本文主要是介绍新品|带同轴光远心镜头发布,专攻小物体高精度检测,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
远心镜头,因其高精密、低畸变的特性,在工业制造领域检测中有着广泛应用。但在使用远心镜头对小工件进行视觉检测的过程中,由于被测产品尺寸小、产品材质特性、空间限制等因素,往往存在以下问题:
视觉系统难部署
由于被测产品尺寸较小、生产设备空间有限,在采用常规视觉部件(相机、镜头、光源)部署图像采集时会面临安装困难。
检测精度不达标
对于小体积、易反光材质的产品,普通的打光方式容易导致照度不均匀,从而影响检测精度。
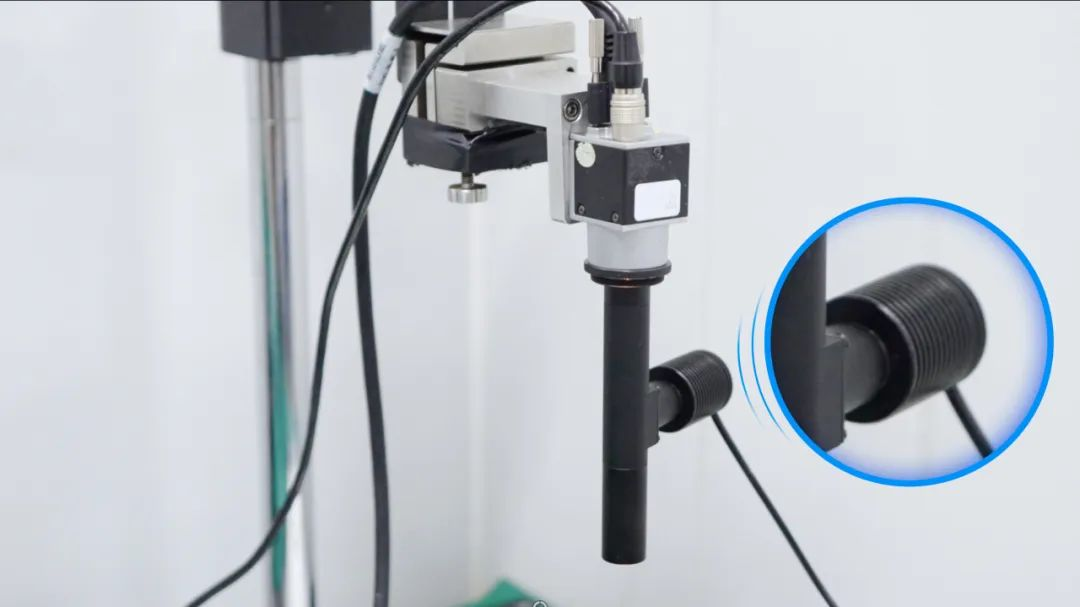
为解决现有远心镜头检测系统存在的上述问题,维视智造最新推出了BT-TML15X150C、BT-TML20X150C带同轴光物方远心镜头。该产品具有高分辨率、低畸变,小体积、大孔径等特点,并特别设计自带同轴光源,通过使用分光棱镜将远心照明光路、远心成像光路整合为一体,为细微特征的高精度检测提供光学性能更优的镜头选择。
产品亮点
1.一个顶俩 降本增效
镜头内嵌同轴光源,无需再额外配备光源,降低了硬件成本;系统布局更加灵活,节省安装空间,降低部署成本。
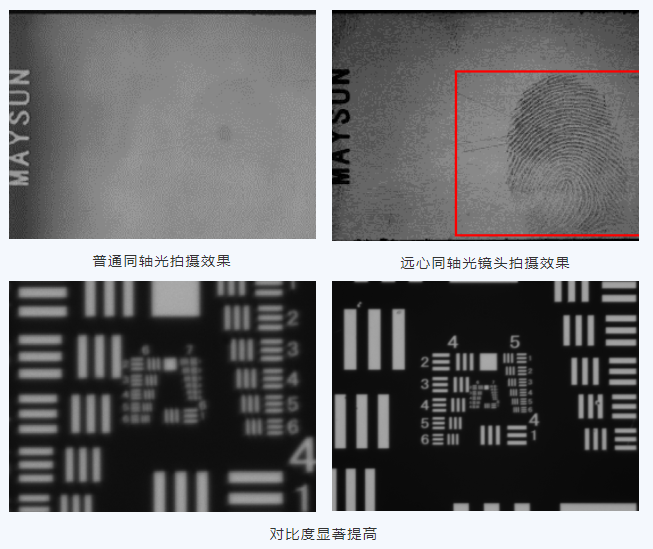
2.均匀光照 立显瑕疵
镜头采用分光棱镜的特殊优化和大孔径设计,提高光的透过率,使照度更均匀,消除图像渐晕。分辨率高达 8.3µm,镜头全视场测量重复精度±0.001mm,能够捕捉到微小的细节,使成像对比度更高、更清晰。
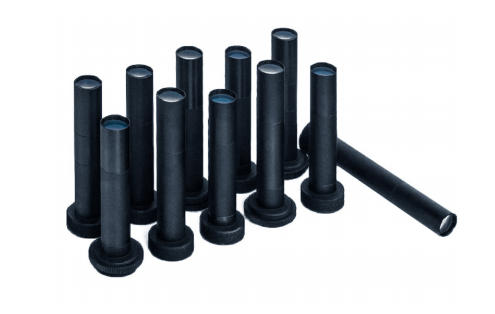
3. 轻量化设计
BT-TML15X150C、BT-TML20X150C产品轻量紧凑,适用于狭小空间视觉检测。

4.系列产品 更灵活适配
维视智造BT-TML系列物方远心镜头覆盖1X-6X多种倍率,65mm、110mm、150mm多个工作距离,最大匹配 1/1.8″靶面工业相机,可根据客户的实际生产需求量身定制解决方案。
应用示例

高反光小型物体缺陷(污点/划痕/凹凸点等)检测

易反射材料(玻璃、金属等)表面检测
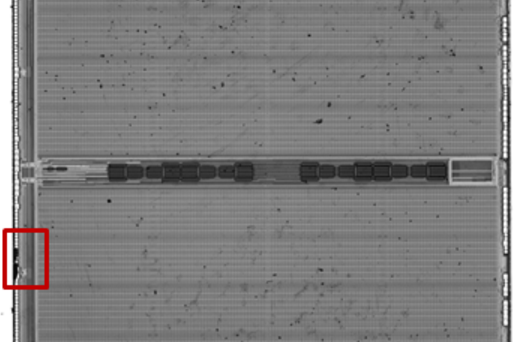
芯片和硅晶片缺陷(污点/划痕/凹凸点等)检测
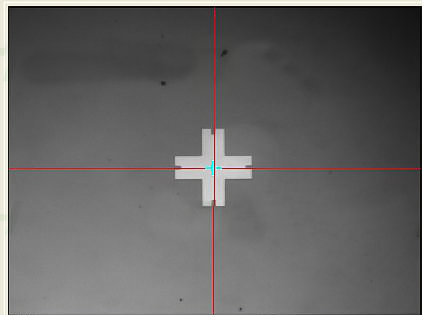
MARK点定位
关注公众号【维视智造股份】免费获取《远心光学系列产品应用选型指南》
这篇关于新品|带同轴光远心镜头发布,专攻小物体高精度检测的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








