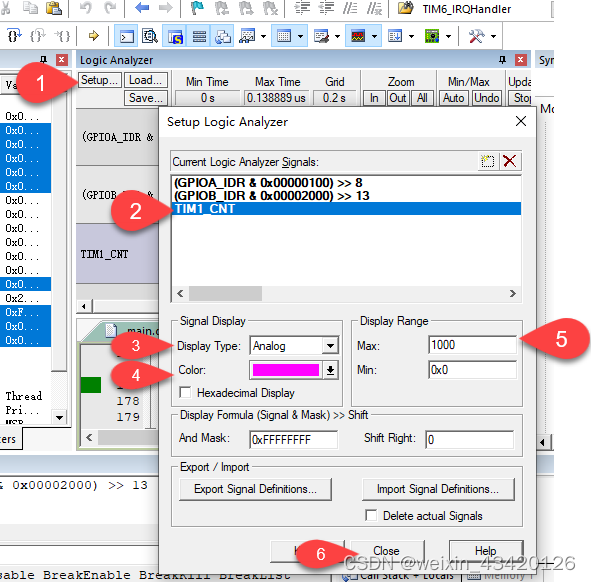
步骤十三:配置TIM1_CNT的相关参数。
①点击逻辑分析仪设置按钮,打开设置对话框。
②选中TIM1_CNT。
③设置显示类型:Analog。
④设置波形颜色。
⑤设置显示范围最大值为定时器1的自动重装载值ARR 1000;最小值默认为0即可。(避免默认 最大值0xFFFFFFFF把数据压缩到地板上)。
⑥点击关闭逻辑分析仪设置窗口。
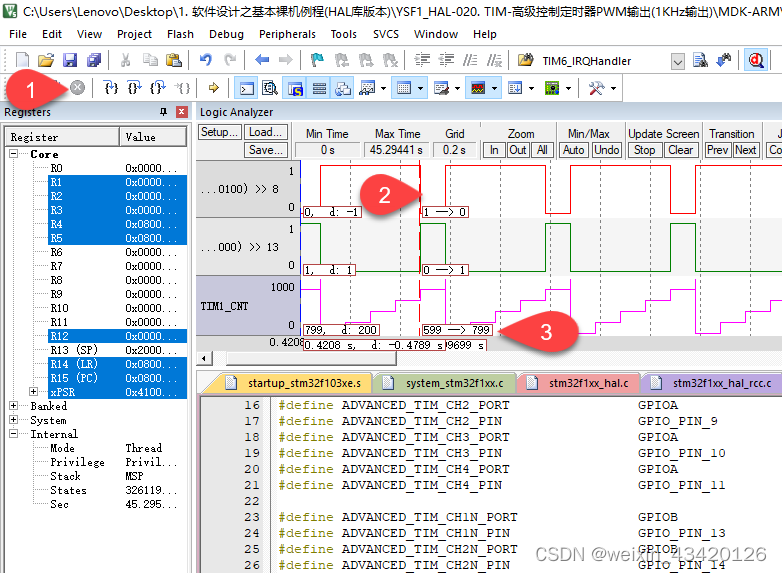
步骤十四:启动仿真。
①点击启动仿真运行按钮。
②可以看到配置的相关波形。

步骤十五:参考仿真结果。
①点击停止按钮。
②点击波形边沿。
③可查看到跳变值为比较值CCR1。
这篇关于Keil5软件仿真 定时器互补通道 波形输出(Logic Analyzer)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!