本文主要是介绍工业性能CCD图像处理+,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
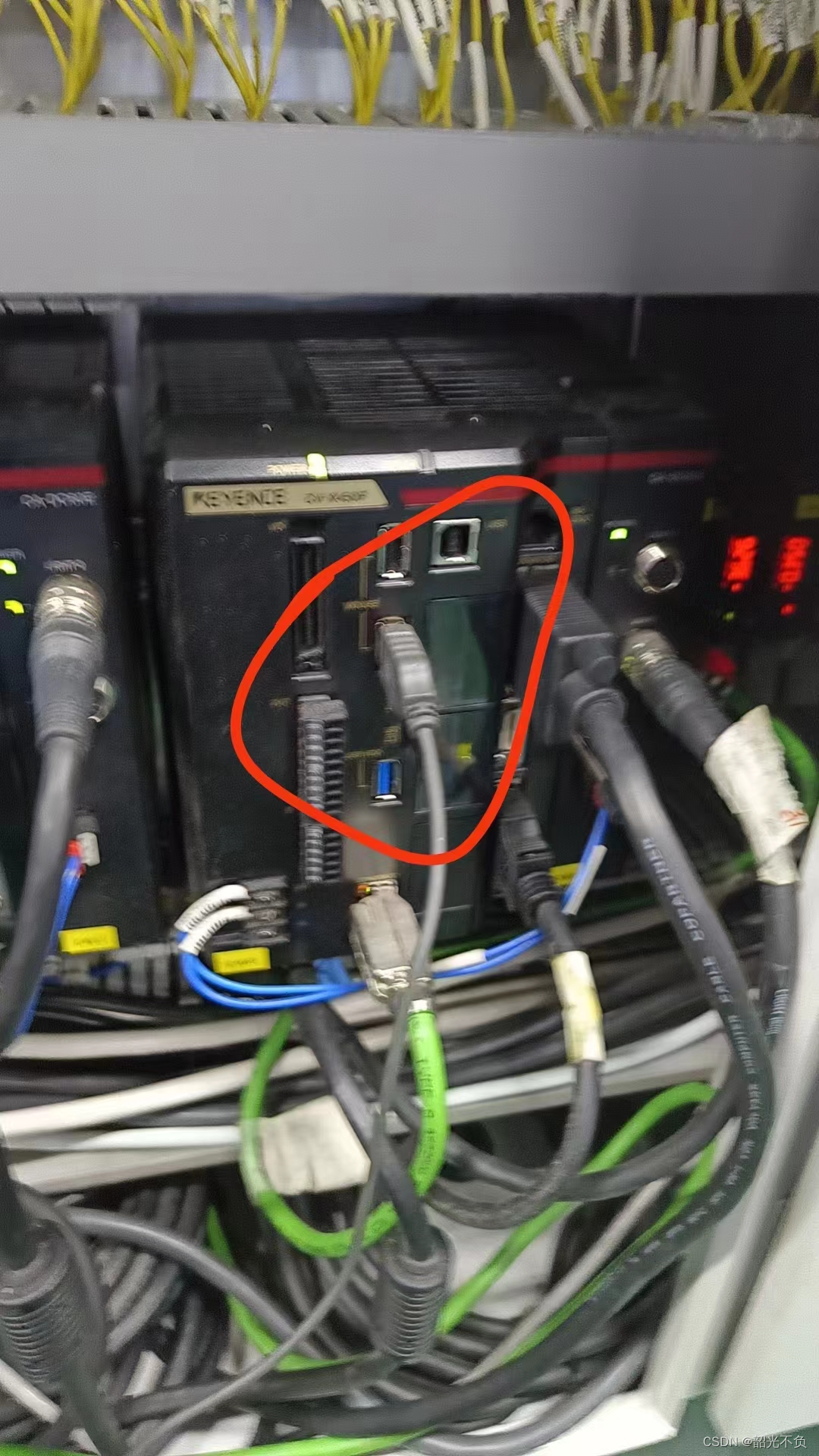
硬件部分
编辑
软件部分
CCD新相机的调试处理(更换相机处理,都要点执行检测来查看图像变化)
问题:新相机拍摄出现黑屏,图像拍摄不清晰,(可以点击图像,向下转动鼠标的滚轮(Mouse Wheel)放大图像)
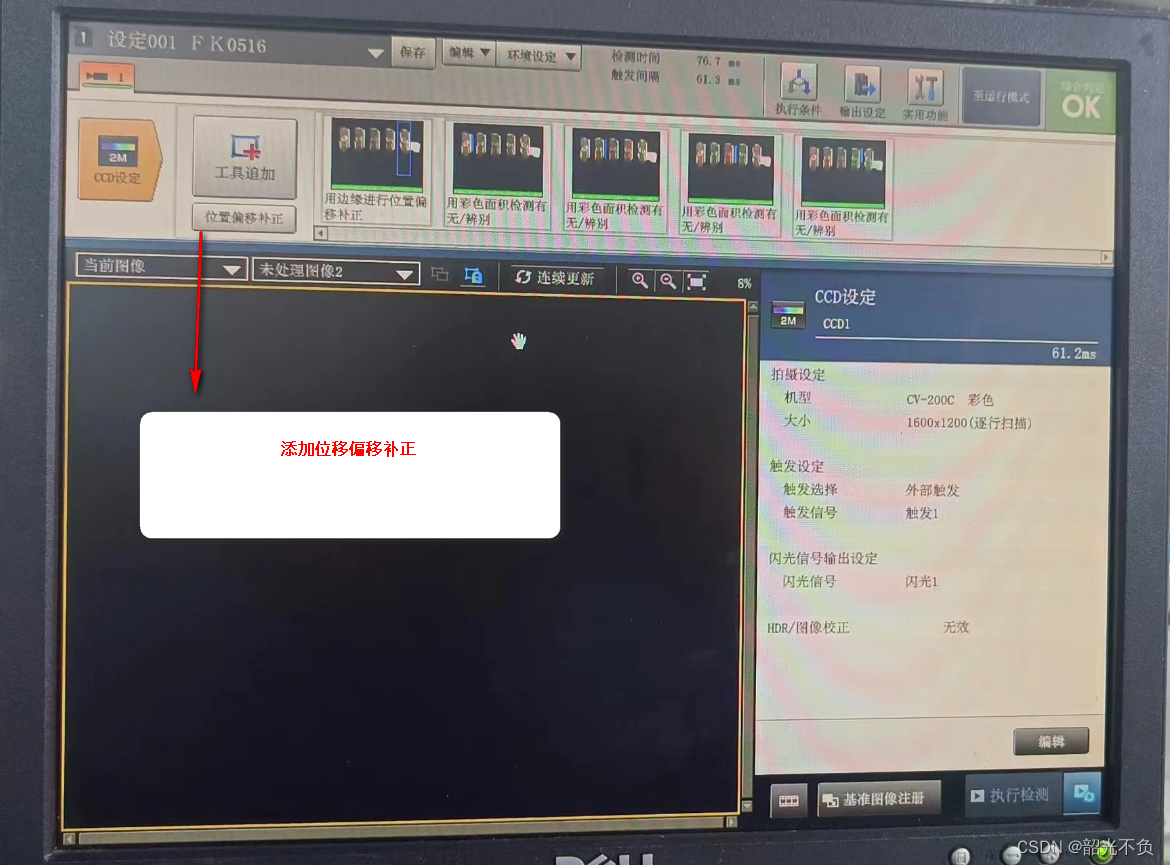
解决办法:进入CCD的设定,选择对应的相机,调试好参数(如下图)
选择好相机型号,选择拍摄图片的大小,拍照速度当太快或者太慢都影响照片的清晰。CCD的敏感度也会对拍摄的照片清晰度有影响。
触发模式的选择(外部触发)
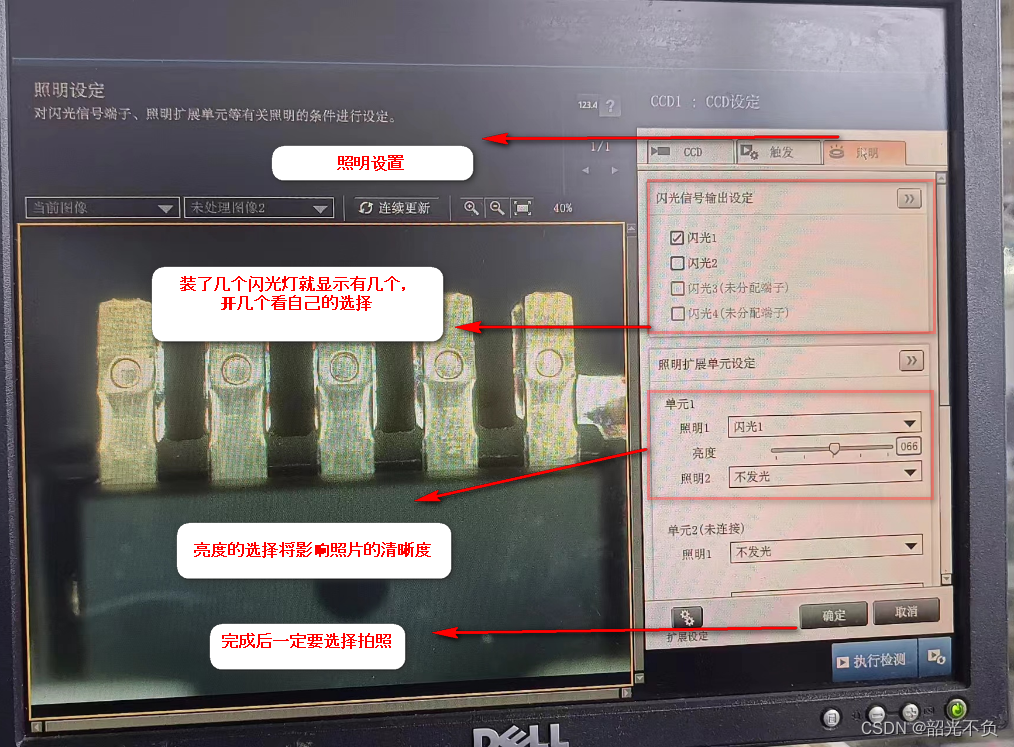
照明设定:选择闪光灯数量,光亮强度
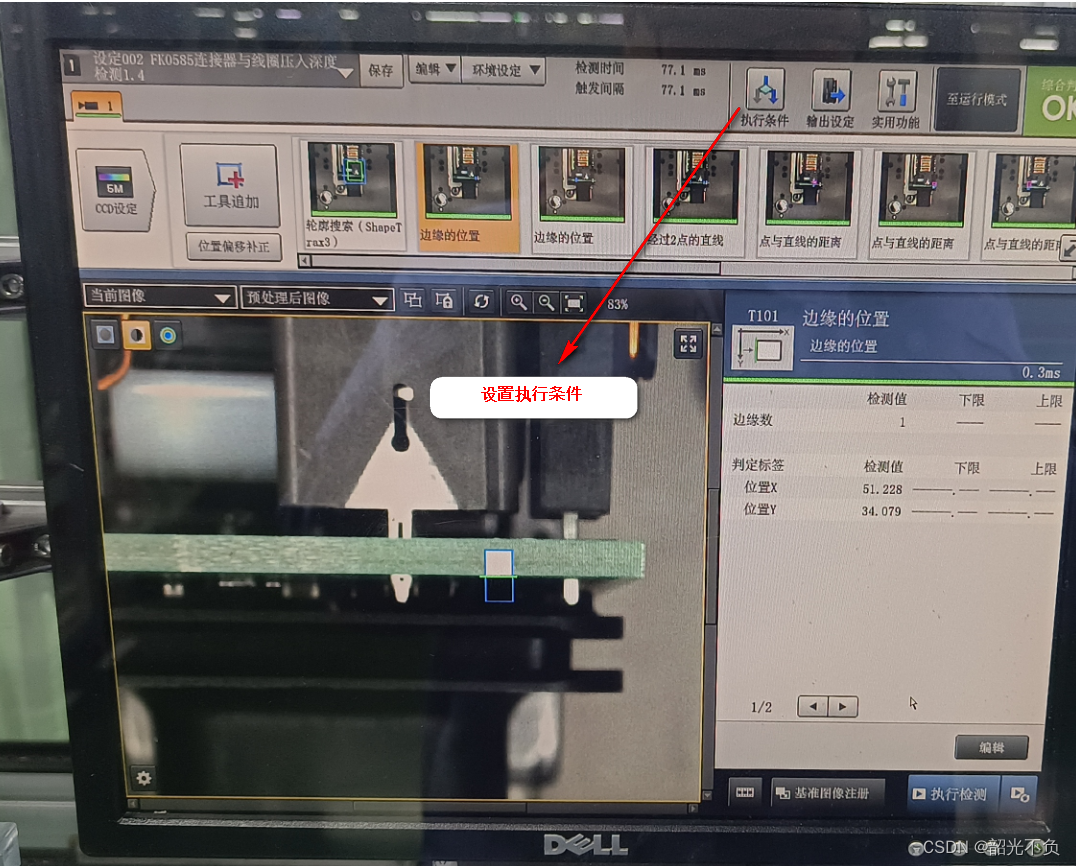
执行条件设定
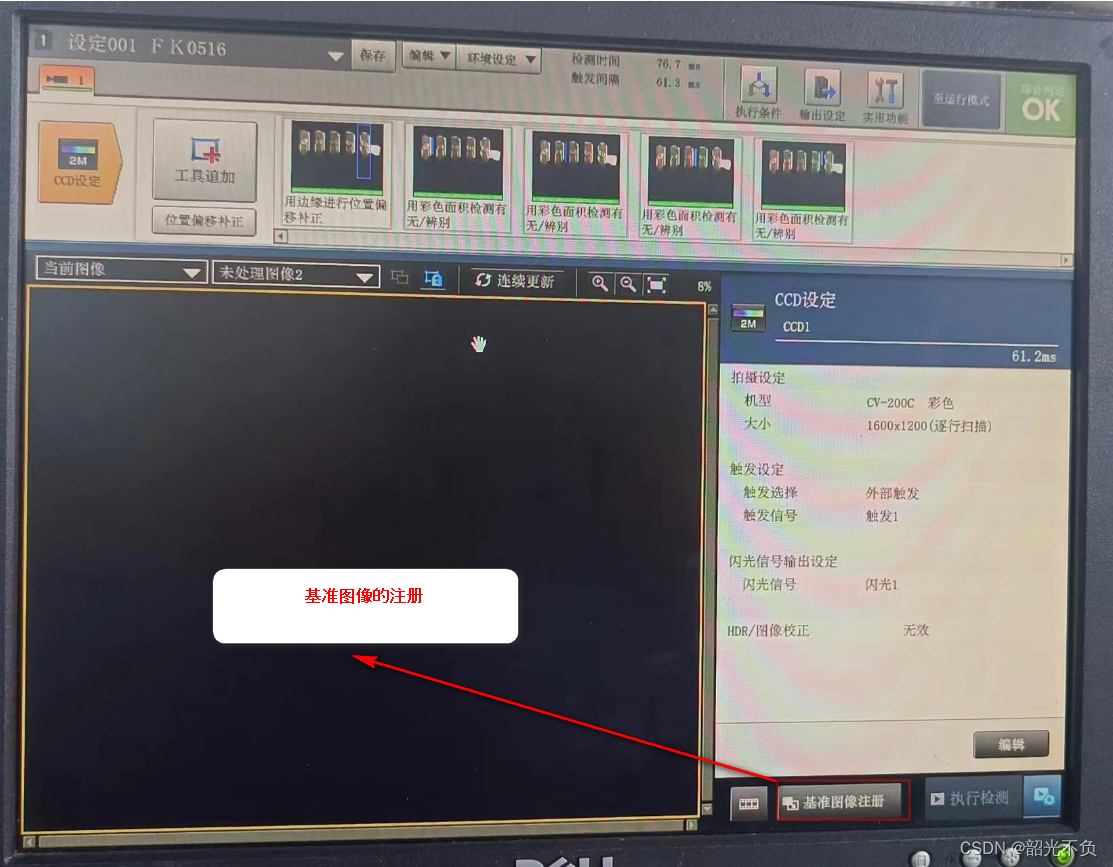
CCD基准图像处理
基准图像处理的选择与拍摄
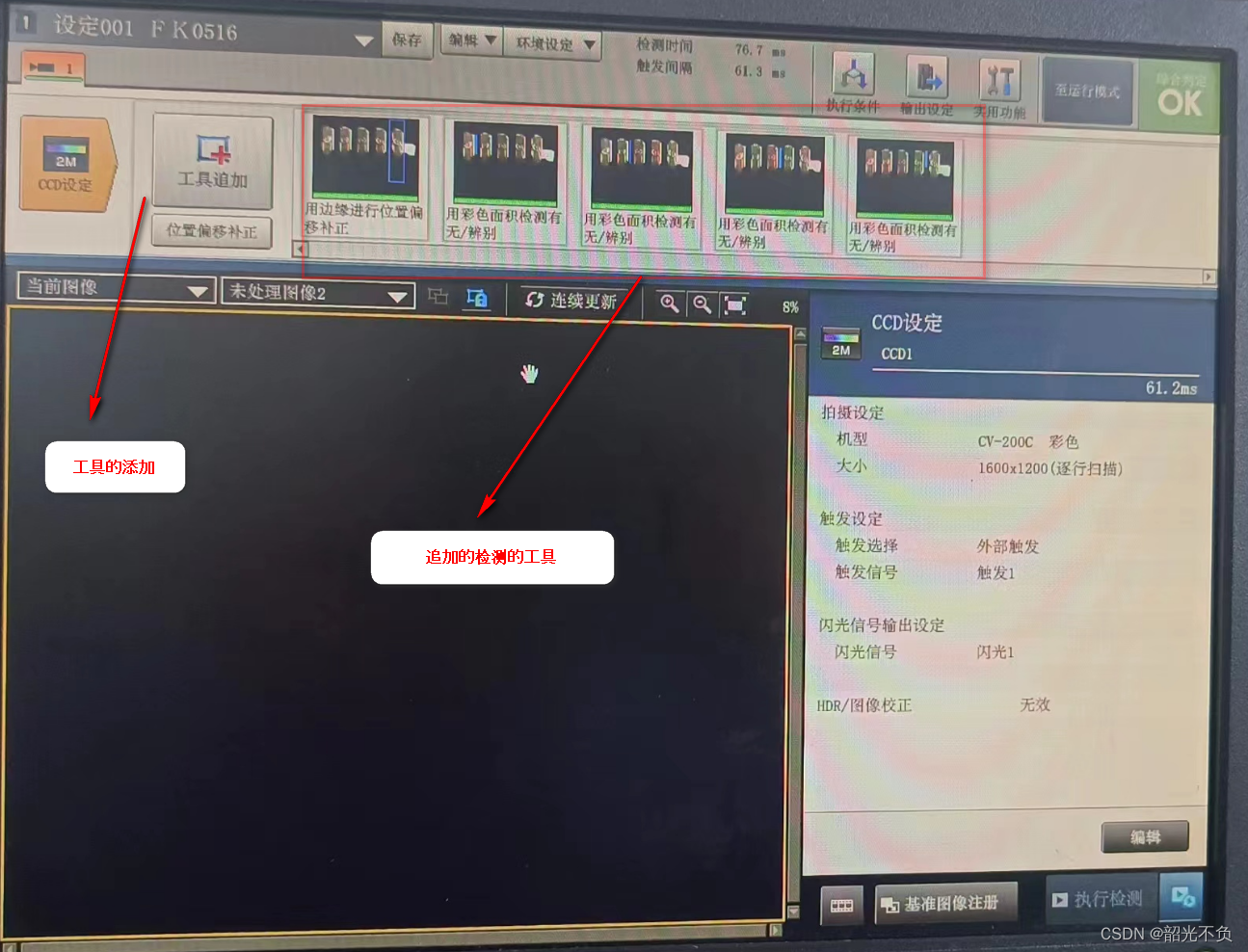
工具的选择与添加(重要!!!)
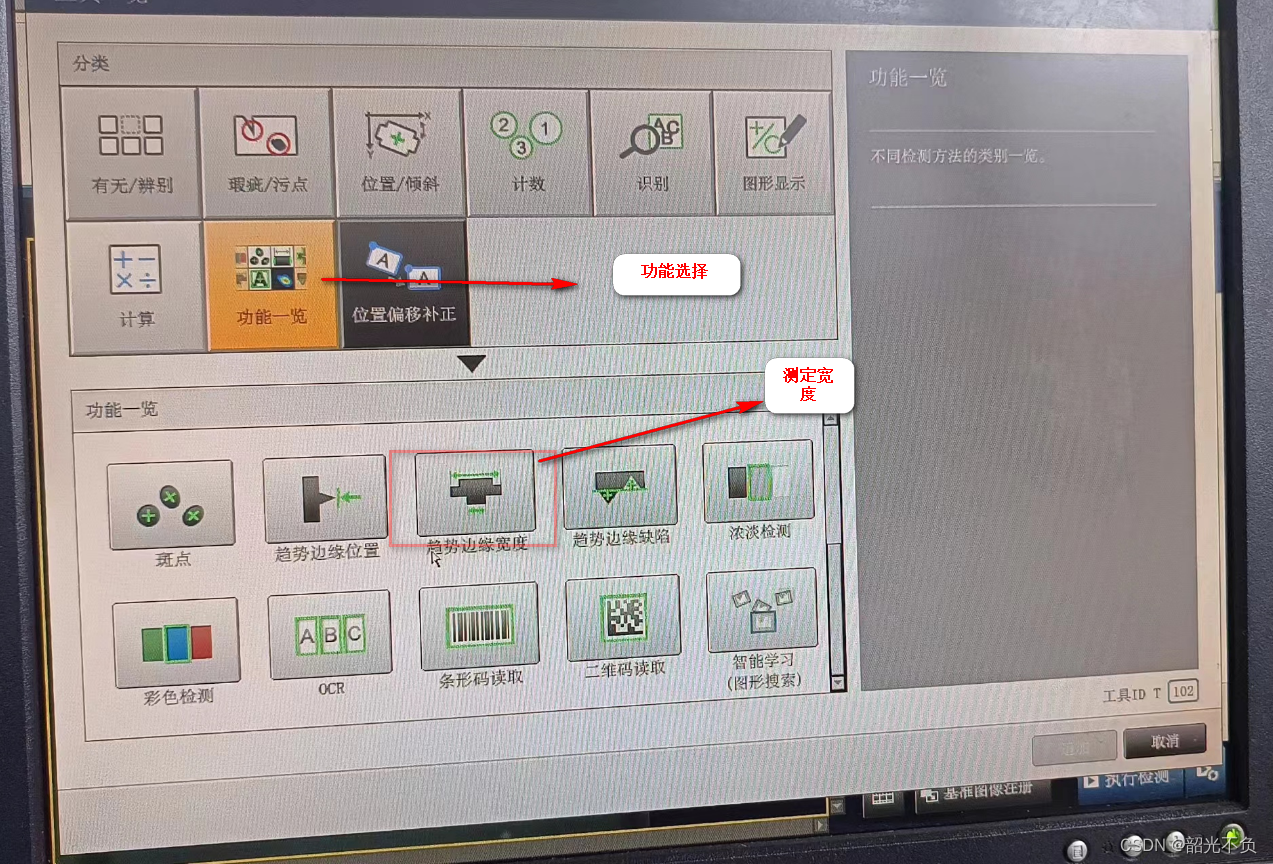
对功能的选择(选择类型,选择功能)
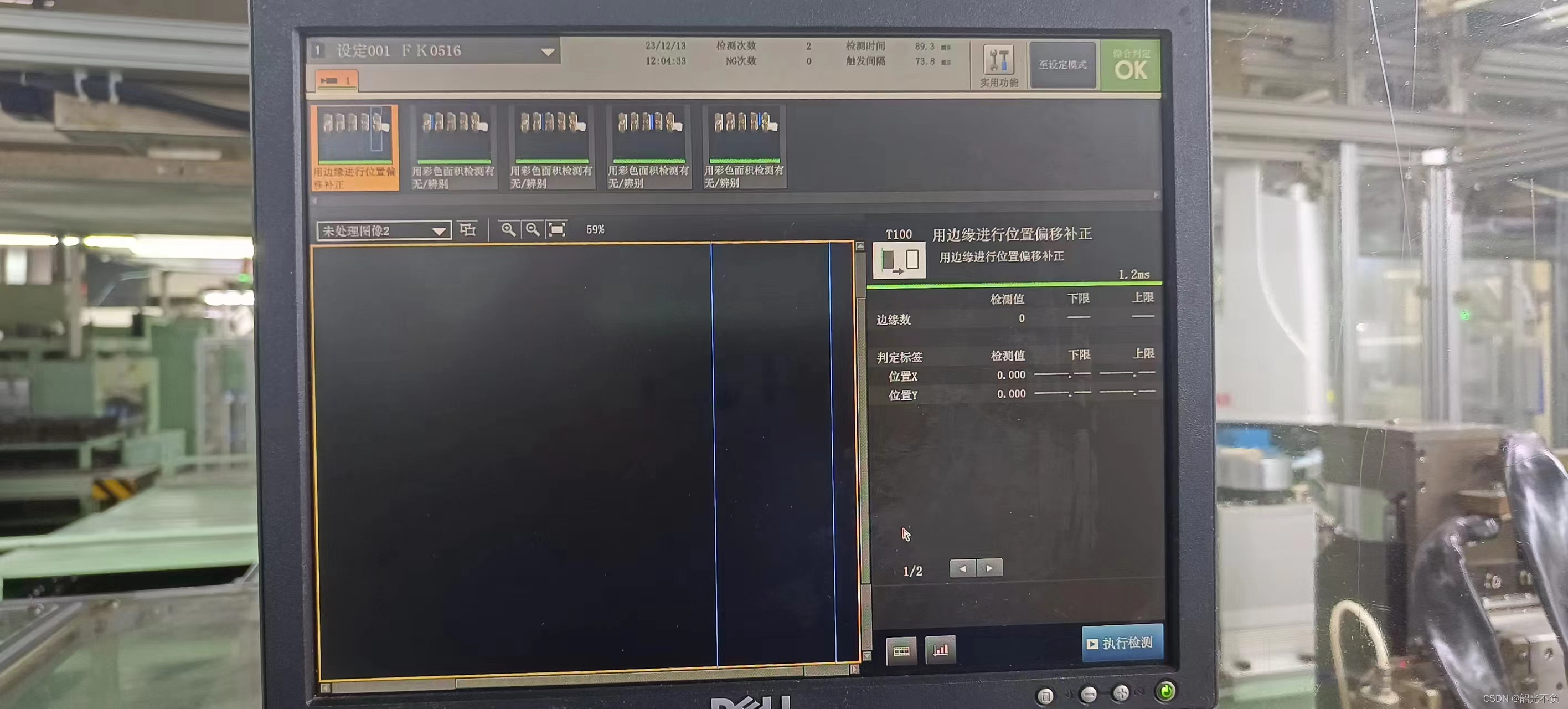
位置偏移补正(重要!!!)
工具功能展示(边缘宽度)
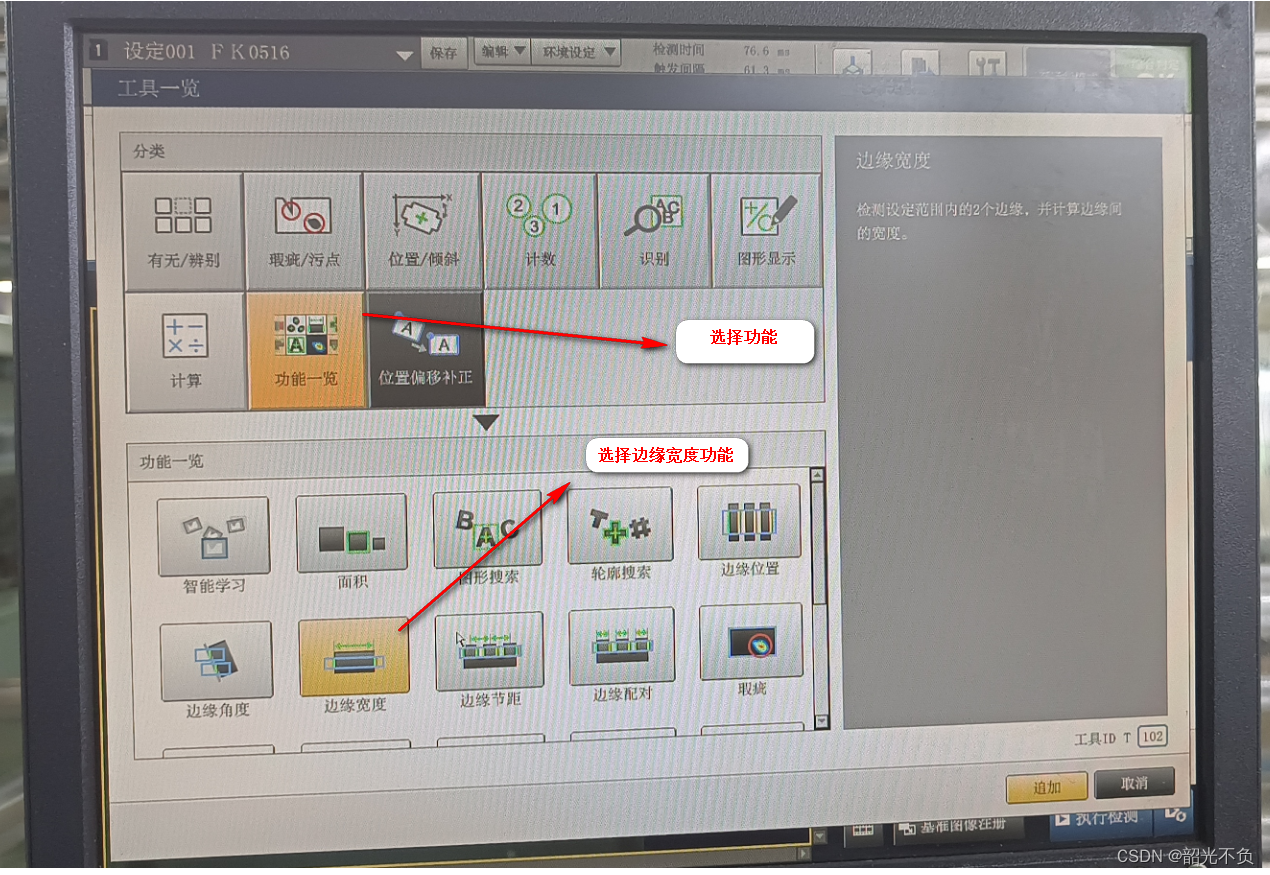
选择工具,选择功能追加边缘宽度功能
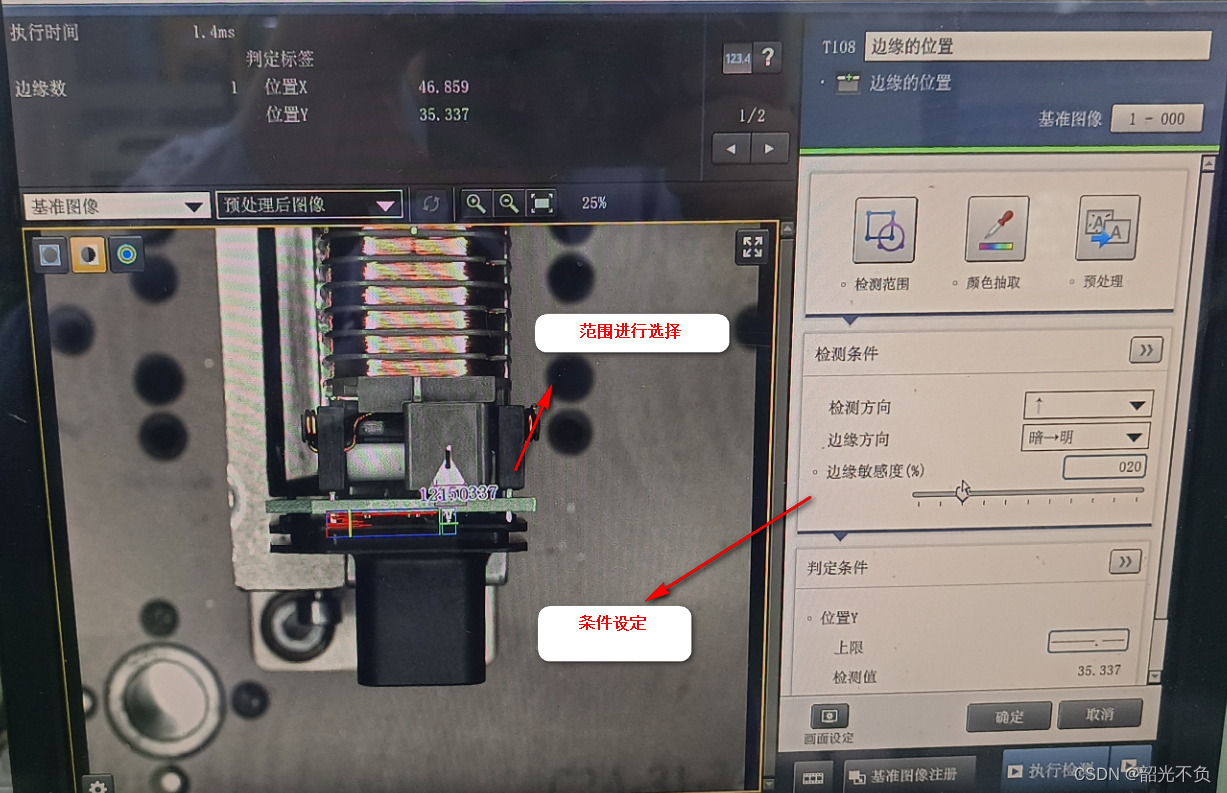
1,选择检测范围
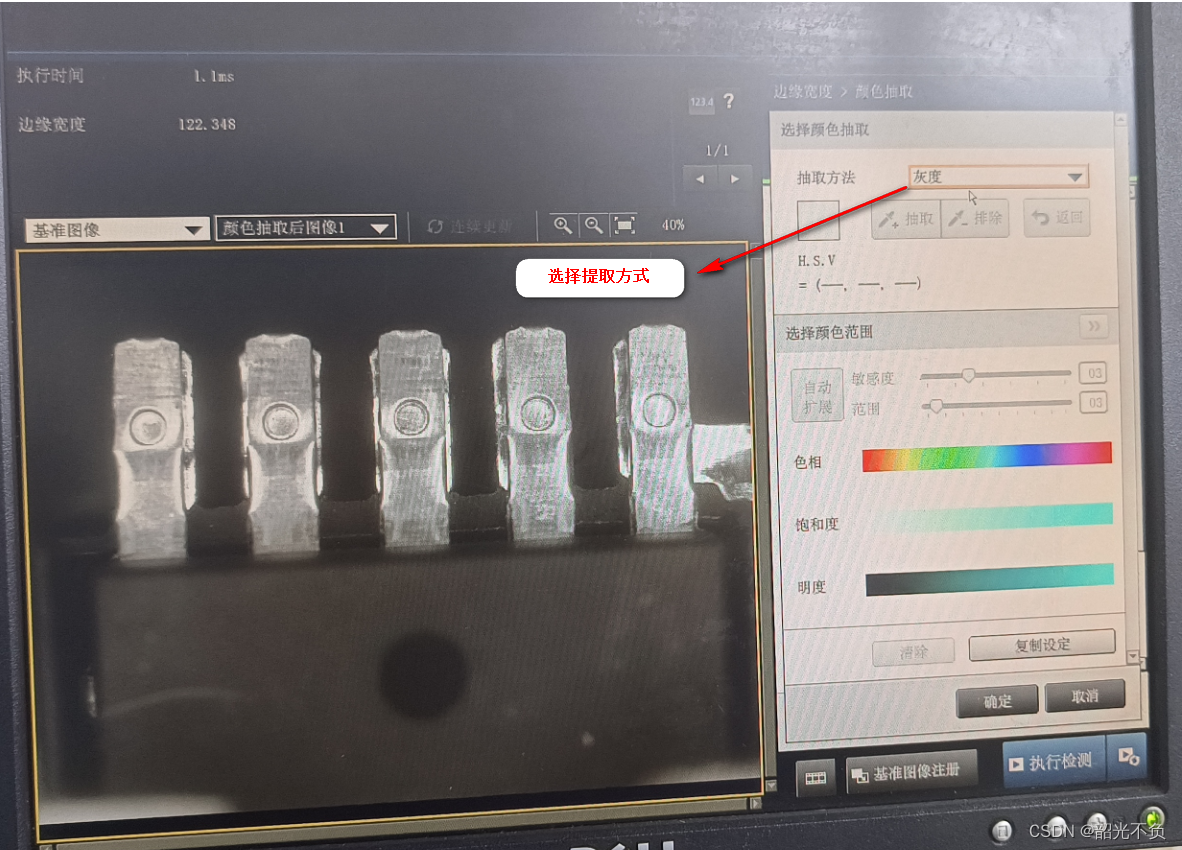
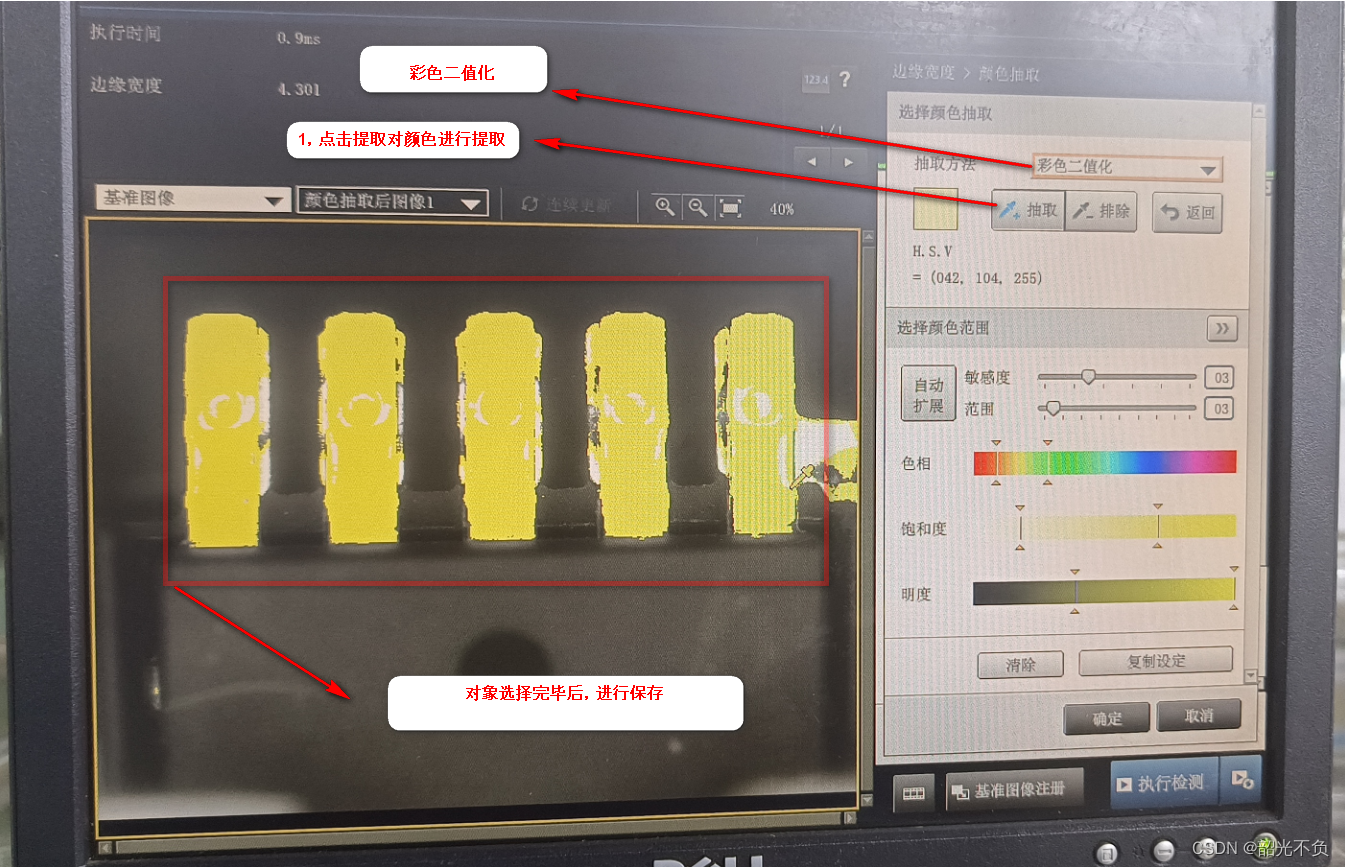
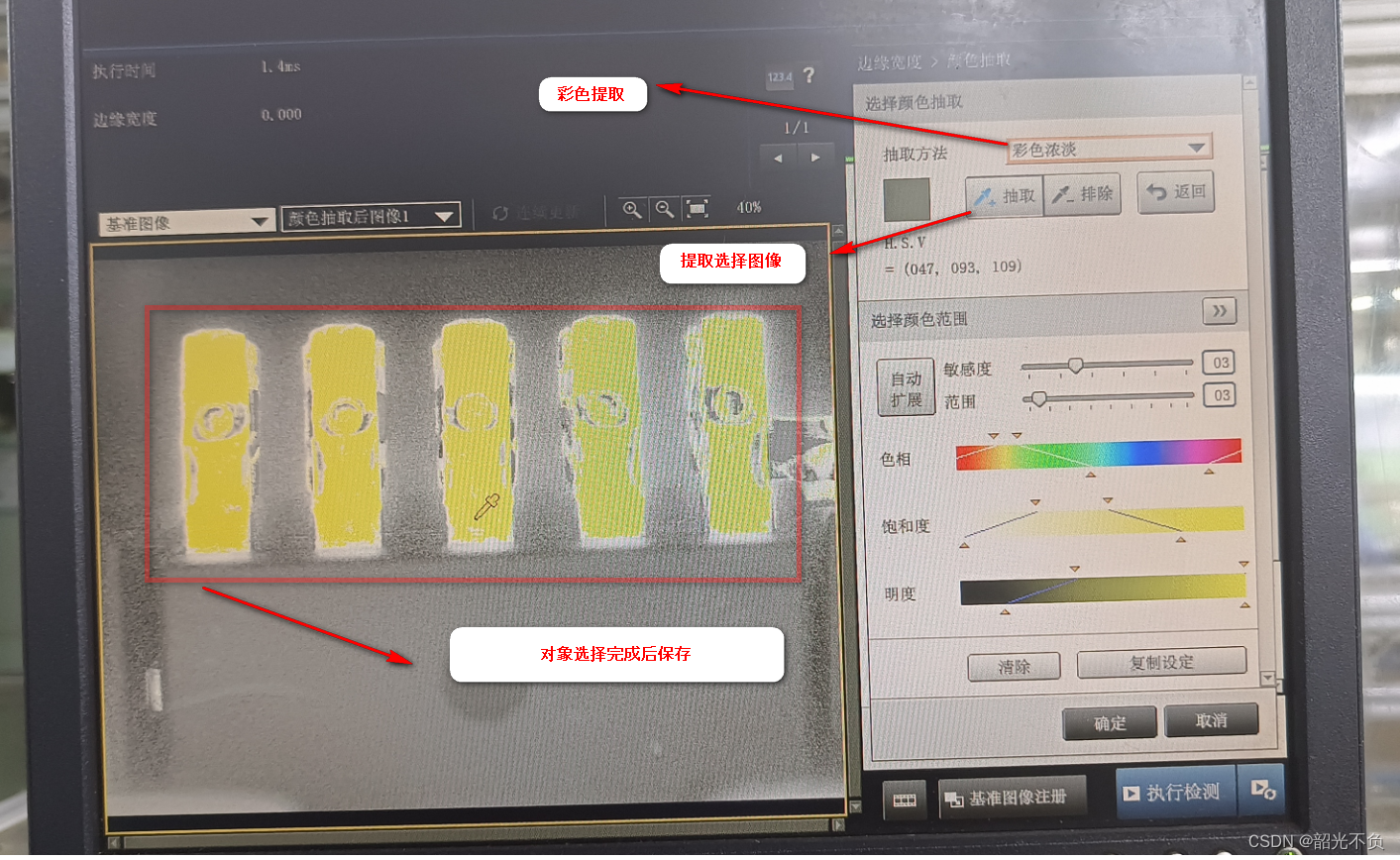
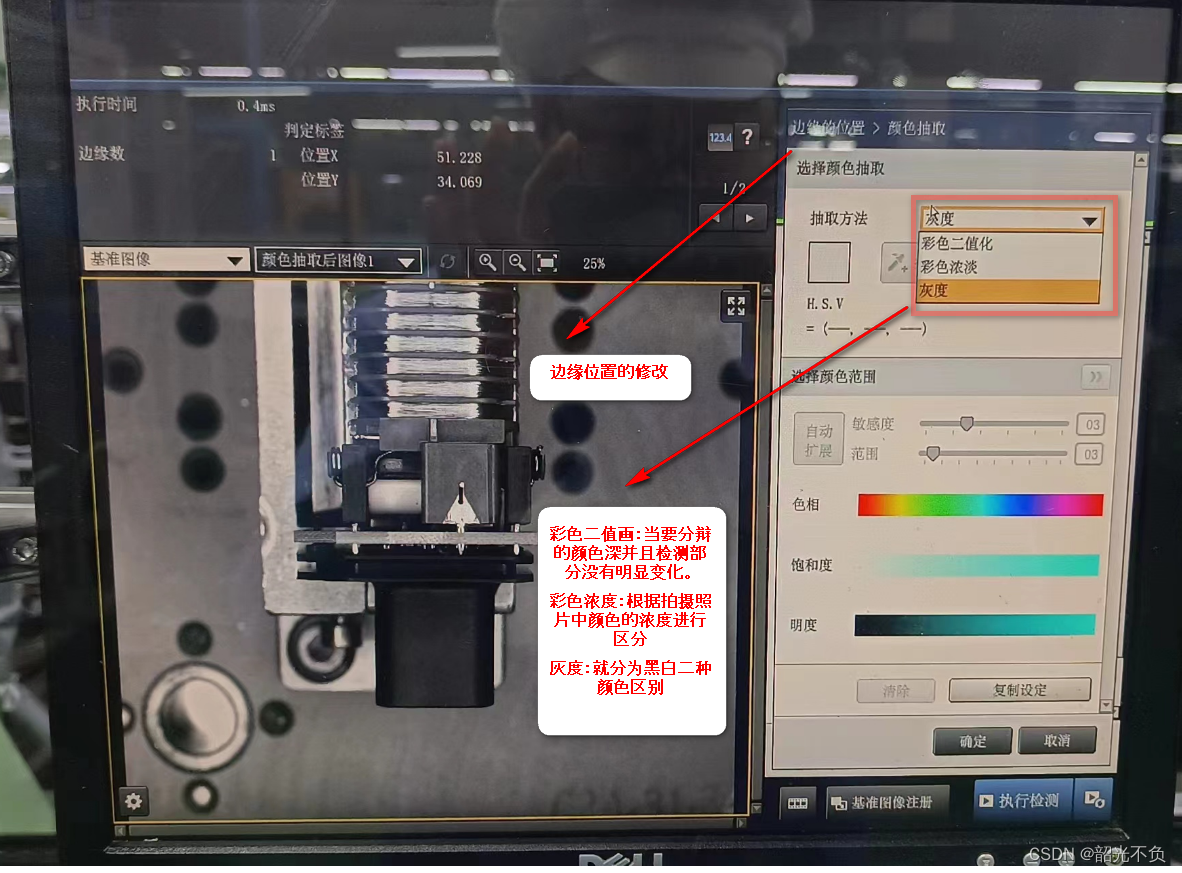
2,颜色提取(灰色, 彩色二值化,彩色浓淡 :根据图像上的分辩好坏来选择功能)
编辑
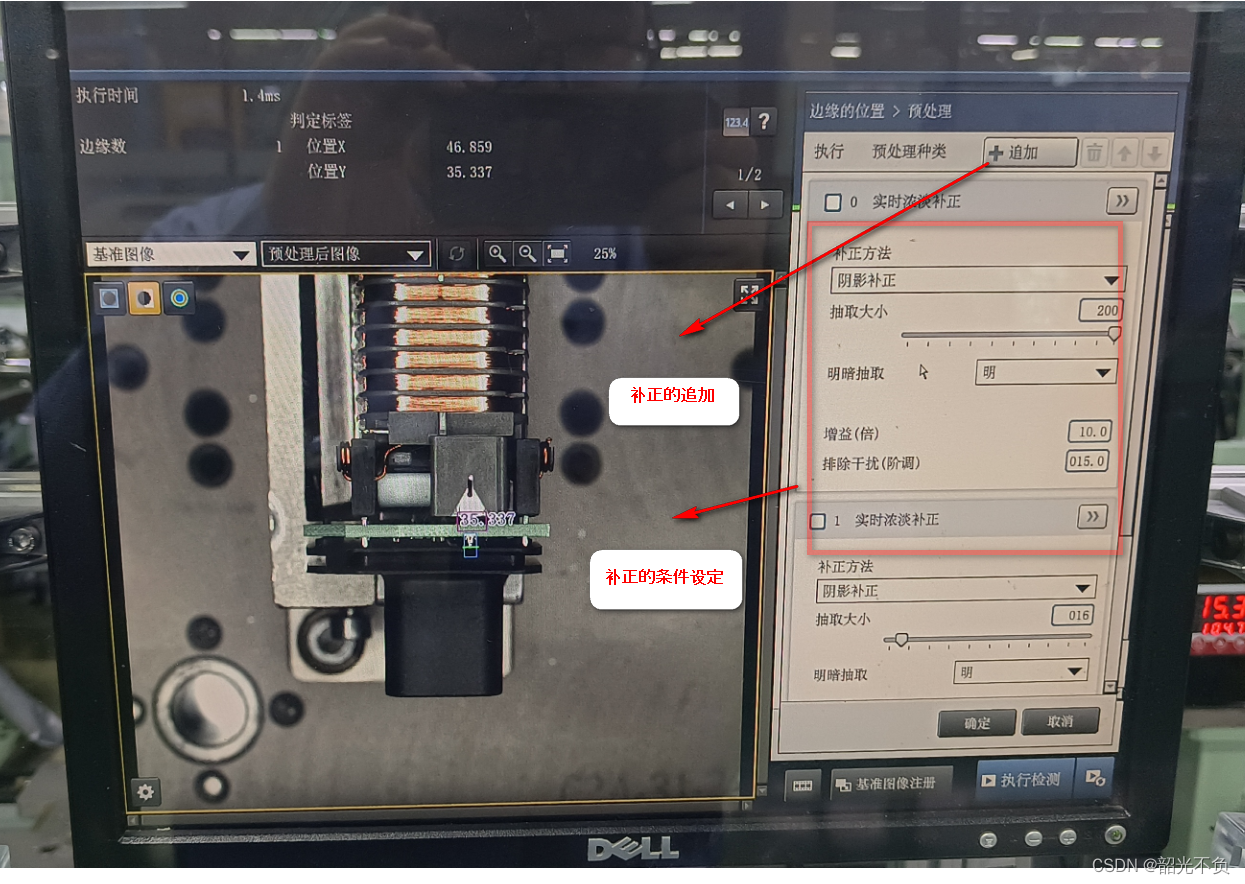
预处理
CCD后期图像修改(当设备在运行时,不可以进入设置模式。防止CCD不拍摄,导致产品没有检测流出)
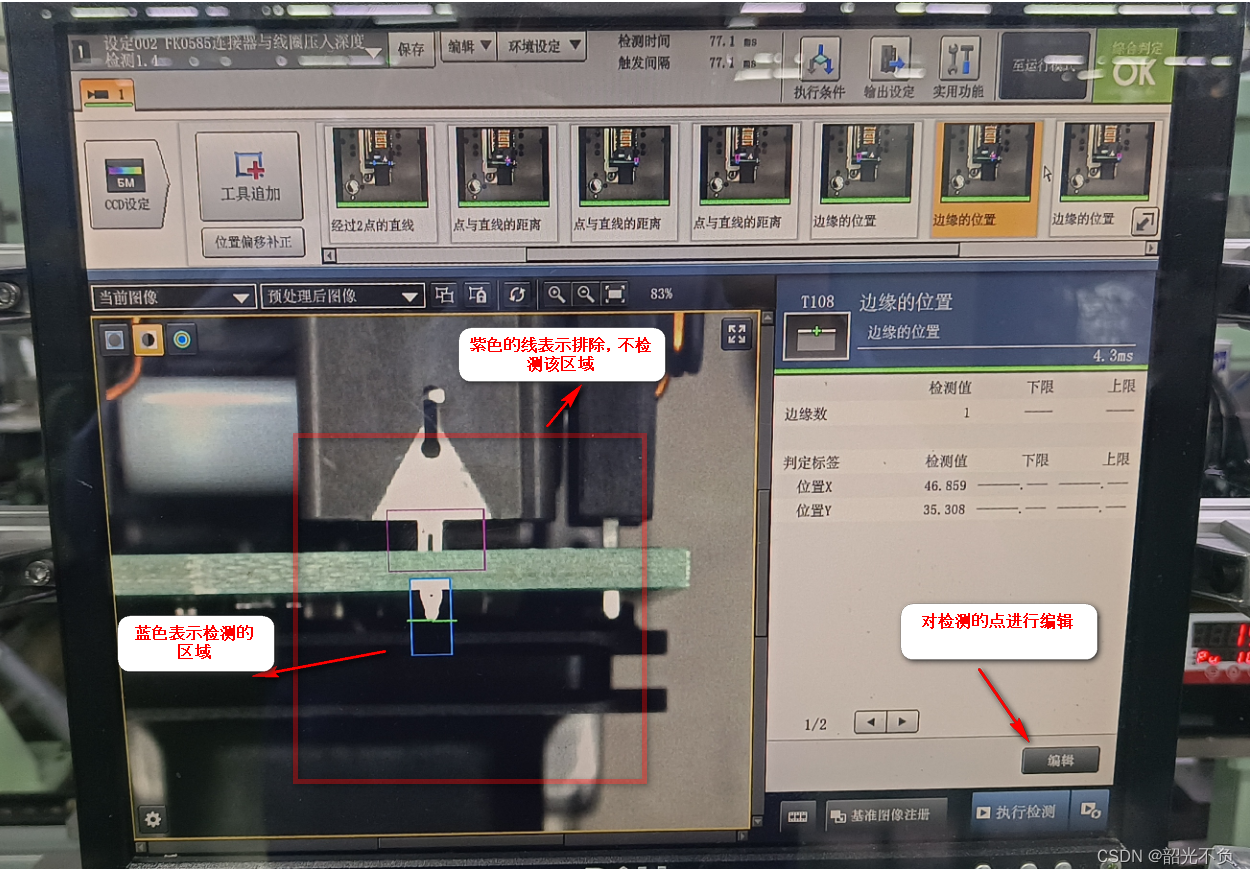
边缘位置的设定(关系到后面检测的直线的清晰与偏移)
修改方法(点击编辑)
效果:边缘位置也没有发生偏移
点的设置(边缘功能用法2)
点到直线的距离设置
编辑直线
选择直线点1与点2(二个点确定一条直线,与上面直线设置有关)
判定设置
硬件部分

软件部分
CCD新相机的调试处理(更换相机处理,都要点执行检测来查看图像变化)
问题:新相机拍摄出现黑屏,图像拍摄不清晰,(可以点击图像,向下转动鼠标的滚轮(Mouse Wheel)放大图像)
解决办法:进入CCD的设定,选择对应的相机,调试好参数(如下图)
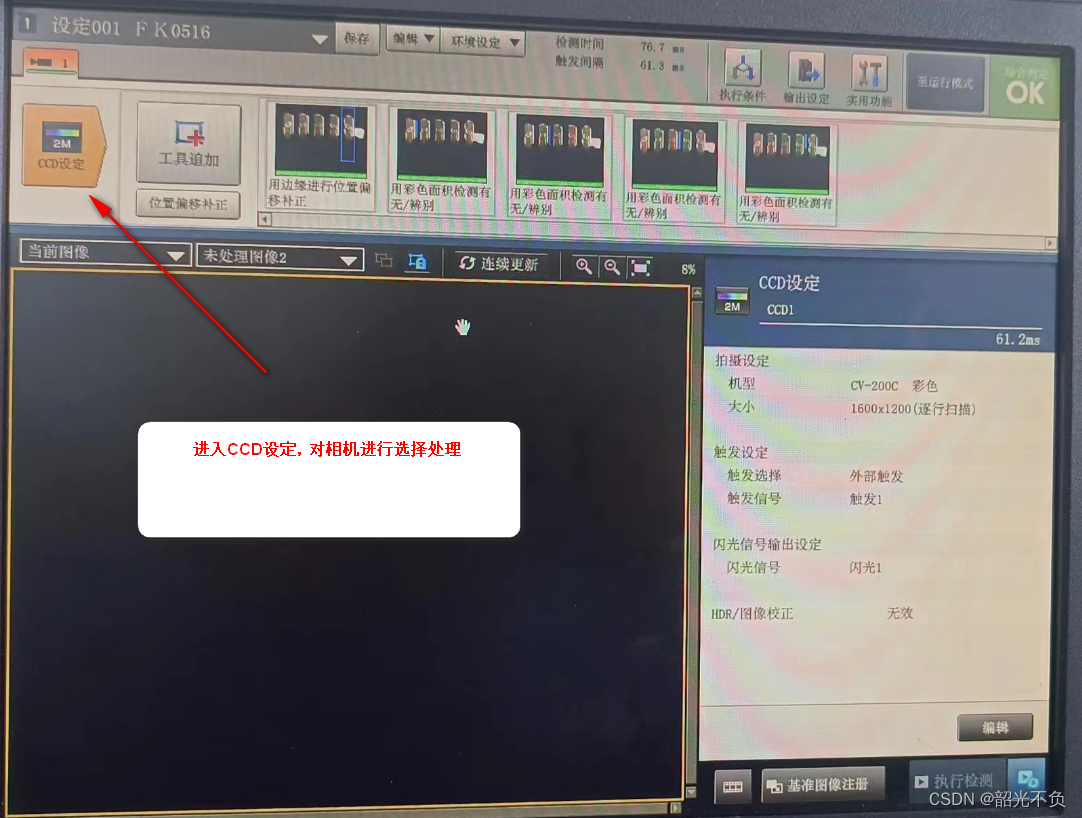
选择好相机型号,选择拍摄图片的大小,拍照速度当太快或者太慢都影响照片的清晰。CCD的敏感度也会对拍摄的照片清晰度有影响。

触发模式的选择(外部触发)
在图像处理领域,CCD(Charge-Coupled Device)是一种常用的图像传感器。内部触发和外部触发是CCD图像传感器的两种触发模式。
1. 内部触发(Internal Trigger):在内部触发模式下,CCD图像传感器会根据预设的时间间隔连续地自动进行图像采集。即刻或按照设定的时间间隔,CCD会自动触发一次图像采集过程,无需外部信号的干预。这种模式适用于需要连续采集图像的应用,如视频录制和实时监测。
2. 外部触发(External Trigger):在外部触发模式下,CCD图像传感器需要接收来自外部的触发信号才能进行图像采集。外部信号可以是一个电平触发信号(例如通过接触器、传感器等控制)、脉冲触发信号(例如通过报警器或计时器等)或其他形式的外部事件触发信号。这种模式适用于需要在特定事件或条件下进行图像采集的应用,如测量、检测和高速图像捕捉等。
内部触发适用于连续的图像采集,而外部触发适用于需要在特定条件下触发图像采集的情况。

照明设定:选择闪光灯数量,光亮强度
执行条件设定

CCD基准图像处理
基准图像处理的选择与拍摄
CCD的基准图像要求可能因应用的需求而有所不同,但通常包括以下几个方面:
1. 良好的对比度:基准图像应具有良好的对比度,以确保图像中的目标物体与背景之间有足够的区分度。这通常可以通过合适的照明和图像处理算法来实现。
2. 均匀的照明:基准图像应具有均匀的照明,避免出现过度曝光或低光照区域,以确保图像中的细节信息能够被正确捕捉。
3. 适当的焦距:基准图像应具有适当的焦距,以确保图像中的目标物体清晰可见。过度或不足的焦距都可能导致图像细节模糊或不清晰。
4. 适当的图像分辨率:基准图像的分辨率应符合具体应用的要求。分辨率过低可能导致细节丢失,分辨率过高可能造成数据处理和存储压力。
5. 无失真或畸变:基准图像应尽量避免失真或畸变,以保持图像中物体的真实形态和尺寸。这需要确保光学系统和图像采集设备的准确性。
基准图像的要求主要取决于具体应用的需求和目标,例如质量检测、图像识别、计量等。在实际应用中,需要根据具体情况进行图像采集、处理和分析,以获得符合要求的基准图像。
工具的选择与添加(重要!!!)
对功能的选择(选择类型,选择功能)

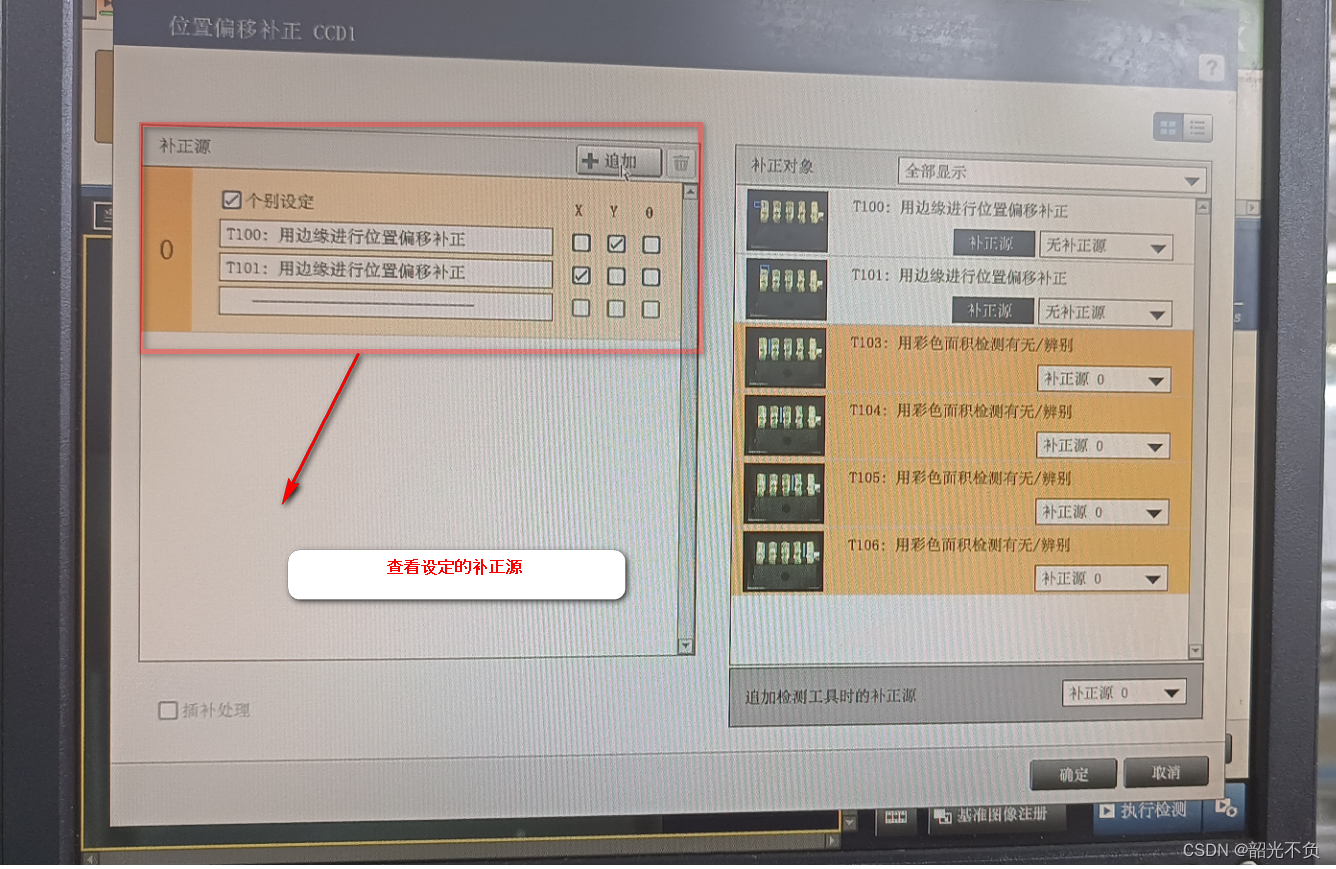
位置偏移补正(重要!!!)
CCD(Charge-Coupled Device)位置偏移补正主要用于纠正CCD相机在采集图像时可能出现的位置偏移或畸变问题。
在实际应用中,CCD相机的位置可能受到机械振动、温度变化、制造偏差等因素的影响,导致拍摄的图像出现位置偏移或畸变,这会影响图像质量和识别、检测等应用的准确性。
因此,为了纠正图像中的位置偏移或畸变,需要进行位置偏移补正。位置偏移补正可以通过软件或硬件实现,大致的步骤包括:
1. 采集基准图像:拍摄一张没有位置偏移或畸变的基准图像作为参考。
一般选择基准图像

2. 分析图像偏移:通过与基准图像进行比较,计算图像中物体在x、y方向上的实际偏移量。
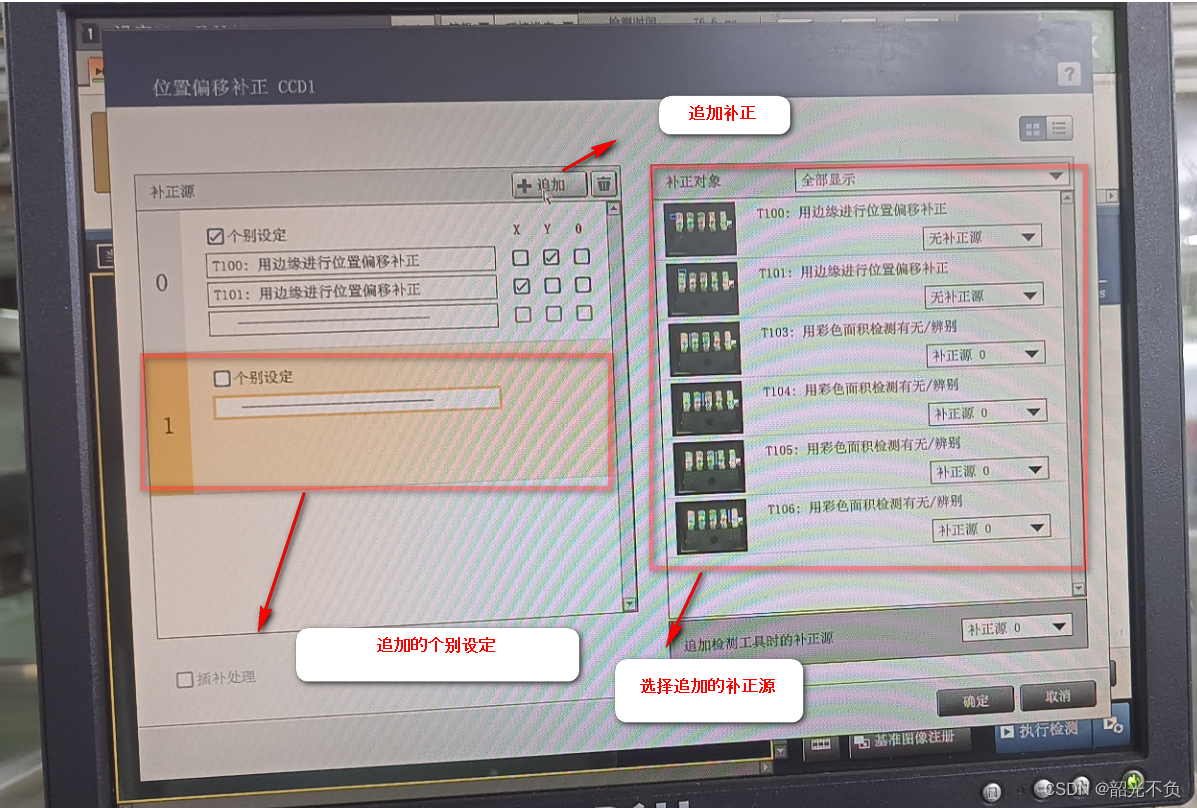
3. 计算位置偏移量:根据分析结果,计算并确定每个像素点的偏移量,并建立偏移矫正模型。
4. 进行位置偏移补正:对采集的每张图像进行位置偏移补正,并输出补正后的图像。
通过位置偏移补正,可以提升图像的质量,并保证图像分析及后续处理的准确性和可靠性。
工具功能展示(边缘宽度)
选择工具,选择功能追加边缘宽度功能
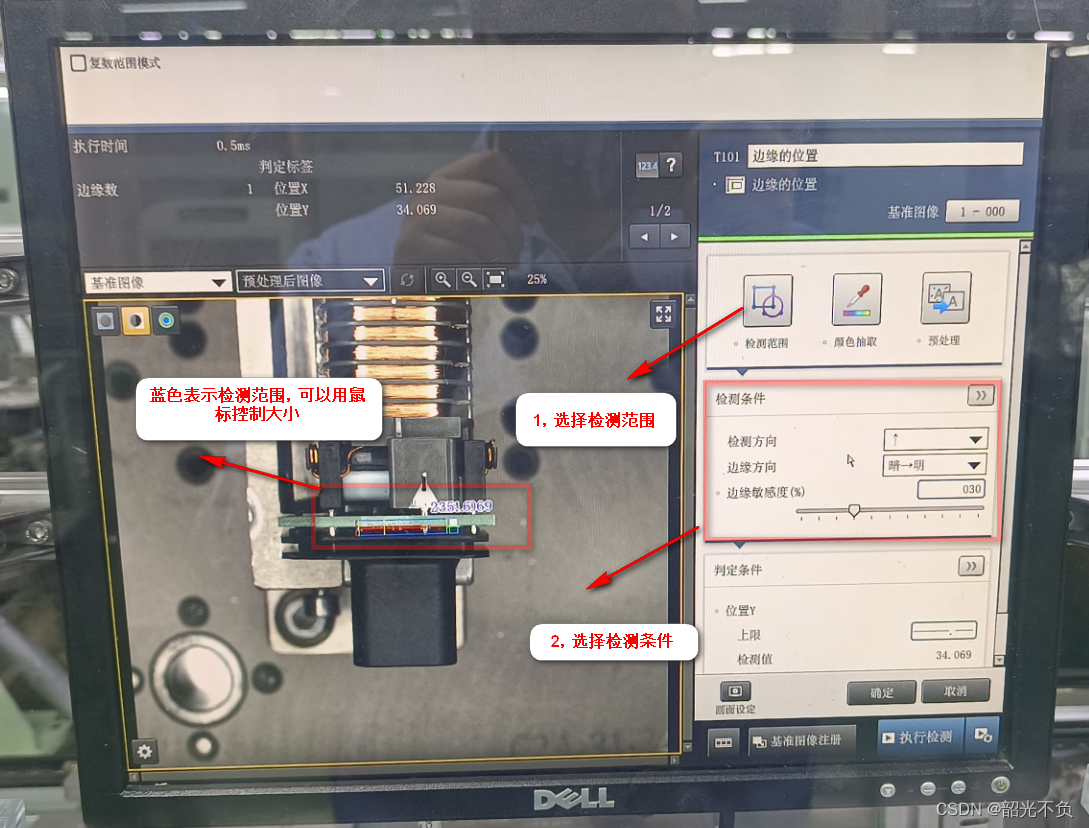
1,选择检测范围

2,颜色提取(灰色, 彩色二值化,彩色浓淡 :根据图像上的分辩好坏来选择功能)
灰色
彩色二值化
彩色浓淡
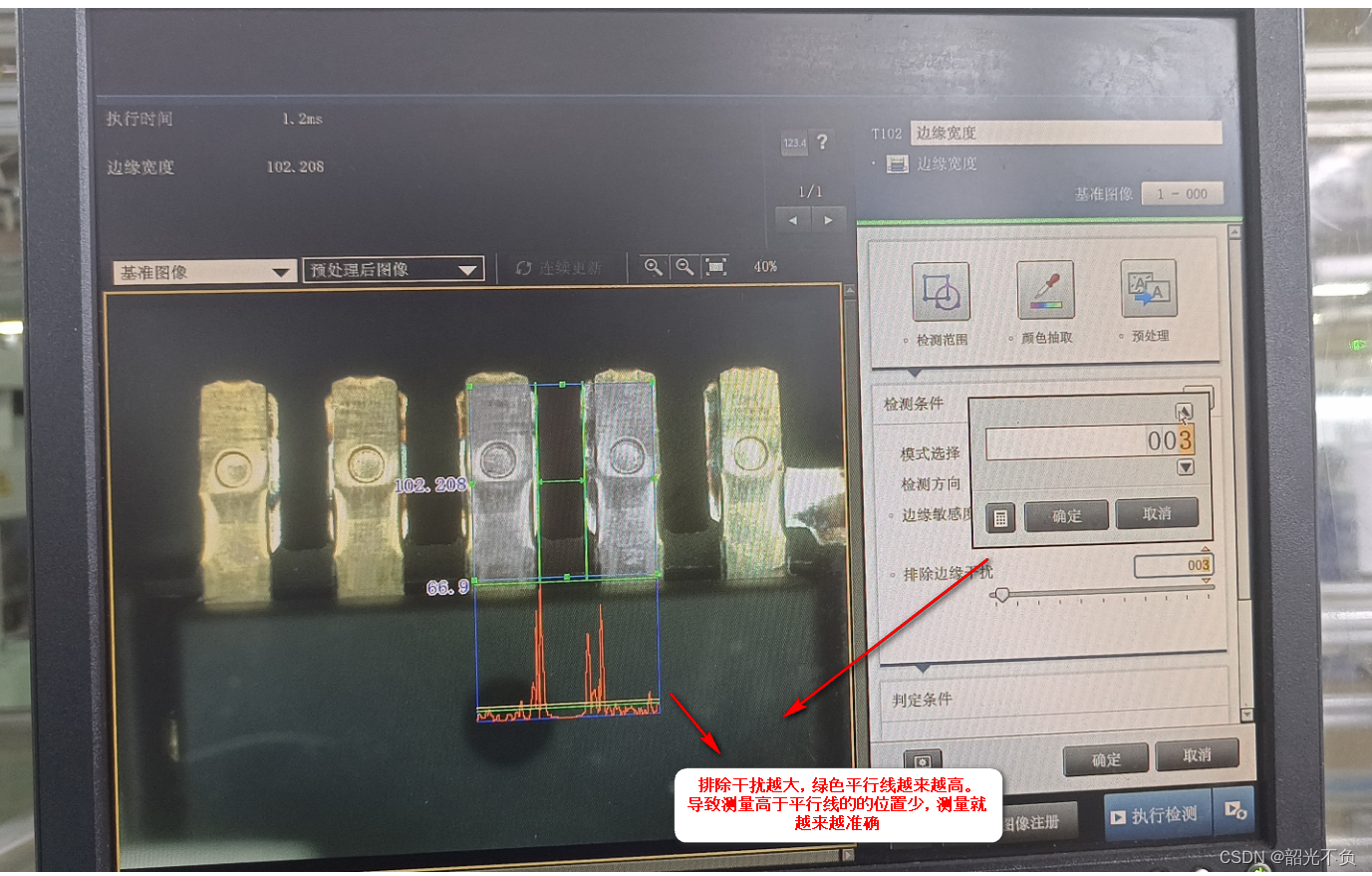
预处理
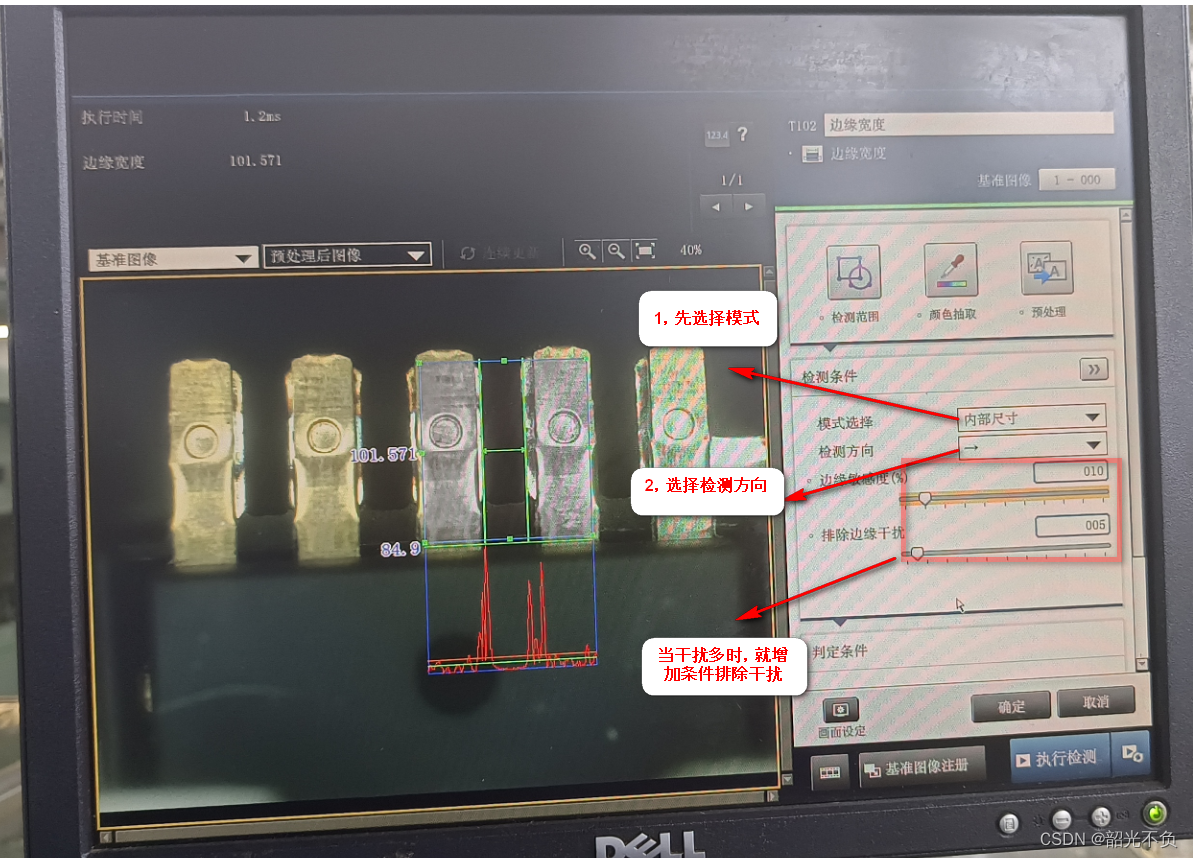
排除干扰越大,绿色平行线越来越高。导致测量高于平行线的的位置少,测量就越来越准确
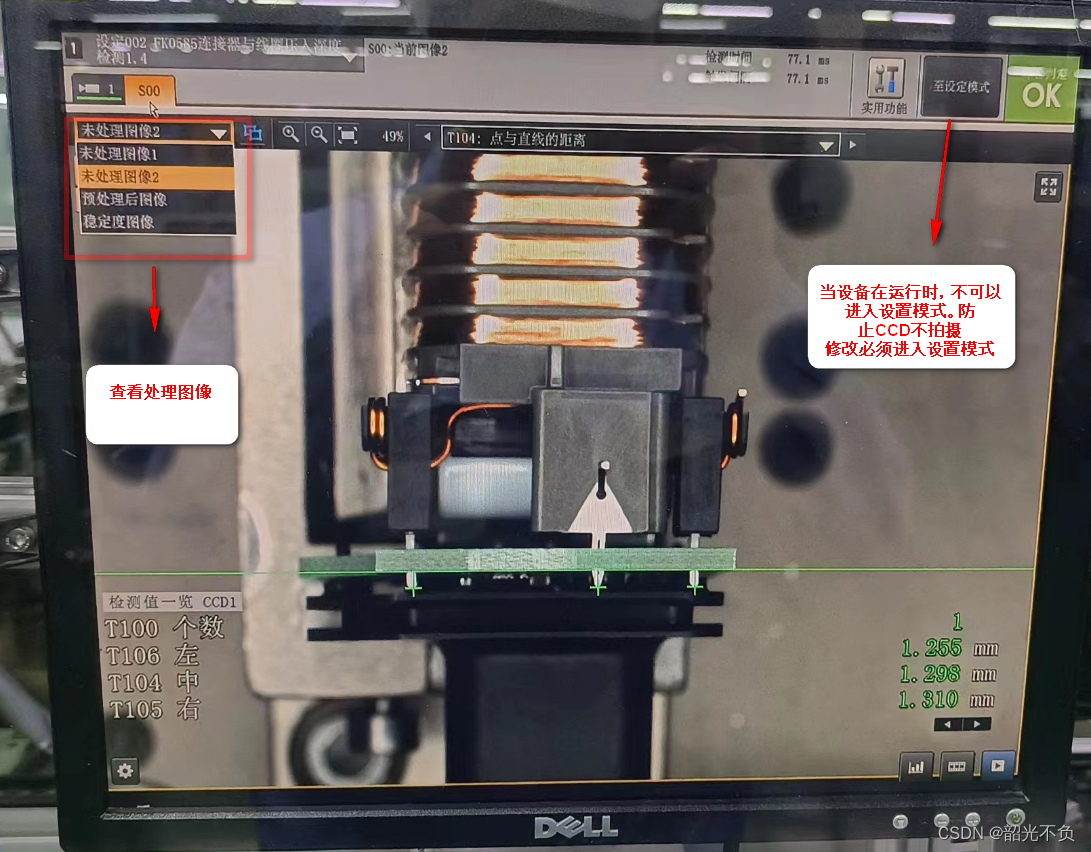
CCD后期图像修改(当设备在运行时,不可以进入设置模式。防止CCD不拍摄,导致产品没有检测流出)
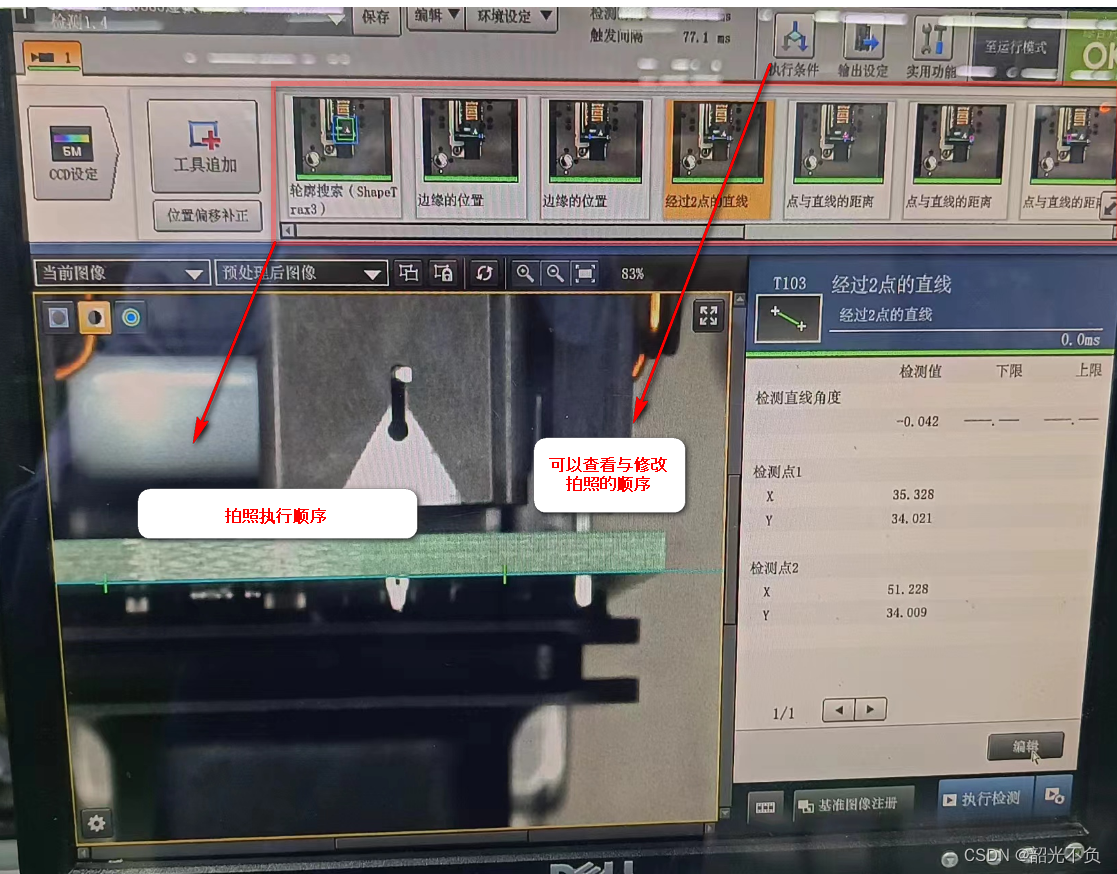
先确定执行拍照的顺序(例:CCD修改点到直线的距离)
边缘位置的设定(关系到后面检测的直线的清晰与偏移)

修改方法(点击编辑)
效果:边缘位置也没有发生偏移
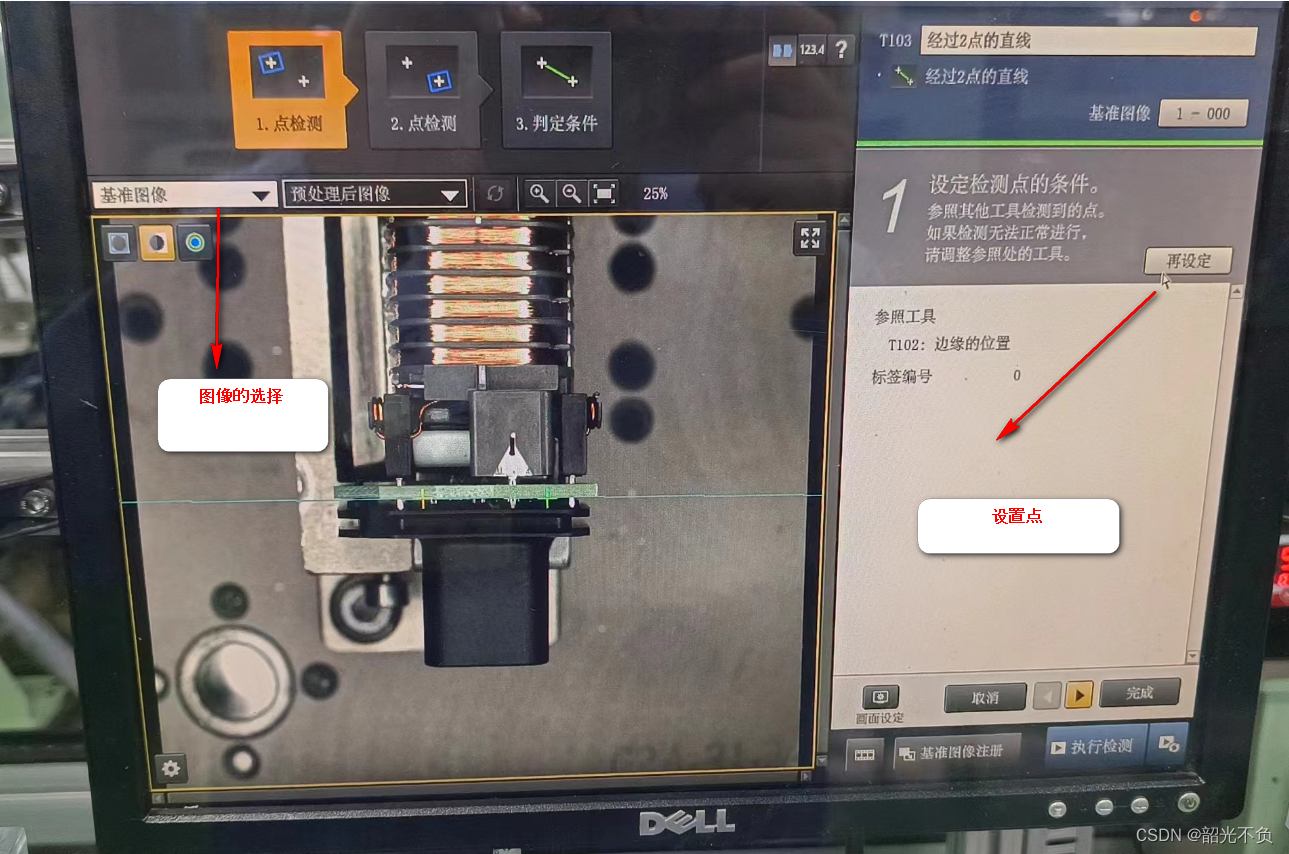
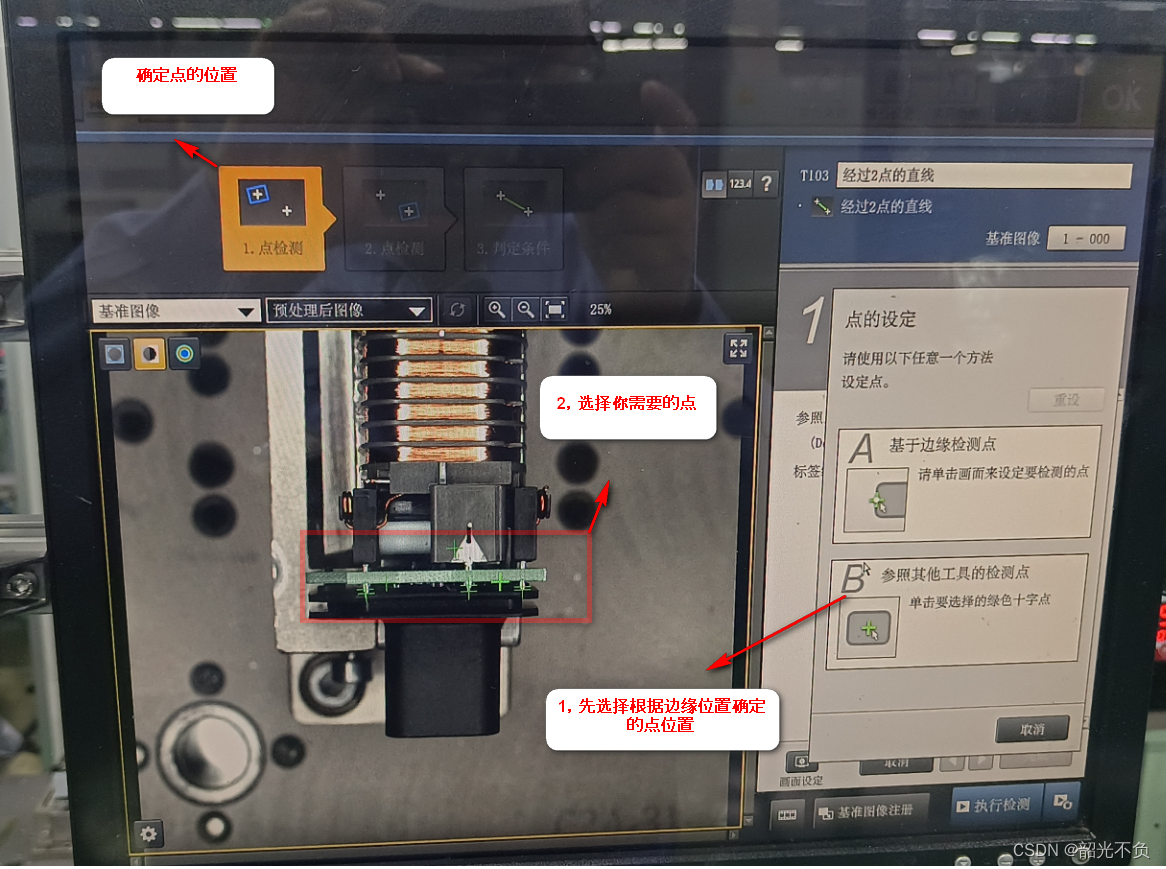
点的设置(边缘功能用法2)

点到直线的距离设置
编辑直线
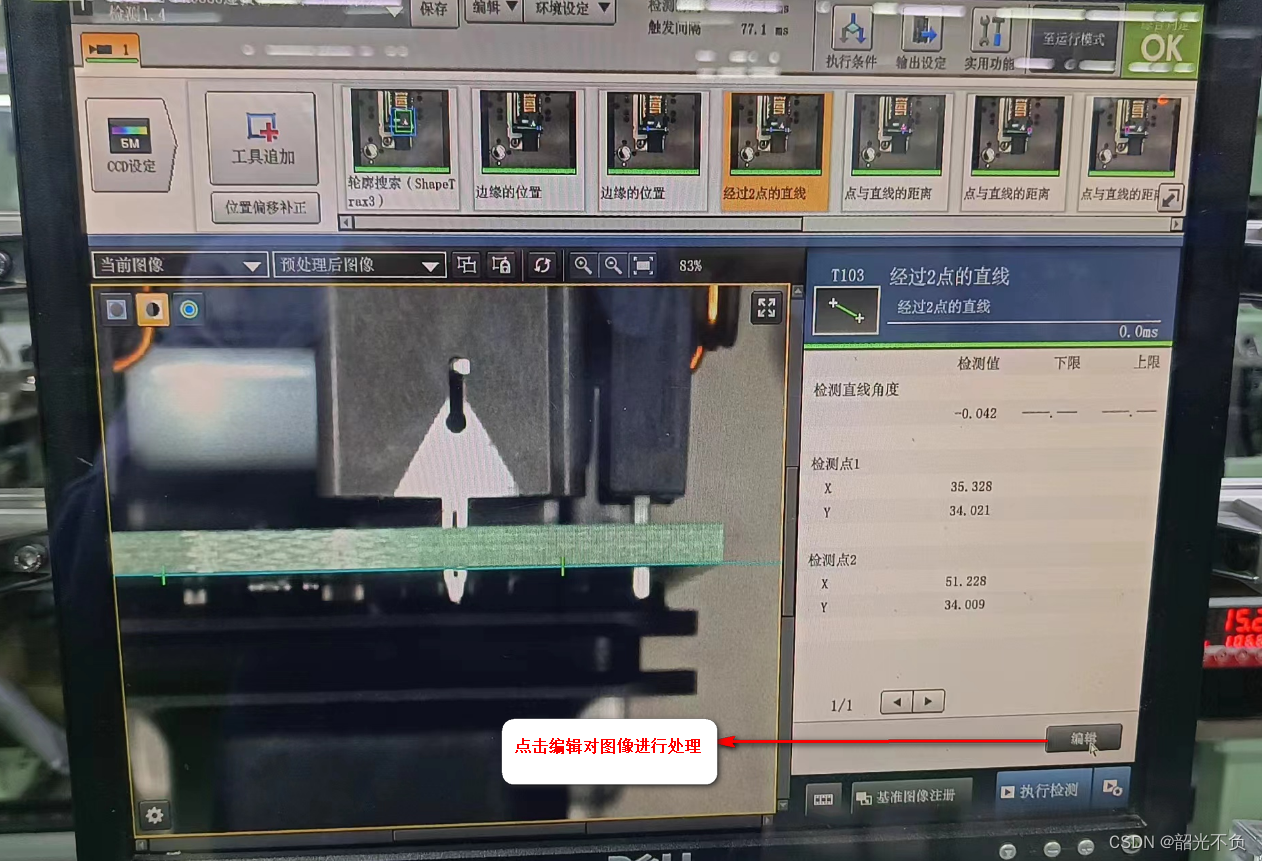
选择直线点1与点2(二个点确定一条直线,与上面直线设置有关)
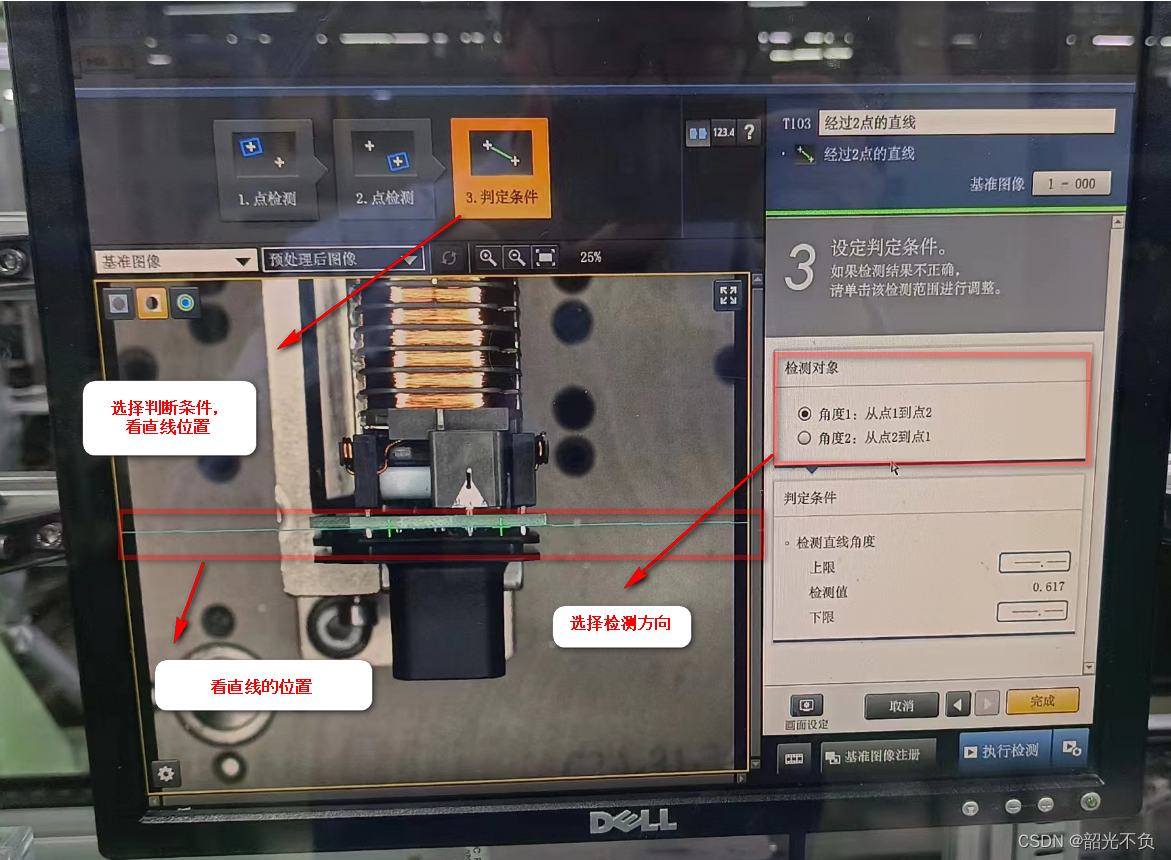
判定设置
这篇关于工业性能CCD图像处理+的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






