本文主要是介绍【【迭代16次的CORDIC算法-verilog实现】】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
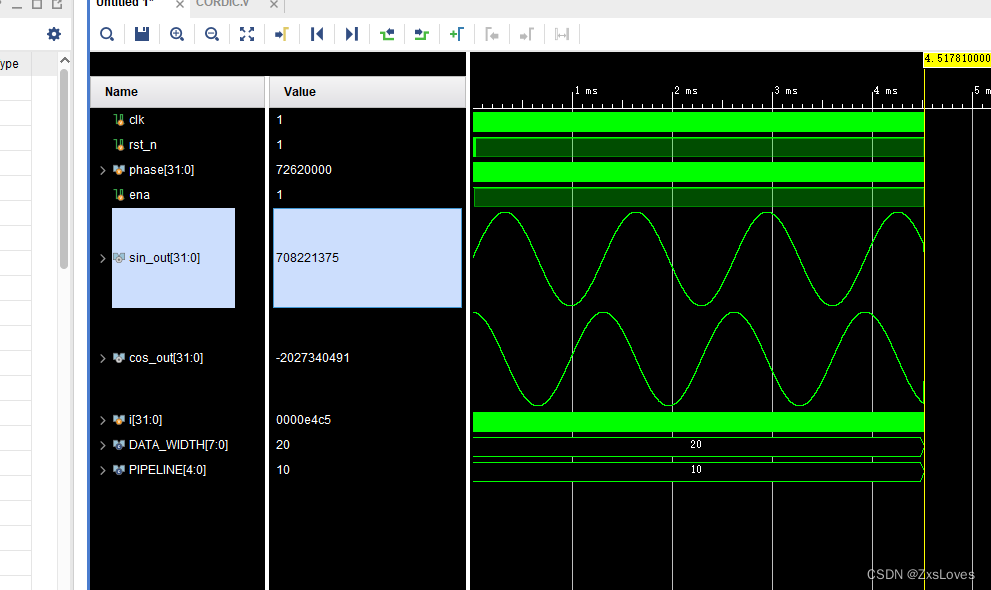
迭代16次的CORDIC算法-verilog实现 -32位迭代16次verilog代码实现
CORDIC.v
module cordic32#(parameter DATA_WIDTH = 8'd32 , // we set data widthparameter PIPELINE = 5'd16 // Optimize waveform)(input clk ,input rst_n ,input signed [DATA_WIDTH - 1 : 0] phase ,input ena ,output reg signed [DATA_WIDTH - 1 : 0] sin_out ,output reg signed [DATA_WIDTH - 1 : 0] cos_out);// ----------------------------------------------- \\// next is define and parameter \\// ------------------------------------------------- \\
reg signed [DATA_WIDTH - 1 : 0] phase_reg ;reg signed [DATA_WIDTH - 1 : 0] phase_reg1 ;reg signed [DATA_WIDTH - 1 : 0] X0 ;reg signed [DATA_WIDTH - 1 : 0] Y0 ;reg signed [DATA_WIDTH - 1 : 0] Z0 ;wire signed [DATA_WIDTH - 1 : 0] X1 , Y1 , Z1 ;wire signed [DATA_WIDTH - 1 : 0] X2 , Y2 , Z2 ;wire signed [DATA_WIDTH - 1 : 0] X3 , Y3 , Z3 ;wire signed [DATA_WIDTH - 1 : 0] X4 , Y4 , Z4 ;wire signed [DATA_WIDTH - 1 : 0] X5 , Y5 , Z5 ;wire signed [DATA_WIDTH - 1 : 0] X6 , Y6 , Z6 ;wire signed [DATA_WIDTH - 1 : 0] X7 , Y7 , Z7 ;wire signed [DATA_WIDTH - 1 : 0] X8 , Y8 , Z8 ;wire signed [DATA_WIDTH - 1 : 0] X9 , Y9 , Z9 ;wire signed [DATA_WIDTH - 1 : 0] X10 , Y10 , Z10 ;wire signed [DATA_WIDTH - 1 : 0] X11 , Y11 , Z11 ;wire signed [DATA_WIDTH - 1 : 0] X12 , Y12 , Z12 ;wire signed [DATA_WIDTH - 1 : 0] X13 , Y13 , Z13 ;wire signed [DATA_WIDTH - 1 : 0] X14 , Y14 , Z14 ;wire signed [DATA_WIDTH - 1 : 0] X15 , Y15 , Z15 ;wire signed [DATA_WIDTH - 1 : 0] X16 , Y16 , Z16 ;reg signed [DATA_WIDTH - 1 : 0] XN15 , YN15 ;reg [1:0] quadrant[PIPELINE : 0] ;integer i ;// We will convert all new angles to the first quadrant//always@(posedge clk or negedge rst_n)beginif( rst_n == 0 )beginphase_reg <= 0 ;phase_reg1 <= 0 ;endelse if( ena == 1)beginphase_reg1 <= phase ;case(phase[DATA_WIDTH - 1 : DATA_WIDTH - 2])2'b00 :phase_reg <= phase ;2'b01 :phase_reg <= phase - 32'h40000000 ; // -902'b10 :phase_reg <= phase - 32'h80000000 ; // -1802'b11 :phase_reg <= phase - 32'hC0000000 ; // -270default :phase_reg <= 32'h00 ; endcaseendend// We begin the initialization operation// we set 0.607253*???2^31-1???,32'h4DBA775Falways@(posedge clk or negedge rst_n)beginif(rst_n == 0 )beginX0 <= 0 ;Y0 <= 0 ;Z0 <= 0 ;endelse if(ena == 1)beginX0 <= 32'h4DBA775F ;Y0 <= 0 ;Z0 <= phase_reg ;endend// for instantiation - 16
INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd0 ),.ANGLE ( 32'h20000000 )
)u_INTERATION0(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X0 ),.Y0 ( Y0 ),.Z0 ( Z0 ),.X1 ( X1 ),.Y1 ( Y1 ),.Z1 ( Z1 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd1 ),.ANGLE ( 32'h12E4051D )
)u_INTERATION1(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X1 ),.Y0 ( Y1 ),.Z0 ( Z1 ),.X1 ( X2 ),.Y1 ( Y2 ),.Z1 ( Z2 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd2 ),.ANGLE ( 32'h09FB385B )
)u_INTERATION2(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X2 ),.Y0 ( Y2 ),.Z0 ( Z2 ),.X1 ( X3 ),.Y1 ( Y3 ),.Z1 ( Z3 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd3 ),.ANGLE ( 32'h051111D4 )
)u_INTERATION3(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X3 ),.Y0 ( Y3 ),.Z0 ( Z3 ),.X1 ( X4 ),.Y1 ( Y4 ),.Z1 ( Z4 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd4 ),.ANGLE ( 32'h028B0D43 )
)u_INTERATION4(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X4 ),.Y0 ( Y4 ),.Z0 ( Z4 ),.X1 ( X5 ),.Y1 ( Y5 ),.Z1 ( Z5 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd5 ),.ANGLE ( 32'h0145D7E1 )
)u_INTERATION5(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X5 ),.Y0 ( Y5 ),.Z0 ( Z5 ),.X1 ( X6 ),.Y1 ( Y6 ),.Z1 ( Z6 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd6 ),.ANGLE ( 32'h00A2F61E )
)u_INTERATION6(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X6 ),.Y0 ( Y6 ),.Z0 ( Z6 ),.X1 ( X7 ),.Y1 ( Y7 ),.Z1 ( Z7 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd7 ),.ANGLE ( 32'h00517C55 )
)u_INTERATION7(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X7 ),.Y0 ( Y7 ),.Z0 ( Z7 ),.X1 ( X8 ),.Y1 ( Y8 ),.Z1 ( Z8 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd8 ),.ANGLE ( 32'h0028BE53 )
)u_INTERATION8(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X8 ),.Y0 ( Y8 ),.Z0 ( Z8 ),.X1 ( X9 ),.Y1 ( Y9 ),.Z1 ( Z9 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd9 ),.ANGLE ( 32'h00145F2F )
)u_INTERATION9(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X9 ),.Y0 ( Y9 ),.Z0 ( Z9 ),.X1 ( X10 ),.Y1 ( Y10 ),.Z1 ( Z10 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd10 ),.ANGLE ( 32'h000A2F98 )
)u_INTERATION10(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X10 ),.Y0 ( Y10 ),.Z0 ( Z10 ),.X1 ( X11 ),.Y1 ( Y11 ),.Z1 ( Z11 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd11 ),.ANGLE ( 32'h000517CC )
)u_INTERATION11(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X11 ),.Y0 ( Y11 ),.Z0 ( Z11 ),.X1 ( X12 ),.Y1 ( Y12 ),.Z1 ( Z12 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd12 ),.ANGLE ( 32'h00028BE6 )
)u_INTERATION12(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X12 ),.Y0 ( Y12 ),.Z0 ( Z12 ),.X1 ( X13 ),.Y1 ( Y13 ),.Z1 ( Z13 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd13 ),.ANGLE ( 32'h000145F3 )
)u_INTERATION13(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X13 ),.Y0 ( Y13 ),.Z0 ( Z13 ),.X1 ( X14 ),.Y1 ( Y14 ),.Z1 ( Z14 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd14 ),.ANGLE ( 32'h0000A2FA )
)u_INTERATION14(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X14 ),.Y0 ( Y14 ),.Z0 ( Z14 ),.X1 ( X15 ),.Y1 ( Y15 ),.Z1 ( Z15 )
);INTERATION#(.DATA_WIDTH ( 8'd32 ),.shift ( 5'd15 ),.ANGLE ( 32'h0000517D )
)u_INTERATION15(.clk ( clk ),.rst_n ( rst_n ),.ena ( ena ),.X0 ( X15 ),.Y0 ( Y15 ),.Z0 ( Z15 ),.X1 ( X16 ),.Y1 ( Y16 ),.Z1 ( Z16 )
);// iteration over always@(posedge clk or negedge rst_n)
beginif(rst_n == 0)for(i = 0 ; i < PIPELINE ; i=i+1)quadrant[i] <= 0 ;elseif(ena == 1)beginfor(i = 0 ; i < PIPELINE ; i=i+1)quadrant[i+1] <= quadrant[i] ;quadrant[0] <= phase_reg1[DATA_WIDTH - 1 : DATA_WIDTH - 2] ;end
end//------------------------------------------ \\//------------------------------------------ \\
// Prevent overflow caused by small decimals and negative complement
//always @(posedge clk or negedge rst_n)if(rst_n == 0)XN15<=0;else if(X15[31:30] == 2'b11)//小于0XN15<=~X15 + 1'b1;else if(X15[31:30] == 2'b10)//大于1XN15<=32'h80000000 - X15 + 32'h80000000;else XN15 <= X15;always @(posedge clk or negedge rst_n )if(rst_n == 0)YN15 <=0;else if(Y15[31:30] == 2'b11)//小于0 YN15 <=~Y15 + 1'b1;else if(Y15[31:30] == 2'b10)//大于1YN15 <=32'h80000000 -Y15 + 32'h80000000;else YN15 <=Y15;//
// The results of different phases are also different// phase[DATA_WIDTH -1 : DATA_WIDTH -2]// 00 first quadrant// 01 second quadrant// 10 third quadrant// 11 Fourth Quadrantalways@(posedge clk or negedge rst_n)
beginif(rst_n == 0)begincos_out <= 0 ;sin_out <= 0 ;endelse if( ena == 1)begincase(quadrant[16]) 2'b00 :begincos_out <= XN15 ;sin_out <= YN15 ;end2'b01 :begincos_out <= ~YN15 + 1'b1;sin_out <= XN15 ;end2'b10 :begincos_out <= ~XN15 + 1'b1 ;sin_out <= ~YN15 + 1'b1 ;end2'b11 :begincos_out <= YN15 ;sin_out <= ~XN15 + 1'b1 ;endendcaseend
end
endmodule
ITERATION.v
module INTERATION #(parameter DATA_WIDTH = 8'd32 ,parameter shift = 5'd0 ,parameter ANGLE = 32'h20000000)(input clk ,input rst_n ,input ena ,input signed [DATA_WIDTH - 1 : 0] X0 ,input signed [DATA_WIDTH - 1 : 0] Y0 ,input signed [DATA_WIDTH - 1 : 0] Z0 ,output reg signed [DATA_WIDTH - 1 : 0] X1 ,output reg signed [DATA_WIDTH - 1 : 0] Y1 ,output reg signed [DATA_WIDTH - 1 : 0] Z1);always@(posedge clk or negedge rst_n)beginif( rst_n == 0)beginX1 <= 0 ;Y1 <= 0 ;Z1 <= 0 ;endelse if( ena == 1)beginif(Z0[DATA_WIDTH - 1] == 0 )begin// X1 <= X0 - {{shift{ Y0[DATA_WIDTH - 1] }} ,Y0[DATA_WIDTH - 1 : shift] } ;// Y1 <= Y0 + {{shift{ X0[DATA_WIDTH - 1] }} ,X0[DATA_WIDTH - 1 : shift] } ;X1 <= X0 - (Y0>>>shift);Y1 <= Y0 + (X0>>>shift);Z1 <= Z0 - ANGLE ;endelse if(Z0[DATA_WIDTH - 1] == 1 )begin//X1 <= X0 + {{shift{ Y0[DATA_WIDTH - 1 ] }} ,Y0[DATA_WIDTH - 1 : shift] } ;// Y1 <= Y0 - {{shift{ X0[DATA_WIDTH - 1 ] }} ,X0[DATA_WIDTH - 1 : shift] } ;X1 <= X0 + (Y0>>>shift) ;Y1 <= Y0 - {X0>>>shift} ;Z1 <= Z0 + ANGLE ;endendendendmodule
CORDIC_tb.v
module cordic_tb #(parameter DATA_WIDTH = 8'd32 , // we set data widthparameter PIPELINE = 5'd16 // Optimize waveform
);
reg clk ;
reg rst_n ;
reg [DATA_WIDTH - 1 : 0] phase ;
reg ena ;
wire [DATA_WIDTH - 1 : 0] sin_out ;
wire [DATA_WIDTH - 1 : 0] cos_out ;integer i;
cordic32#(.DATA_WIDTH ( DATA_WIDTH ),.PIPELINE ( PIPELINE )
)u_cordic32(.clk ( clk ),.rst_n ( rst_n ),.phase ( phase ),.ena ( ena ),.sin_out ( sin_out ),.cos_out ( cos_out )
);initial
begin#0 clk = 1'b0;ena = 1'b1 ;#10 rst_n = 1'b0;#10 rst_n = 1'b1;#20000000 $stop;
end initial
beginrepeat(10)begin#0 phase = 32'd0;for(i=0;i<131072;i=i+1)begin#10;phase <= phase + 32'h8000;endend
end
always #10
beginclk = ~clk;
endendmodule
README.md
在完成CORDIC的7次迭代之后 我在思考一个问题 8位进行了7次迭代 最后迭代至0号称没有误差了
我们是否可以通过 扩展至32位 进行多次迭代 将误差不断的缩小 本次数据参考至 网上的其他教程 我并没有自己去计算 我把结构优化一下 修改成更加便于理解使用的形式还有一件事 是 进制 与 Π 转化的问题
对于 8位 其实我们 一开始将Π 设定为 1000_0000
那么对于 Π/4 是否就是1000_0000 的 四分之一 对于二进制 其实就是整体的数字进行移位
我们将1000_0000 移动至 0010_0000 于此 而对于 32位我们32'h8000000 就是一个Π
而 32’h2000_0000 就是四分之Π 还有一件事 说明 我在写例化的时候 将数据完全完整的例化了下来 写的很长 这样并不是很好
后面学习中 我看别人是 这么处理的
genvar die;
generatefor (die = 0; die <Pipeline; die=die+1)begin: dieLoopalways @(posedge CLK_SYS or negedge RST_N)if (!RST_N) beginxn[die+1] <= 32'h0;yn[die+1] <= 32'h0;zn[die+1] <= 32'h0;endelse begin if(zn[die][31]==1'b0)//角度符号判断beginxn[die+1] <= xn[die] - (yn[die]>>>die);yn[die+1] <= yn[die] + (xn[die]>>>die);zn[die+1] <= zn[die] - rot[die]; endelse beginxn[die+1] <= xn[die] + (yn[die]>>>die);yn[die+1] <= yn[die] - (xn[die]>>>die);zn[die+1] <= zn[die] + rot[die]; endendend
endgenerate# 还有一件事 对于溢出的考量
我们所作溢出的考量 其实我们设定了32'h8000_0000 这既是Π的值 也是 1的设定
但是在实际的运用和计算中 我们其实永远也达不到1 嘿嘿
因为我们把最高位设计成了 符号位
那么最大 也就是1 我们约等于 32'h7fff_ffff
这里需要注意的是[31:28] 是 7 也就是0111 非常重要的一个结论 我们最高位0代表了符号位
那么对于设计到第一象限的[31:30] 的值可以取 00 01 但是 10 11我们要对其进行合适的转化
所以便有了我们 对溢出的操作 always @(posedge clk or negedge rst_n)if(rst_n == 0)XN15<=0;else if(X15[31:30] == 2'b11)//小于0XN15<=~X15 + 1'b1;else if(X15[31:30] == 2'b10)//大于1XN15<=32'h80000000 - X15 + 32'h80000000;else XN15 <= X15;always @(posedge clk or negedge rst_n )if(rst_n == 0)YN15 <=0;else if(Y15[31:30] == 2'b11)//小于0 YN15 <=~Y15 + 1'b1;else if(Y15[31:30] == 2'b10)//大于1YN15 <=32'h80000000 -Y15 + 32'h80000000;else YN15 <=Y15;注意在设计的时候 定义成reg signed 的形式 将其设计为有符号位
这篇关于【【迭代16次的CORDIC算法-verilog实现】】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





