本文主要是介绍【ros2 control 机器人驱动开发】简单双关节机器人学习-example 1,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
【ros2 control 机器人驱动开发】简单双关节机器人学习-example 1
文章目录
- 前言
- 一、RR机器人
- 创建description pkg
- 创建demos pkg
- 二、创建controller相关
- 创建example pkg
- 三、测试运行
- 总结
前言
本系列文件主要有以下目标和内容:
- 为系统、传感器和执行器创建
HardwareInterface - 以URDF文件的形式创建机器人描述
- 加载配置并使用启动文件启动机器人
- 控制RRBot的两个关节(两旋转关节机器人)
- 六自由度机器人的控制
- 实现机器人的控制器切换策略
- 使用
ros2_control中的关节限制和传输概念
一、RR机器人
RRBot( Revolute-Revolute Manipulator Robot)是一个简单的3连杆,2关节的机械臂,我们将使用它来演示各种功能。
它本质上是一个双倒立摆,并在模拟器中演示了一些有趣的控制概念,最初是为Gazebo教程介绍的。
创建description pkg
这里主要是完成机器人描述文件的创建,各个轴的物理尺寸、模型信息,各个轴的关节链接方式、链接点。
mkdir ~/ros2_control_demos
cd ~/ros2_control_demosros2 pkg create --build-type ament_cmake ros2_control_demo_description# 文件结构
$ tree ros2_control_demo_description/
ros2_control_demo_description/
├── CMakeLists.txt
├── package.xml
└── rrbot├── rviz│ └── rrbot.rviz└── urdf├── rrbot.materials.xacro└── rrbot_description.urdf.xacro
# CMakeLists.txtcmake_minimum_required(VERSION 3.8)
project(ros2_control_demo_description)if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")add_compile_options(-Wall -Wextra -Wpedantic)
endif()# find dependencies
find_package(ament_cmake REQUIRED)install(DIRECTORY rrbot/urdf rrbot/rvizDESTINATION share/${PROJECT_NAME}/rrbot
)ament_package()
# packages.xml<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3"><name>ros2_control_demo_description</name><version>0.0.0</version><description>TODO: Package description</description><maintainer email="https://blog.csdn.net/Bing_Lee">dev</maintainer><license>TODO: License declaration</license><buildtool_depend>ament_cmake</buildtool_depend><exec_depend>joint_state_publisher_gui</exec_depend><exec_depend>robot_state_publisher</exec_depend><exec_depend>rviz2</exec_depend>
</package>
# rrbot.rvizPanels:- Class: rviz_common/DisplaysHelp Height: 87Name: DisplaysProperty Tree Widget:Expanded: ~Splitter Ratio: 0.5Tree Height: 1096- Class: rviz_common/SelectionName: Selection- Class: rviz_common/Tool PropertiesExpanded:- /2D Goal Pose1- /Publish Point1Name: Tool PropertiesSplitter Ratio: 0.5886790156364441- Class: rviz_common/ViewsExpanded:- /Current View1Name: ViewsSplitter Ratio: 0.5
Visualization Manager:Class: ""Displays:- Alpha: 0.5Cell Size: 1Class: rviz_default_plugins/GridColor: 160; 160; 164Enabled: trueLine Style:Line Width: 0.029999999329447746Value: LinesName: GridNormal Cell Count: 0Offset:X: 0Y: 0Z: 0Plane: XYPlane Cell Count: 10Reference Frame: <Fixed Frame>Value: true- Alpha: 1Class: rviz_default_plugins/RobotModelCollision Enabled: falseDescription File: ""Description Source: TopicDescription Topic:Depth: 5Durability Policy: VolatileHistory Policy: Keep LastReliability Policy: ReliableValue: /robot_descriptionEnabled: trueLinks:All Links Enabled: trueExpand Joint Details: falseExpand Link Details: falseExpand Tree: falseLink Tree Style: Links in Alphabetic Orderbase_link:Alpha: 1Show Axes: falseShow Trail: falseValue: truecamera_link:Alpha: 1Show Axes: falseShow Trail: falseValue: truecamera_link_optical:Alpha: 1Show Axes: falseShow Trail: falsehokuyo_link:Alpha: 1Show Axes: falseShow Trail: falseValue: truelink1:Alpha: 1Show Axes: falseShow Trail: falseValue: truelink2:Alpha: 1Show Axes: falseShow Trail: falseValue: truetool_link:Alpha: 1Show Axes: falseShow Trail: falseworld:Alpha: 1Show Axes: falseShow Trail: falseMass Properties:Inertia: falseMass: falseName: RobotModelTF Prefix: ""Update Interval: 0Value: trueVisual Enabled: trueEnabled: trueGlobal Options:Background Color: 48; 48; 48Fixed Frame: base_linkFrame Rate: 30Name: rootTools:- Class: rviz_default_plugins/InteractHide Inactive Objects: true- Class: rviz_default_plugins/MoveCamera- Class: rviz_default_plugins/Select- Class: rviz_default_plugins/FocusCamera- Class: rviz_default_plugins/MeasureLine color: 128; 128; 0- Class: rviz_default_plugins/SetInitialPoseCovariance x: 0.25Covariance y: 0.25Covariance yaw: 0.06853891909122467Topic:Depth: 5Durability Policy: VolatileHistory Policy: Keep LastReliability Policy: ReliableValue: /initialpose- Class: rviz_default_plugins/SetGoalTopic:Depth: 5Durability Policy: VolatileHistory Policy: Keep LastReliability Policy: ReliableValue: /goal_pose- Class: rviz_default_plugins/PublishPointSingle click: trueTopic:Depth: 5Durability Policy: VolatileHistory Policy: Keep LastReliability Policy: ReliableValue: /clicked_pointTransformation:Current:Class: rviz_default_plugins/TFValue: trueViews:Current:Class: rviz_default_plugins/OrbitDistance: 8.443930625915527Enable Stereo Rendering:Stereo Eye Separation: 0.05999999865889549Stereo Focal Distance: 1Swap Stereo Eyes: falseValue: falseFocal Point:X: 0.0044944556429982185Y: 1.0785865783691406Z: 2.4839563369750977Focal Shape Fixed Size: trueFocal Shape Size: 0.05000000074505806Invert Z Axis: falseName: Current ViewNear Clip Distance: 0.009999999776482582Pitch: 0.23039916157722473Target Frame: <Fixed Frame>Value: Orbit (rviz)Yaw: 5.150422096252441Saved: ~
Window Geometry:Displays:collapsed: falseHeight: 1379Hide Left Dock: falseHide Right Dock: falseSelection:collapsed: falseTool Properties:collapsed: falseViews:collapsed: falseWidth: 2560X: 0Y: 1470
# rrbot_description.urdf.xacro<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro"><xacro:macro name="rrbot" params="parent prefix *origin"><!-- Constants for robot dimensions --><xacro:property name="mass" value="1" /> <!-- arbitrary value for mass --><xacro:property name="width" value="0.1" /> <!-- Square dimensions (widthxwidth) of beams --><xacro:property name="height1" value="2" /> <!-- Link 1 --><xacro:property name="height2" value="1" /> <!-- Link 2 --><xacro:property name="height3" value="1" /> <!-- Link 3 --><xacro:property name="axel_offset" value="0.05" /> <!-- Space btw top of beam and the each joint --><joint name="${prefix}base_joint" type="fixed"><xacro:insert_block name="origin" /><parent link="${parent}"/><child link="${prefix}base_link" /></joint><!-- Base Link --><link name="${prefix}base_link"><collision><origin xyz="0 0 ${height1/2}" rpy="0 0 0"/><geometry><box size="${width} ${width} ${height1}"/></geometry></collision><visual><origin xyz="0 0 ${height1/2}" rpy="0 0 0"/><geometry><box size="${width} ${width} ${height1}"/></geometry><material name="orange"/></visual></link><joint name="${prefix}joint1" type="continuous"><parent link="${prefix}base_link"/><child link="${prefix}link1"/><origin xyz="0 ${width} ${height1 - axel_offset}" rpy="0 0 0"/><axis xyz="0 1 0"/><dynamics damping="0.7"/></joint><!-- Middle Link --><link name="${prefix}link1"><collision><origin xyz="0 0 ${height2/2 - axel_offset}" rpy="0 0 0"/><geometry><box size="${width} ${width} ${height2}"/></geometry></collision><visual><origin xyz="0 0 ${height2/2 - axel_offset}" rpy="0 0 0"/><geometry><box size="${width} ${width} ${height2}"/></geometry><material name="yellow"/></visual></link><joint name="${prefix}joint2" type="continuous"><parent link="${prefix}link1"/><child link="${prefix}link2"/><origin xyz="0 ${width} ${height2 - axel_offset*2}" rpy="0 0 0"/><axis xyz="0 1 0"/><dynamics damping="0.7"/></joint><!-- Top Link --><link name="${prefix}link2"><collision><origin xyz="0 0 ${height3/2 - axel_offset}" rpy="0 0 0"/><geometry><box size="${width} ${width} ${height3}"/></geometry></collision><visual><origin xyz="0 0 ${height3/2 - axel_offset}" rpy="0 0 0"/><geometry><box size="${width} ${width} ${height3}"/></geometry><material name="orange"/></visual></link><joint name="${prefix}tool_joint" type="fixed"><origin xyz="0 0 1" rpy="0 0 0" /><parent link="${prefix}link2"/><child link="${prefix}tool_link" /></joint><!-- Tool Link --><link name="${prefix}tool_link"></link></xacro:macro></robot>
# rrbot.materials.xacro
<?xml version="1.0"?>
<!--
Copied from ROS1 example -
https://github.com/ros-simulation/gazebo_ros_demos/blob/kinetic-devel/rrbot_description/urdf/materials.xacro
-->
<robot><material name="black"><color rgba="0.0 0.0 0.0 1.0"/></material><material name="blue"><color rgba="0.0 0.0 0.8 1.0"/></material><material name="green"><color rgba="0.0 0.8 0.0 1.0"/></material><material name="grey"><color rgba="0.2 0.2 0.2 1.0"/></material><material name="orange"><color rgba="${255/255} ${108/255} ${10/255} 1.0"/></material><material name="brown"><color rgba="${222/255} ${207/255} ${195/255} 1.0"/></material><material name="red"><color rgba="0.8 0.0 0.0 1.0"/></material><material name="yellow"><color rgba="1.0 1.0 0.0 1.0"/></material><material name="white"><color rgba="1.0 1.0 1.0 1.0"/></material></robot>
创建demos pkg
这个包用于引导编译所有相关依赖包,按照下边格式填好即可。
cd ~/ros2_control_demosros2 pkg create --build-type ament_cmake ros2_control_demos# 文件结构
$ tree ros2_control_demos/
ros2_control_demos/
├── CMakeLists.txt
└── package.xml
# CMakeLists.txtcmake_minimum_required(VERSION 3.8)
project(ros2_control_demos)# find dependencies
find_package(ament_cmake REQUIRED)ament_package()
# package.xml<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3"><name>ros2_control_demos</name><version>0.0.0</version><description>TODO: Package description</description><maintainer email="https://blog.csdn.net/Bing_Lee">dev</maintainer><license>TODO: License declaration</license><buildtool_depend>ament_cmake</buildtool_depend><exec_depend>ros2_control_demo_example_1</exec_depend><export><build_type>ament_cmake</build_type></export>
</package>
二、创建controller相关
创建example pkg
cd ~/ros2_control_demosros2 pkg create --build-type ament_cmake ros2_control_demo_example_1
这里涉及hardware部分的实现,具体如下:
# robot.hpp// Copyright 2020 ros2_control Development Team
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.#ifndef ROS2_CONTROL_DEMO_EXAMPLE_1__RRBOT_HPP_
#define ROS2_CONTROL_DEMO_EXAMPLE_1__RRBOT_HPP_#include <memory>
#include <string>
#include <vector>#include "hardware_interface/handle.hpp"
#include "hardware_interface/hardware_info.hpp"
#include "hardware_interface/system_interface.hpp"
#include "hardware_interface/types/hardware_interface_return_values.hpp"
#include "rclcpp/macros.hpp"
#include "rclcpp_lifecycle/node_interfaces/lifecycle_node_interface.hpp"
#include "rclcpp_lifecycle/state.hpp"
#include "ros2_control_demo_example_1/visibility_control.h"namespace ros2_control_demo_example_1
{
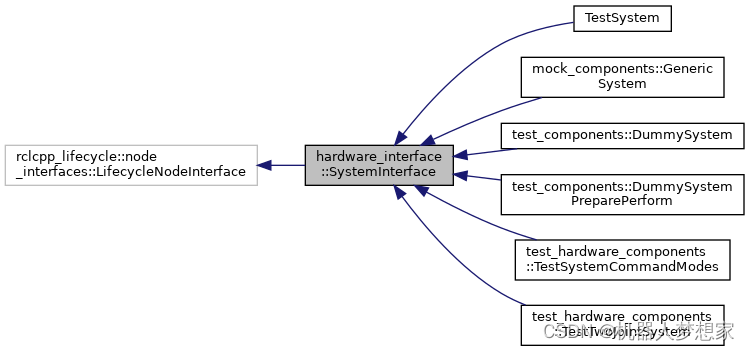
class RRBotSystemPositionOnlyHardware : public hardware_interface::SystemInterface
{
public:RCLCPP_SHARED_PTR_DEFINITIONS(RRBotSystemPositionOnlyHardware);ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIChardware_interface::CallbackReturn on_init(const hardware_interface::HardwareInfo & info) override;ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIChardware_interface::CallbackReturn on_configure(const rclcpp_lifecycle::State & previous_state) override;ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLICstd::vector<hardware_interface::StateInterface> export_state_interfaces() override;ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLICstd::vector<hardware_interface::CommandInterface> export_command_interfaces() override;ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIChardware_interface::CallbackReturn on_activate(const rclcpp_lifecycle::State & previous_state) override;ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIChardware_interface::CallbackReturn on_deactivate(const rclcpp_lifecycle::State & previous_state) override;ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIChardware_interface::return_type read(const rclcpp::Time & time, const rclcpp::Duration & period) override;ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIChardware_interface::return_type write(const rclcpp::Time & time, const rclcpp::Duration & period) override;private:// Parameters for the RRBot simulationdouble hw_start_sec_;double hw_stop_sec_;double hw_slowdown_;// Store the command for the simulated robotstd::vector<double> hw_commands_;std::vector<double> hw_states_;
};} // namespace ros2_control_demo_example_1#endif // ROS2_CONTROL_DEMO_EXAMPLE_1__RRBOT_HPP_
// Copyright 2021 ros2_control Development Team
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License./* This header must be included by all rclcpp headers which declare symbols* which are defined in the rclcpp library. When not building the rclcpp* library, i.e. when using the headers in other package's code, the contents* of this header change the visibility of certain symbols which the rclcpp* library cannot have, but the consuming code must have inorder to link.*/#ifndef ROS2_CONTROL_DEMO_EXAMPLE_1__VISIBILITY_CONTROL_H_
#define ROS2_CONTROL_DEMO_EXAMPLE_1__VISIBILITY_CONTROL_H_// This logic was borrowed (then namespaced) from the examples on the gcc wiki:
// https://gcc.gnu.org/wiki/Visibility#if defined _WIN32 || defined __CYGWIN__
#ifdef __GNUC__
#define ROS2_CONTROL_DEMO_EXAMPLE_1_EXPORT __attribute__((dllexport))
#define ROS2_CONTROL_DEMO_EXAMPLE_1_IMPORT __attribute__((dllimport))
#else
#define ROS2_CONTROL_DEMO_EXAMPLE_1_EXPORT __declspec(dllexport)
#define ROS2_CONTROL_DEMO_EXAMPLE_1_IMPORT __declspec(dllimport)
#endif
#ifdef ROS2_CONTROL_DEMO_EXAMPLE_1_BUILDING_DLL
#define ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC ROS2_CONTROL_DEMO_EXAMPLE_1_EXPORT
#else
#define ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC ROS2_CONTROL_DEMO_EXAMPLE_1_IMPORT
#endif
#define ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC_TYPE ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC
#define ROS2_CONTROL_DEMO_EXAMPLE_1_LOCAL
#else
#define ROS2_CONTROL_DEMO_EXAMPLE_1_EXPORT __attribute__((visibility("default")))
#define ROS2_CONTROL_DEMO_EXAMPLE_1_IMPORT
#if __GNUC__ >= 4
#define ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC __attribute__((visibility("default")))
#define ROS2_CONTROL_DEMO_EXAMPLE_1_LOCAL __attribute__((visibility("hidden")))
#else
#define ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC
#define ROS2_CONTROL_DEMO_EXAMPLE_1_LOCAL
#endif
#define ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC_TYPE
#endif#endif // ROS2_CONTROL_DEMO_EXAMPLE_1__VISIBILITY_CONTROL_H_attribute((visibility(“default”))) 是 GCC(GNU 编译器集合)中的一个特性,它允许程序员控制特定部分的代码的可见性。在 C 和 C++ 中,代码的可见性是指其他源文件能否访问特定的函数或变量。
当你在一个函数或变量声明中使用 attribute((visibility(“default”))),表示这个函数或变量默认对所有其他源文件可见。也就是说,这个函数或变量可以在其他源文件中被调用,或者被其他源文件中的变量间接引用。
这种特性在编写库和模块时非常有用,因为它允许程序员更灵活地组织和隐藏代码。例如,你可以创建一个库,其中包含一些默认可见的函数和变量,这些函数和变量可以被其他源文件调用,但不被直接暴露给用户。这种方式可以隐藏库的内部实现细节,同时仍然允许用户使用库的功能。
需要注意的是,attribute((visibility(“default”))) 并不是 C 或 C++ 标准的一部分,而是 GCC 编译器的一个特性。这意味着不是所有的编译器都会支持这个特性,特别是那些不支持 GCC 的编译器。此外,不同的编译器可能对 attribute((visibility)) 的行为有微小的差异,所以在使用这个特性时需要特别小心。
# robot.cpp// Copyright 2020 ros2_control Development Team
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.#include "ros2_control_demo_example_1/rrbot.hpp"#include <chrono>
#include <cmath>
#include <limits>
#include <memory>
#include <vector>#include "hardware_interface/types/hardware_interface_type_values.hpp"
#include "rclcpp/rclcpp.hpp"namespace ros2_control_demo_example_1
{
hardware_interface::CallbackReturn RRBotSystemPositionOnlyHardware::on_init(const hardware_interface::HardwareInfo & info)
{if (hardware_interface::SystemInterface::on_init(info) !=hardware_interface::CallbackReturn::SUCCESS){return hardware_interface::CallbackReturn::ERROR;}// BEGIN: 这一段是出测试使用考虑,请勿拷贝至实际生产环境hw_start_sec_ = stod(info_.hardware_parameters["example_param_hw_start_duration_sec"]);hw_stop_sec_ = stod(info_.hardware_parameters["example_param_hw_stop_duration_sec"]);hw_slowdown_ = stod(info_.hardware_parameters["example_param_hw_slowdown"]);// END: 这一段是出测试使用考虑,请勿拷贝至实际生产环境hw_states_.resize(info_.joints.size(), std::numeric_limits<double>::quiet_NaN());hw_commands_.resize(info_.joints.size(), std::numeric_limits<double>::quiet_NaN());for (const hardware_interface::ComponentInfo & joint : info_.joints){// RRBotSystemPositionOnly 只有一种状态和命令(state,command)if (joint.command_interfaces.size() != 1){RCLCPP_FATAL(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"),"Joint '%s' has %zu command interfaces found. 1 expected.", joint.name.c_str(),joint.command_interfaces.size());return hardware_interface::CallbackReturn::ERROR;}if (joint.command_interfaces[0].name != hardware_interface::HW_IF_POSITION){RCLCPP_FATAL(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"),"Joint '%s' have %s command interfaces found. '%s' expected.", joint.name.c_str(),joint.command_interfaces[0].name.c_str(), hardware_interface::HW_IF_POSITION);return hardware_interface::CallbackReturn::ERROR;}if (joint.state_interfaces.size() != 1){RCLCPP_FATAL(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"),"Joint '%s' has %zu state interface. 1 expected.", joint.name.c_str(),joint.state_interfaces.size());return hardware_interface::CallbackReturn::ERROR;}if (joint.state_interfaces[0].name != hardware_interface::HW_IF_POSITION){RCLCPP_FATAL(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"),"Joint '%s' have %s state interface. '%s' expected.", joint.name.c_str(),joint.state_interfaces[0].name.c_str(), hardware_interface::HW_IF_POSITION);return hardware_interface::CallbackReturn::ERROR;}}return hardware_interface::CallbackReturn::SUCCESS;
}hardware_interface::CallbackReturn RRBotSystemPositionOnlyHardware::on_configure(const rclcpp_lifecycle::State & /*previous_state*/)
{// BEGIN: 这一段是出测试使用考虑,请勿拷贝至实际生产环境RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Configuring ...please wait...");for (int i = 0; i < hw_start_sec_; i++){rclcpp::sleep_for(std::chrono::seconds(1));RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "%.1f seconds left...",hw_start_sec_ - i);}// END: 这一段是出测试使用考虑,请勿拷贝至实际生产环境// 在切换状态到configure时总是初始化所有值for (uint i = 0; i < hw_states_.size(); i++){hw_states_[i] = 0;hw_commands_[i] = 0;}RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Successfully configured!");return hardware_interface::CallbackReturn::SUCCESS;
}std::vector<hardware_interface::StateInterface>
RRBotSystemPositionOnlyHardware::export_state_interfaces()
{std::vector<hardware_interface::StateInterface> state_interfaces;for (uint i = 0; i < info_.joints.size(); i++){state_interfaces.emplace_back(hardware_interface::StateInterface(info_.joints[i].name, hardware_interface::HW_IF_POSITION, &hw_states_[i]));}return state_interfaces;
}std::vector<hardware_interface::CommandInterface>
RRBotSystemPositionOnlyHardware::export_command_interfaces()
{std::vector<hardware_interface::CommandInterface> command_interfaces;for (uint i = 0; i < info_.joints.size(); i++){command_interfaces.emplace_back(hardware_interface::CommandInterface(info_.joints[i].name, hardware_interface::HW_IF_POSITION, &hw_commands_[i]));}return command_interfaces;
}hardware_interface::CallbackReturn RRBotSystemPositionOnlyHardware::on_activate(const rclcpp_lifecycle::State & /*previous_state*/)
{// BEGIN: 这一段是出测试使用考虑,请勿拷贝至实际生产环境RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Activating ...please wait...");for (int i = 0; i < hw_start_sec_; i++){rclcpp::sleep_for(std::chrono::seconds(1));RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "%.1f seconds left...",hw_start_sec_ - i);}// END: 这一段是出测试使用考虑,请勿拷贝至实际生产环境// command和state开始时应该是相同的for (uint i = 0; i < hw_states_.size(); i++){hw_commands_[i] = hw_states_[i];}RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Successfully activated!");return hardware_interface::CallbackReturn::SUCCESS;
}hardware_interface::CallbackReturn RRBotSystemPositionOnlyHardware::on_deactivate(const rclcpp_lifecycle::State & /*previous_state*/)
{// BEGIN: 这一段是出测试使用考虑,请勿拷贝至实际生产环境RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Deactivating ...please wait...");for (int i = 0; i < hw_stop_sec_; i++){rclcpp::sleep_for(std::chrono::seconds(1));RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "%.1f seconds left...",hw_stop_sec_ - i);}RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Successfully deactivated!");// END: 这一段是出测试使用考虑,请勿拷贝至实际生产环境return hardware_interface::CallbackReturn::SUCCESS;
}hardware_interface::return_type RRBotSystemPositionOnlyHardware::read(const rclcpp::Time & /*time*/, const rclcpp::Duration & /*period*/)
{// BEGIN: 这一段是出测试使用考虑,请勿拷贝至实际生产环境RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Reading...");for (uint i = 0; i < hw_states_.size(); i++){// 模拟RRBot的运动hw_states_[i] = hw_states_[i] + (hw_commands_[i] - hw_states_[i]) / hw_slowdown_;RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Got state %.5f for joint %d!",hw_states_[i], i);}RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Joints successfully read!");// END: 这一段是出测试使用考虑,请勿拷贝至实际生产环境return hardware_interface::return_type::OK;
}hardware_interface::return_type RRBotSystemPositionOnlyHardware::write(const rclcpp::Time & /*time*/, const rclcpp::Duration & /*period*/)
{// BEGIN: 这一段是出测试使用考虑,请勿拷贝至实际生产环境RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Writing...");for (uint i = 0; i < hw_commands_.size(); i++){// 仿真发送命令到hardwareRCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Got command %.5f for joint %d!",hw_commands_[i], i);}RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Joints successfully written!");// END: 这一段是出测试使用考虑,请勿拷贝至实际生产环境return hardware_interface::return_type::OK;
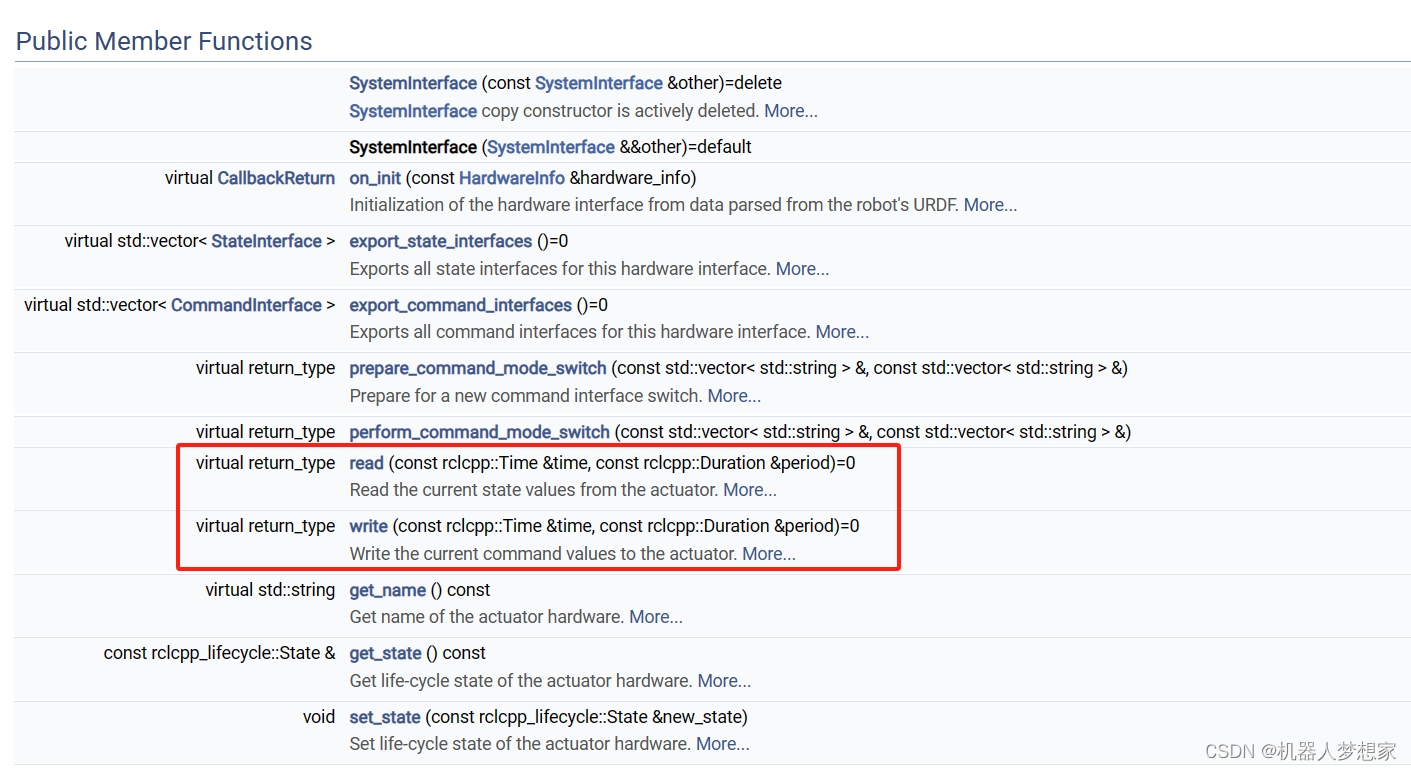
}} // namespace ros2_control_demo_example_1#include "pluginlib/class_list_macros.hpp"PLUGINLIB_EXPORT_CLASS(ros2_control_demo_example_1::RRBotSystemPositionOnlyHardware, hardware_interface::SystemInterface)hardware_interface::SystemInterface类的说明:1
rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface类的说明:2
也可通过上一篇博客《 ROS2 LifecycleNode讲解及实例》中的介绍学习。
三、测试运行

总结
先把当前完成部分更新到博客,运行结果截图如上所示,这两天继续完善。
ROS2 Control: hardware_interface::SystemInterface Class Reference ↩︎
Class LifecycleNodeInterface ↩︎
这篇关于【ros2 control 机器人驱动开发】简单双关节机器人学习-example 1的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







