本文主要是介绍编译安装高翔的ORBSLAM2_with_pointcloud_map,获取点云地图,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言:众所周知,开源版本的orbslam2没有地图的生成和保存模块。
这里高翔博士提供了一个自己加的一个点云模块在上面,供大家学习。
一、下载高翔的修改后的代码
git clone https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map.git
数据集下载位置
https://vision.in.tum.de/data/datasets/rgbd-dataset/download#freiburg1_desk
补充:
orbslam2泡泡注释版:http://git.oschina.net/paopaoslam/ORB-SLAM2
有价值的参考资料:https://www.cnblogs.com/polobymulberry/p/6257616.html
http://www.liuxiao.org/2016/07/ubuntu-orb-slam2-%E5%9C%A8-ros-%E4%B8%8A%E7%BC%96%E8%AF%91%E8%B0%83%E8%AF%95/
二、分别编译安装
将其中的压缩包解压,用压缩包中的ORBSLAM2_with_pointcloud_map代替原来的根目录下的ORBSLAM2_with_pointcloud_map。
2.1 编译g2o_with_orbslam2
cd g2o_with_orbslam2
mkdir build
cd build
cmake ..
make
sudo make install
2.2 编译ORB_SLAM2_modified
cd ORB_SLAM2_modified
mkdir build
cd build
make
这里我出错了,没有用到刚编译的Thirdparty中的g2o,反而用的是ROS下的g2o,先卸载掉ROS下的g2o,在需要的时候装回去。
卸载ROS下的g2o:
sudo apt-get remove ros-indigo-libg2o
注意:这里先卸载掉,然后再在lsd_slam报错的时候再装上,命令为: sudo apt-get install ros-indigo-libg2o
[ros下的g2o是libg2o:http://wiki.ros.org/libg2o]
然后继续编译没有出现该问题
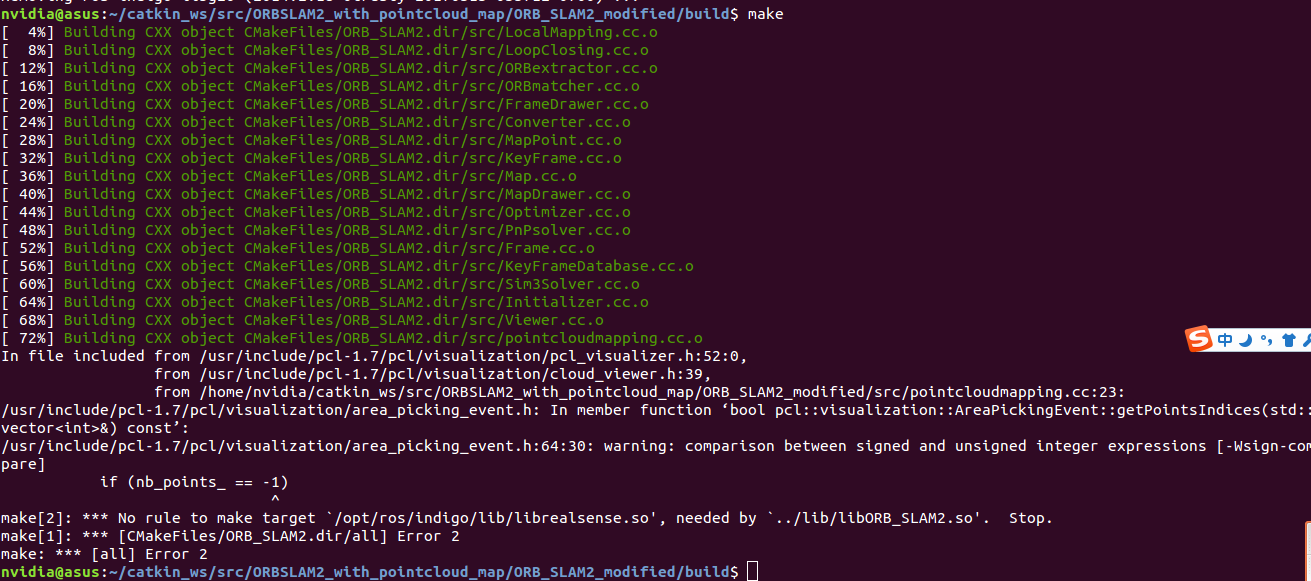
但是又出现问题了:
No rule to make target `/opt/ros/indigo/lib/librealsense.so', needed by `../lib/libORB_SLAM2.so'. Stop.
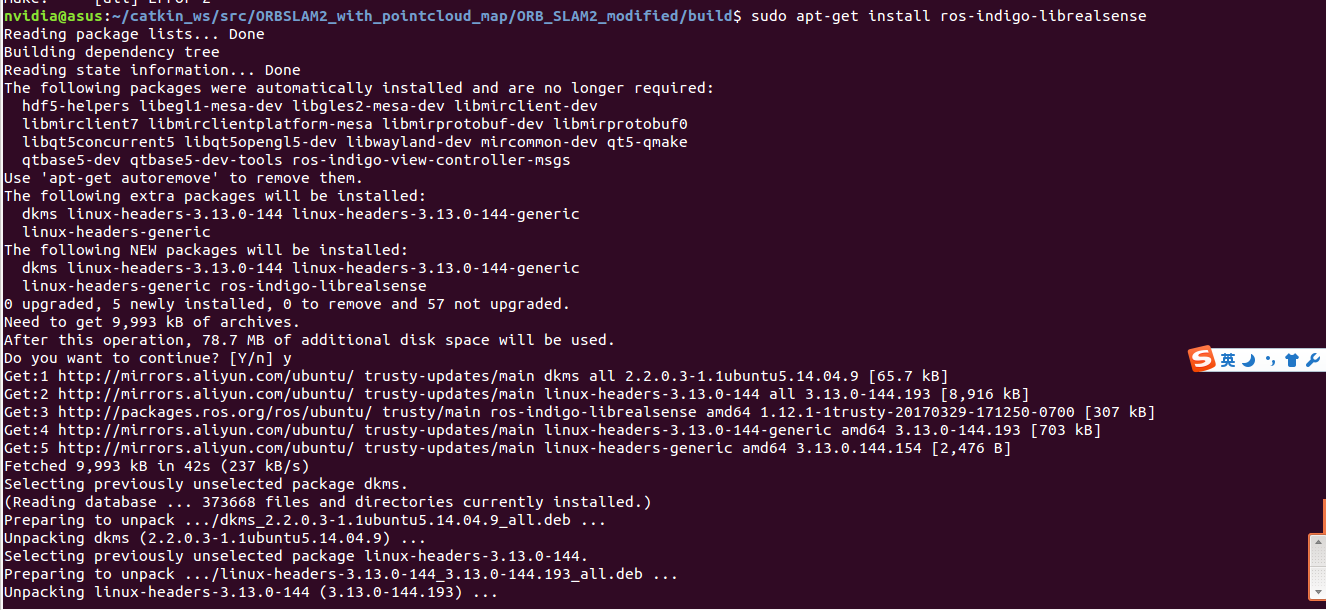
表明需要librealsense下载安装这个包。查阅发现ROS下有这个包http://wiki.ros.org/librealsense,安装之:
sudo apt-get install ros-indigo-librealsense
安装完成后,重新make
make[2]: *** No rule to make target `/usr/lib/libOpenNI2.so', needed by `../lib/libORB_SLAM2.so'. Stop.
安装OpenNI
方法一:
OpenNI2安装一些依赖软件:
$ sudo apt-get install git g++ make python libusb-1.0-0-dev libudev-dev pkg-config
Clone OpenNI2:
下载openni:
https://github.com/occipital/OpenNI2/tree/2.2-beta2
或用git:
$ git clone https://github.com/occipital/OpenNI2
$ git checkout -b 2.2-beta2
$ cd OpenNI2
//未完待续
//参考博客https://blog.csdn.net/billbliss/article/details/56489674
方法二、
openni2_camera
http://wiki.ros.org/openni2_camera
sudo apt-get inatsll ros-indigo-openni2-*
【一条ROS指令能解决的事情,为什么要那么复杂,哈哈】
再次make(不需要先make clean)
搞定
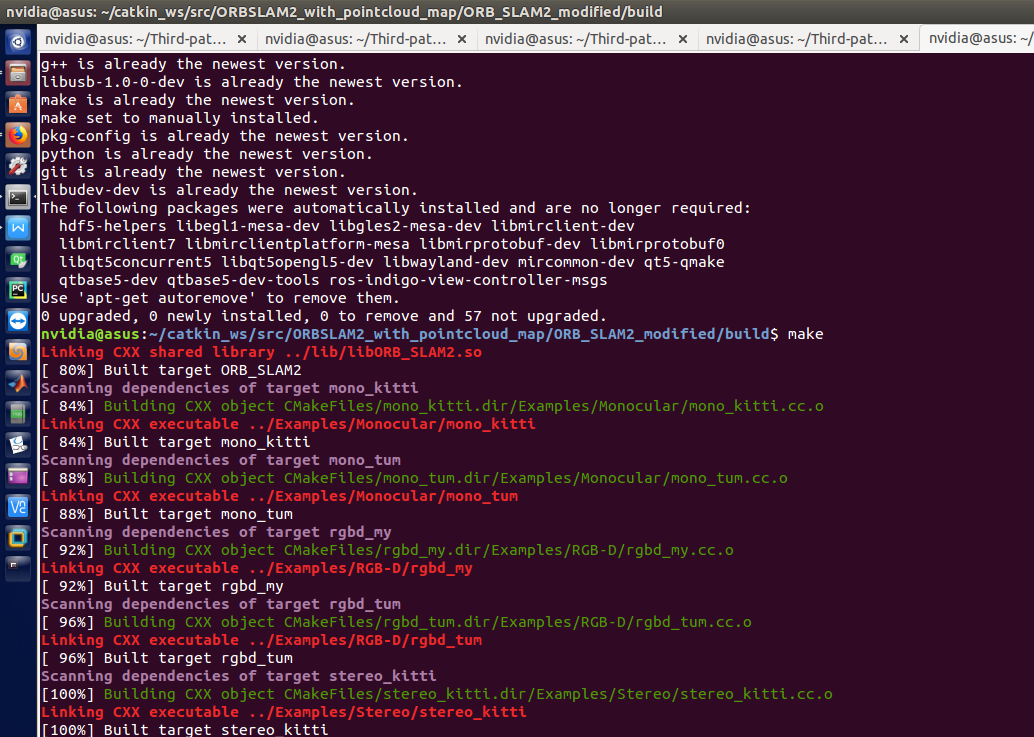
至此,高翔修改过的orbslam2-带点云地图版本就配置完成了。
******************************我是萌萌哒的分割线*********************
//TODO
//用单目或者双目或者rgbd来做做实验,看下效果怎么样,生成的点云地图再转换成为八叉树地图
//运行方法
./Example/RGB-D/rgbd_tumVocabulary/ORBvoc.bin path_to_settings path_to_sequence path_to_association
such as
./Example/RGB-D/rgbd_tum ../../Vocabulary/ORBvoc.txt TUM2.yaml ../../rgbd-data/ ../../rgbd-data/associations.txt
我的运行指令如下:
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.bin Examples/RGB-D/TUM1.yaml ~/all_SLAM_ws/data/rgbd_dataset_freiburg1_xyz Examples/RGB-D/associations/fr1_xyz.txt
运行RGB-D实例时需要RGBD(depth)图像和RGB图像,所以需要把每一张RGB图像与之对应的RGBD图像建立关联(在Examples/RGB-D/associations/目录下有一部分关联文件,可以直接使用),关联python文件associate.py(根据timestamp进行关联)。
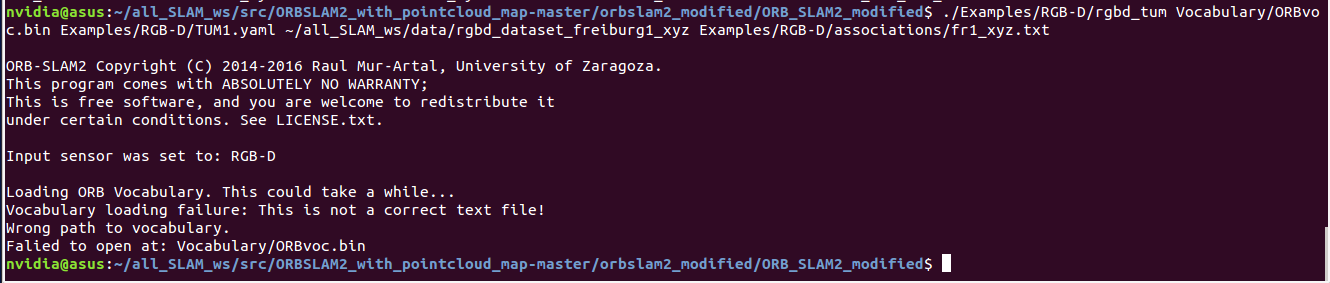
但是报了一个错,如上面所示。无法打开ORBvoc.bin文件【这个ORBvoc.bin文件是我从原始的ORB_SLAM2中下载得到的】
是要我生成自己的ORBvoc.bin吗?不应该呀,应该都是一样的。
发现,这里其实加载的不是bin文件,而是txt文件。
我去。。。说好的加入对ORBvoc.bin文件的支持呢?
那么命令改为:
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml ~/all_SLAM_ws/data/rgbd_dataset_freiburg1_xyz Examples/RGB-D/associations/fr1_xyz.txt
这里我们可以根据实际相机的标定结果,修改参数
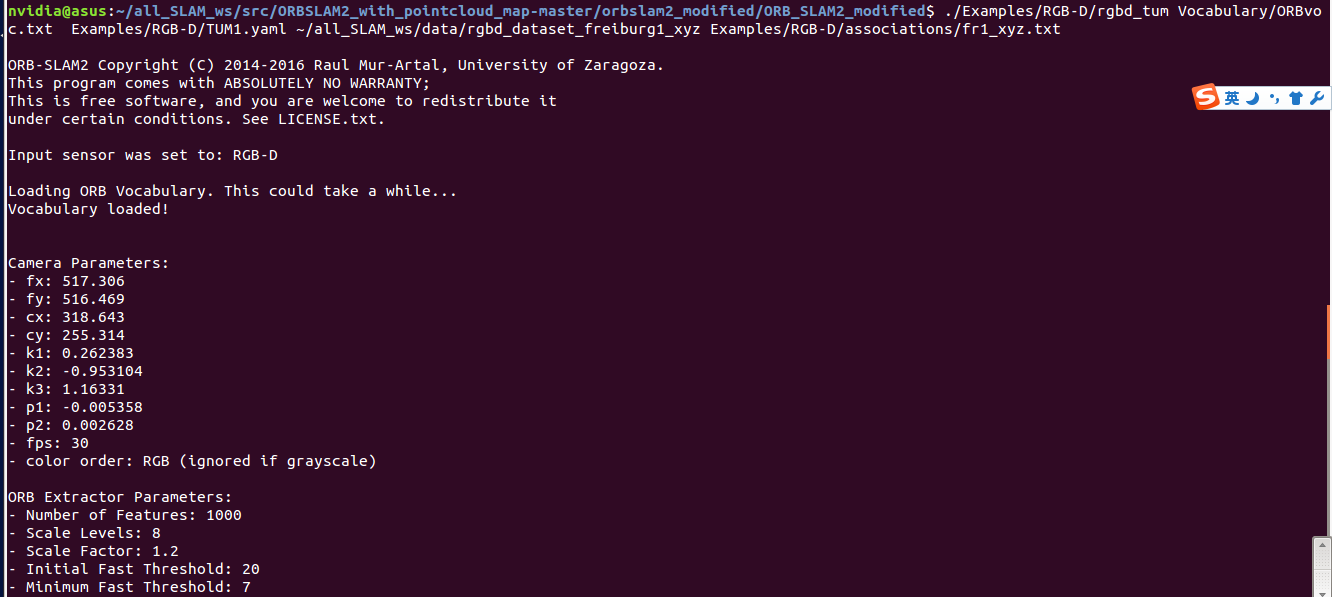
正在加载词袋和相机参数哦!等会我们就看到结果了
注意:EXAMPLE下的RGB目录中有将RGB图像与深度depth关联的associate.py文件
这里的修改版https://www.cnblogs.com/polobymulberry/p/6257616.html中的泡泡注释是https://gitee.com/paopaoslam/ORB-SLAM2/blob/master是加载ORBvoc.bin文件
bug:运行一会卡机??变成灰色了WTF。。。
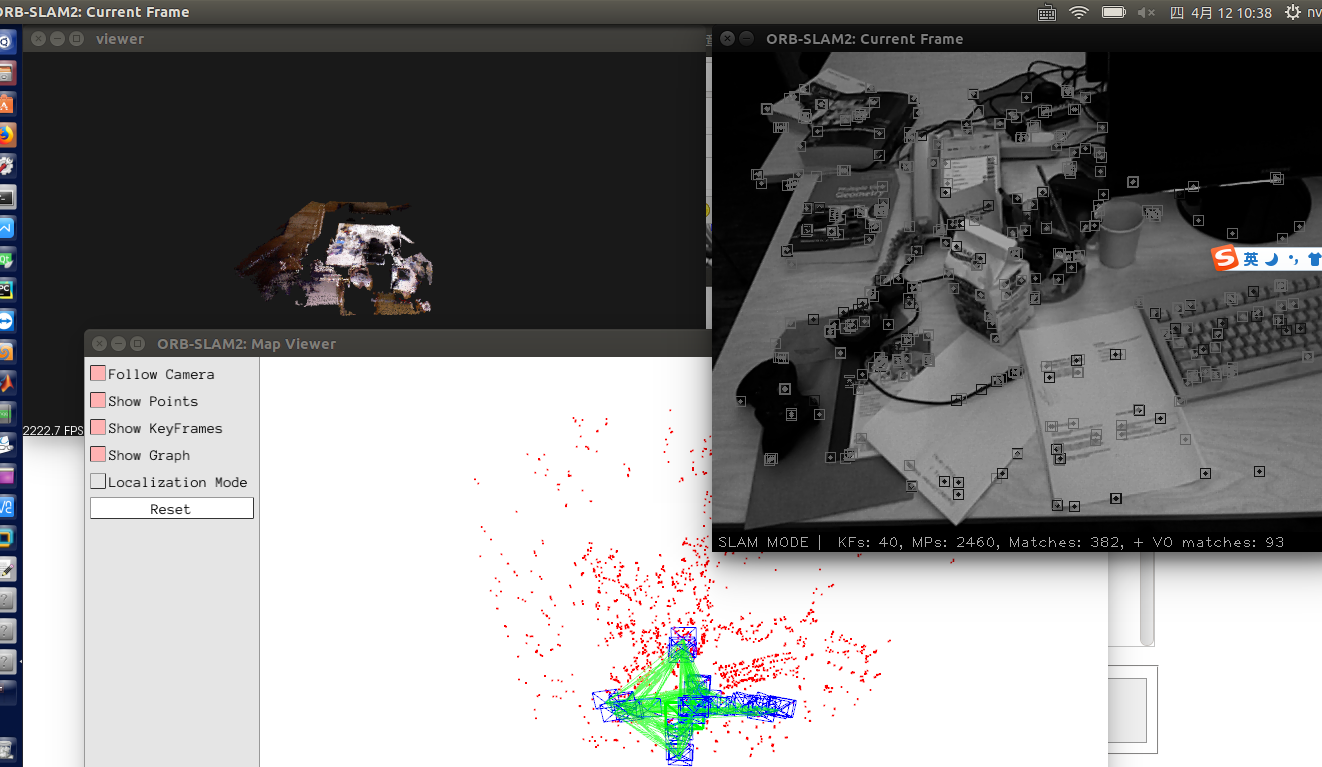
卡住了就ctrl+c吧。。。多运行几次发现也还ok,在回放数据包的时候注意不要操作电脑看就好了,想想有道理。。毕竟我电脑配置渣渣。。
三、PCL地图保存
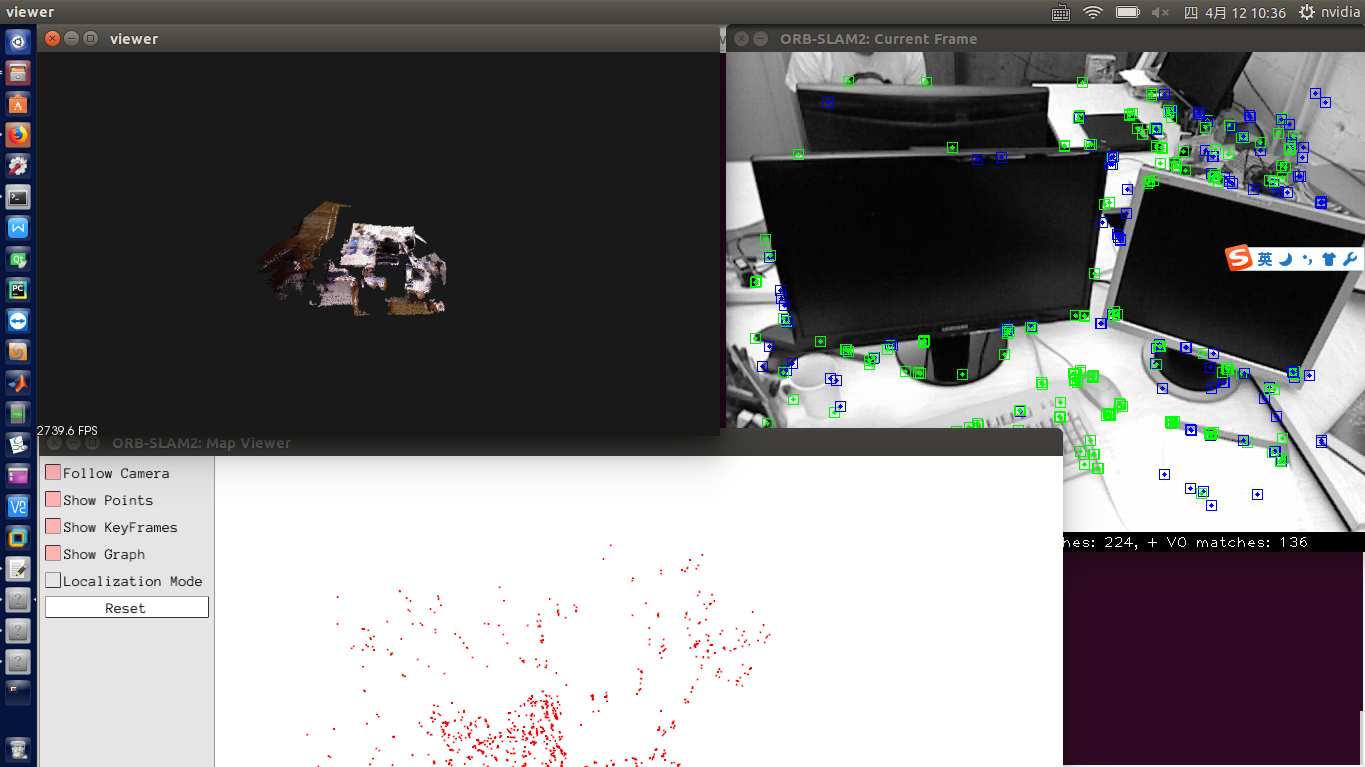
高博士通过加了一个pcl_viewer和点云拼接的线程,来实现实时显示拼接的点云图像。
那我们的点云地图保存在哪里了呢?后面我还要用点云地图来生成octomap三维栅格地图呢!!
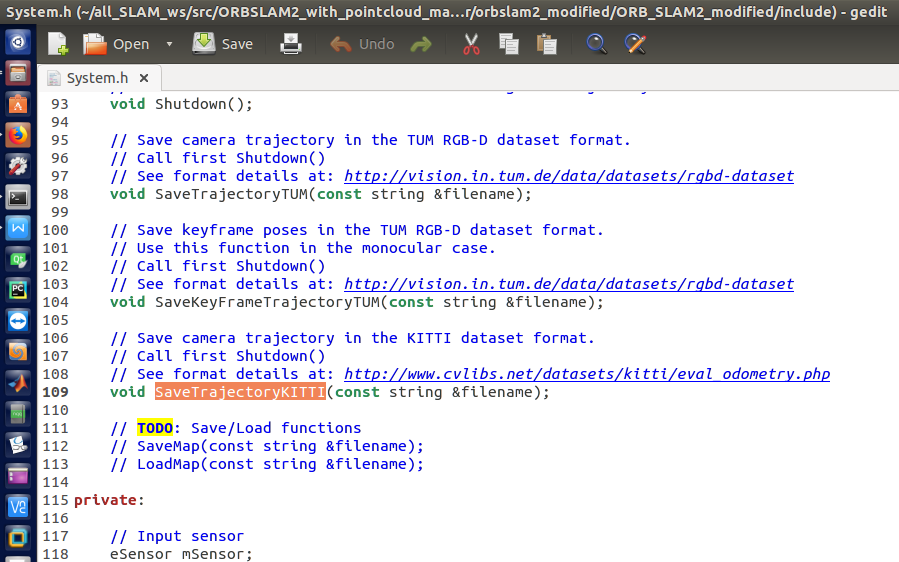
//看看源代码中保存路径。
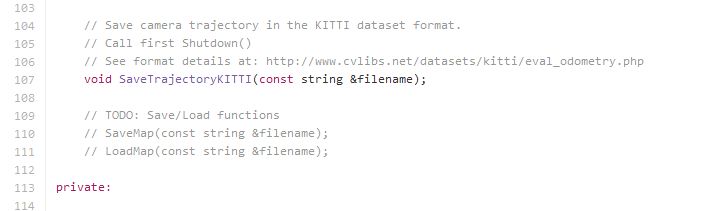
在include文件夹中的system.h里,我们来一睹真容。。。。
//具体代码怎么改呢?
//orbslam2生成的地图又是什么样子的呢?
看了下吴博注释版本,也没写啊,这是要我自己写的节奏?
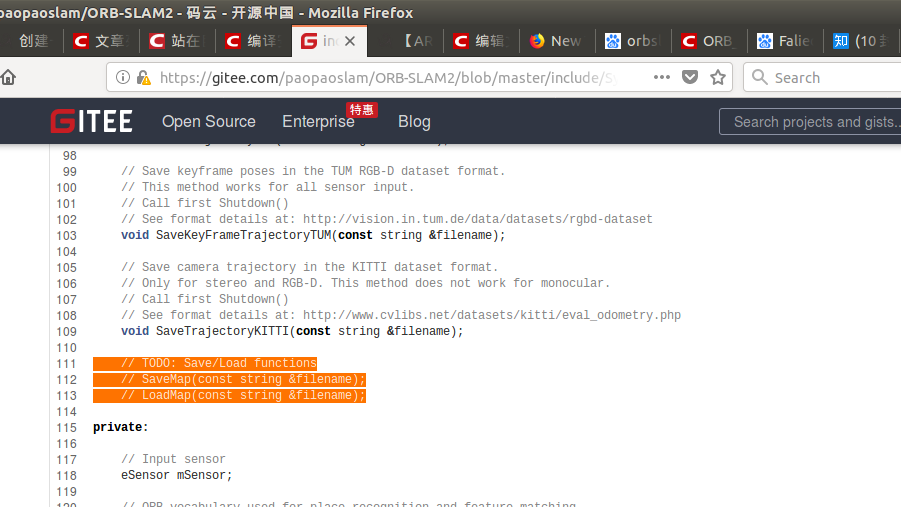
//TODO
//编写SaveMap和LoadMap代码(有哪位大佬写好的吗 )
)
//那就只能把octomap生成这部分代码写一个线程加进来吗?这个好难
//还是先做做离线的点云地图转换成为octomap三维地图吧,心好累。
******我是萌萌哒的分割线***********2018.4.12***********
四、编译ROS下的接口
有问题,不要往下做!!!
找不到pcl相关头文件,搜索发现我是安装了PCL的,其实与ORB代码中的引用路径有关系,查看
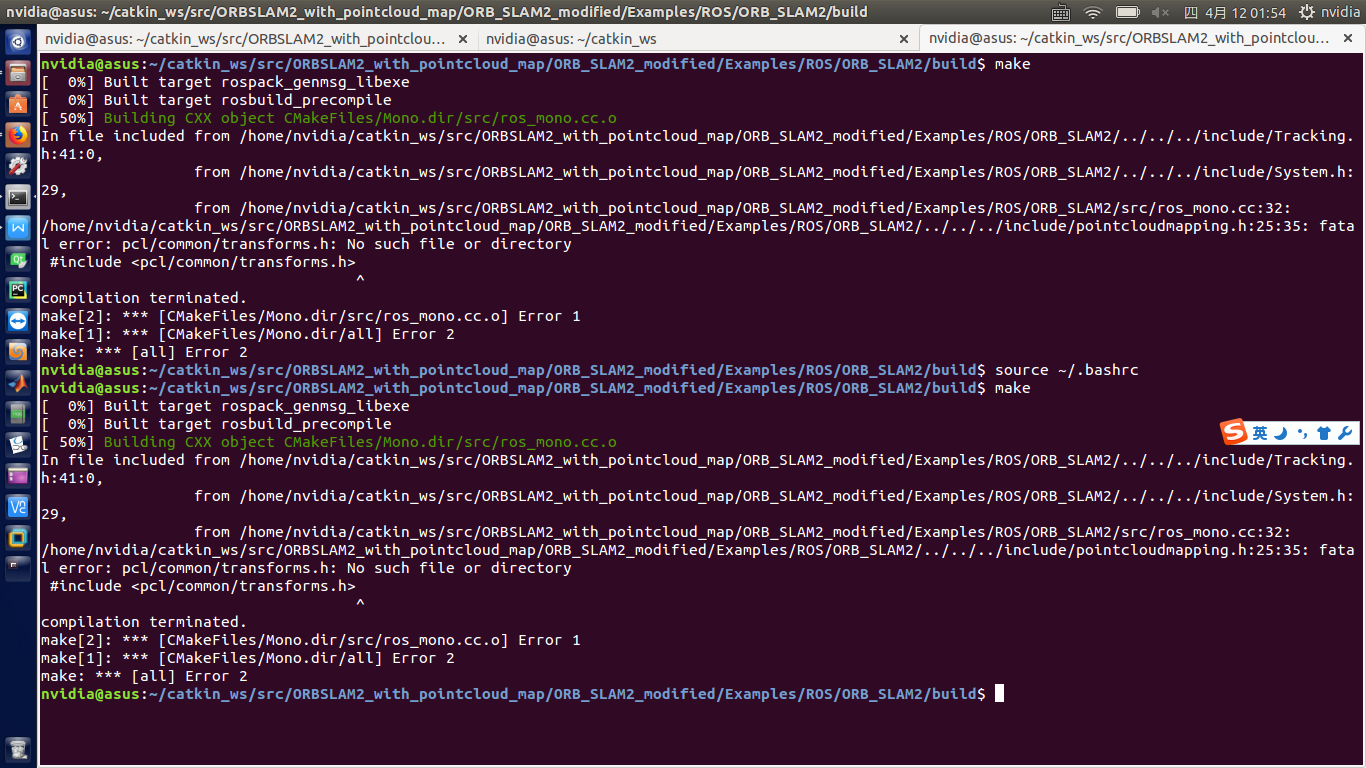
/home/nvidia/catkin_ws/src/ORBSLAM2_with_pointcloud_map/ORB_SLAM2_modified/Examples/ROS/ORB_SLAM2/../../../include/pointcloudmapping.h:25:35: fatal error: pcl/common/transforms.h: No such file or directory
#include <pcl/common/transforms.h>
说在pointcloudmapping.h中引用的PCL相关头文件找不到,他这个是在当前目录下找相应头文件,可以把整个PCL相关头文件复制过来
sudo cp -r /usr/include/pcl-1.7/pcl/* /home/nvidia/catkin_ws/src/ORBSLAM2_with_pointcloud_map/ORB_SLAM2_modified/include/pcl
然后make
这个问题解决,但又遇到一个问题

No rule to make target `../../../../Thirdparty/g2o/lib/libg2o.so'
缺少libg2o.so库文件,说明g2o未正确编译安装
发现Thiedparty中确实没有相关g2o文件。从高翔的github上复制过来用
将ORB_SLAM2_modified中的编译好的libg2o.so拷贝出来。

//TOSO
//给我的感觉好像是ROS下的接口本身就没处理好?
//有待解决,还是这个错误
这篇关于编译安装高翔的ORBSLAM2_with_pointcloud_map,获取点云地图的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






