pointcloud专题

pcl::PointCloud各种添加点云方法的速度对比
pcl::PointCloud官方提供了一个添加点云的函数接口push_back(),但是实际中经常看到有人先调用resize()函数,再逐个进行赋值,理由是这样更快。本文对两种方法的速度进行对比。 首先详细介绍一下输入数据和这两种方法: 1. 输入数据 本文中输出数据是随机生成的,这不影响后续的速度测试,先把这些数据存储在一个pcl::PointCloud中。 #include <pcl
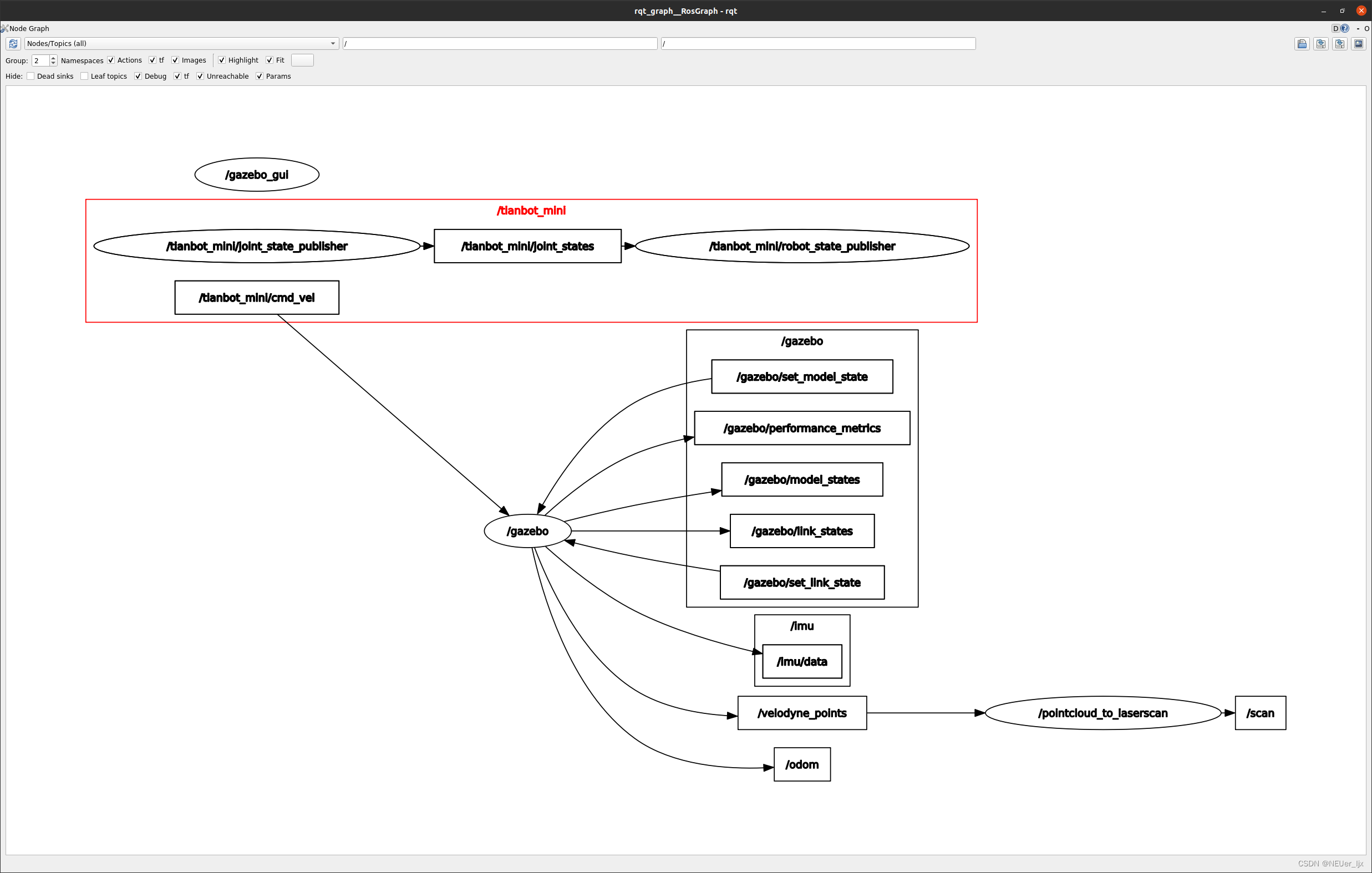
2019-Exploiting Local and Global Structure for PointCloud
Exploiting Local and Global Structure for PointCloud Semantic Segmentation with Contextual Point Representations 期刊:Nips2019 时间:2019 code:https://github.com/fly519/ELGS 目录 Exploiting Local an
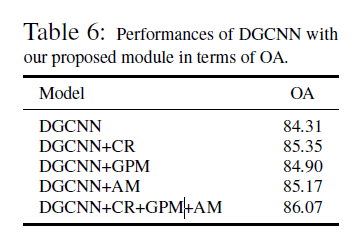
MFC错误E0384没有与参数列表匹配的重载pcl::PointCloud Point Toperator new其中PointT pcl::PointXYZ
原文链接:https://blog.csdn.net/snipertly/article/details/91355298 MFC在最开头加了这样的预编译,导致PCL的new报错。 #ifdef _DEBUG #define new DEBUG_NEW #endif 解决办法:需要将这三行注释掉

module ‘open3d‘ has no attribute ‘PointCloud‘
module ‘open3d‘ has no attribute ‘PointCloud‘ 出现该错误的主要原因是新版本的open3d中api做了修改 open3d.PointCloud() 新api pc = open3d.geometry.PointCloud() Vector3dVector 新api: pc.points = open3d.utility.Vect

编译安装高翔的ORBSLAM2_with_pointcloud_map,获取点云地图
前言:众所周知,开源版本的orbslam2没有地图的生成和保存模块。 这里高翔博士提供了一个自己加的一个点云模块在上面,供大家学习。 一、下载高翔的修改后的代码 git clone https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map.git 数据集下载位置 https://vision.in.tum.de/data
Matlab 2015a 中 pointCloud类相关知识
pointCloud类是Matlab2015a种新引入的一个类,主要用于3D点云数据的存储与操作,其具有如下属性: Location——3D点坐标,数据格式为M*3矩阵或者M*N*3矩阵Color——3D点的RGB颜色 信息,数据格式同上Normal——3D点的法向量信息,数据格式同上Count——3D点的数量Xlimits——X坐标大小范围Ylimits——Y坐标大小范围Zlimits—
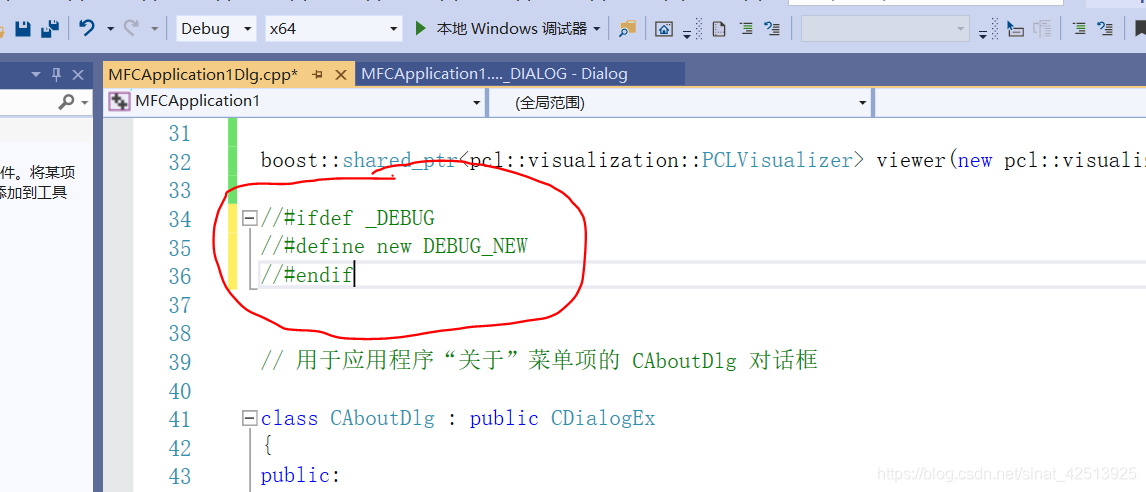
VLP16:使用pointcloud_to_laserscan将三维点云转化为二维LaserScan
一、安装pointcloud_to_laserscan包 GitHub地址:GitHub - ros-perception/pointcloud_to_laserscan at lunar-develhttps://github.com/ros-perception/pointcloud_to_laserscan/tree/lunar-devel 注意避坑:不能用git clone来下载,即

估计PointCloud中的曲面法线(Estimating Surface Normals in a PointCloud)
表面法线是几何表面的重要属性,并在许多领域(如计算机图形应用)中大量使用,以应用生成阴影和其他视觉效果的正确光源。 给定一个几何曲面,通常很简单的方法是将曲面上某一点的法线方向作为垂直于该曲面的矢量。但是,由于我们获取的点云数据集代表了一组实际表面上的点样本,因此有两种可能性: 1、从获取的点云数据集中获取底层曲面,使用曲面网格划分技术,然后从网格中计算曲面法线; 2、使用近似值直接从点云数据