本文主要是介绍倍福运动控制库功能介绍,百晓生知识处理引擎发布,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
原创文章,转载请注明出处,百晓生知识处理引擎整理,等我把自定义字典整理好,后面可以免费给大家注解Tc3的运动控制程序,有Tc程序看不懂的,扔过来就行。
https://blog.csdn.net/gkbxs/article/details/116741477
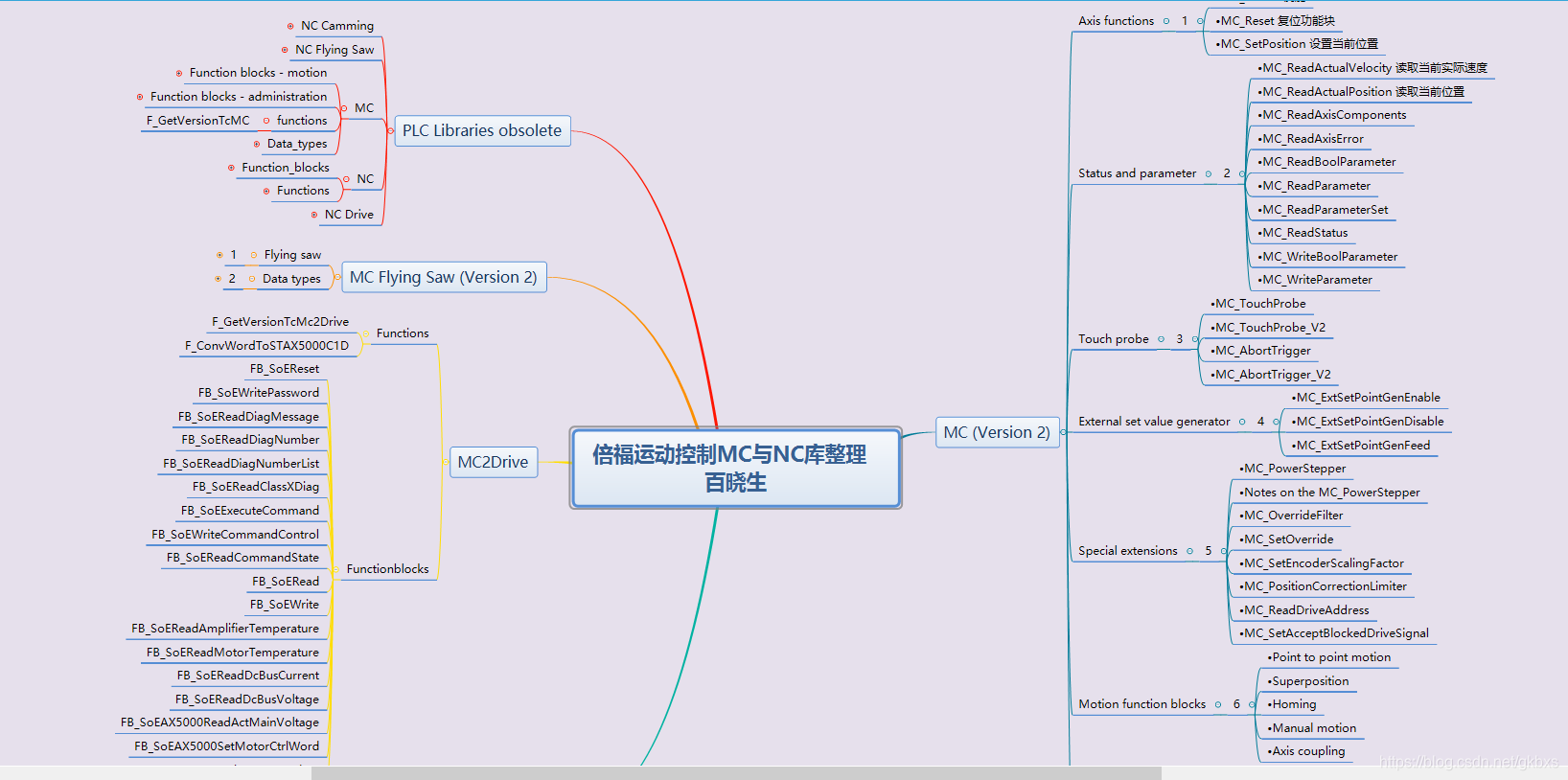
【MC_Power激活轴的软件启用。可以为两个行驶方向或仅一个方向启用。在“状态”下,轴的输出操作准备就绪。01】
【MC_Reset重置NC轴。在许多情况下,这也会导致连接的驱动设备复位。根据总线系统或驱动器类型,在某些情况下,可能需要对驱动器设备进行单独的复位。02】
【MC_SetPosition将当前轴位置设置为可参数化的值。03】
【在绝对模式下,实际位置设置为参数化绝对位置值。在相对模式下,实际位置由参数化位置值偏移。在这两种情况下,设置轴的设置位置,以便保留可能存在的任何滞后误差。开关选项.ClearPositionLag可以用来清除滞后误差。相对模式可用于在运动过程中更改轴位置。】
【实际轴位置可以通过功能块MC_ReadActualPosition读取。实际位置值是从驱动放大器返回到轴的位置值。04】
【实际轴速度值可用功能块MC_ReadActualVelocity读取。实际速度值是从驱动放大器返回到轴的速度值。05】
【功能块MC_ReadAxisComponents可用于读取有关轴的子元素编码器、驱动器和控制器的信息。06】
【MC_ReadAxisError读取轴的轴误差。07】
【功能块MC_readboolpareter用于读取布尔轴参数。08】
【功能块MC_ReadParameter用于读取轴参数。09】
【功能块MC_ReadParameterSet可用于读取轴的整个参数集。10】
【MC_ ReadStatus确定轴的当前工作状态,并在功能块输出端发出信号。11】
【更新后的操作状态额外存储在状态输出数据结构和坐标轴状态axis数据结构。这意味着在每个PLC循环开始时只需读取一次操作状态,然后可以通过坐标轴状态. Axis变量(type})已经包含一个函数块MC_ReadStatus的实例。轴参考[91]这意味着可以在PLC循环开始时通过调用Axis.ReadStatus文件.】
【轴的布尔参数可以用功能块MC_WriteBoolParameter写入。12】
【轴参数可以用功能块MC_WriteParameter写入。13】
【布尔轴参数可以通过功能块MC_WriteBoolParameterPersistent持久写入。14】
【轴参数可以通过功能块MC_writeparameterPersistent持久写入。15】百晓生知识处理引擎自动收集发布 BestMrRight
【要写入的持久参数存储在初始化列表中。在系统启动时,系统首先从最初配置的值开始,并在任务开始之前用初始化列表中的持久数据覆盖这些值。当注册新的系统配置时,初始化列表被清除。然后,系统从新配置中未更改的数据开始。】
【功能块MC_TouchProbe记录数字信号时的轴位置(测量探针功能)。位置通常不直接记录在PLC环境中,而是通过外部硬件锁存器记录,因此高度精确且与周期时间无关。功能块控制该机构并确定外部记录的位置。与TwinCAT 2相比,功能块被扩展。它具有与现有功能块MC_TouchProbe_V2相同的功能。16】
【功能块MC_AbortTrigger取消由MC_TouchProbe启动的探测循环。MC_ TouchProbe通过激活外部编码器或驱动硬件中的位置闩锁来启动测量探针循环。在触发信号激活位置锁闩之前,可以使用功能块MC_AbortTrigger终止程序。如果测量探针循环已成功完成,则无需调用此功能块。17】
【轴的外部设定点发生器可以通过功能块MC_ExtSetPointGenEnable打开。然后,轴从其循环轴接口采用设定值规范(轴.PlcToNc.ExtSetPos,ExtSetVelo,ExtSetAcc和ExtSetDirection)。外部设定点生成器通常是一个PLC功能块,用于计算轴的循环设定值,因此可以替代NC轴中的内部设定点生成器。18】
【轴的外部设定点发生器可通过功能块MC_ExtSetPointGenDisable关闭(外部设定点禁用)。轴不再采用循环轴接口的设定值规范(轴.PlcToNc.ExtSetPos,ExtSetVelo,ExtSetAcc和ExtSetDirection)外部设定点生成器通常是一个PLC功能块,用于计算轴的循环设定值,因此可以替代NC轴中的内部设定点生成器。19】
【MC_ExtSetPointGenFeed函数用于将外部设定点生成器的设定值输入轴。该函数将数据即时复制到循环轴接口(fExtSetPos、fExtSetVelo、fExtSetAcc和nExtSetDirection)。MC_ExtSetPointGenFeed的函数结果未使用,因此始终为FALSE。外部设定点生成器通常是一个PLC功能块,用于计算轴的循环设定值,因此可以替代NC轴中的内部设定点生成器。20】
【功能块MC_OverrideFilter可用于将由数字组成的未过滤的覆盖值(例如,模拟输入端子的电压值)转换为与循环轴接口(PlcToNc)匹配的过滤的覆盖值(DWORD在0…1000000范围内)。此过滤覆盖也可用百分比表示(LREAL在0…100%范围内)。21】
【轴的超控可通过功能块MC_SetOverride指定。22】
【MC_SetEncoderScalingFactor在静止或运动时更改轴的活动编码器的比例因子。23】
【变化可以是绝对的,也可以是相对的。此模式仅适用于静止状态,因为在绝对模式下,比例因子的变化会导致位置不连续。在相对模式下,同时调整内部位置偏移,以便不出现不连续性。请注意,运动过程中的干预会导致实际轴速度发生变化,而实际速度保持不变。因此,在运动过程中只能实现微小的变化。】
【MC_ReadDriveAddress读取连接到轴的驱动设备的ADS访问数据。访问设备时需要此信息,例如特殊参数化。24】
【功能块MC_位置校正限制器在轴的实际位置写入校正值(位置校正值)。根据校正模式,数据直接或过滤到轴。25】
【有些情况下,驱动器不再遵循设定的NC值,例如,如果轴到达限位开关。NC将这种情况解释为错误,驱动停止。在某些情况下,用户可能希望故意引发这种情况,例如为了移动到限位开关进行参考运行。在驱动器不再遵循设置的NC值的情况下,可以使用函数MC_SetAcceptBlockedDriveSignal临时防止NC轴产生错误。26】
【功能块MC_SelectControlLoop在轴的控制回路之间切换。先决条件是在系统配置中的轴下方创建了两个或多个控制回路。27】
【MC_MoveAbsolute开始定位到绝对目标位置,并监视整个移动路径上的轴移动。一旦到达目标位置,“完成”输出即被设置。否则,输出“CommandAborted”,或者在出现错误的情况下,设置输出“error”。28】
【MC_MoveAbsolute主要用于线性轴系统。对于模数轴,位置不是模数位置,而是连续绝对坐标系中的绝对位置。】
【如果在轴参数中显式激活此选项,则可以将运动命令应用于耦合的从属轴。运动命令(如MC_MoveAbsolute)会自动导致轴解耦,然后执行该命令。在这种情况下,唯一可用的缓冲模式是“中止”。】
【MC_MoveRelative根据当前设置的位置启动相对定位程序,并监控整个移动路径上的轴移动。一旦到达目标位置,“完成”输出即被设置。否则,输出“CommandAborted”,或者在出现错误的情况下,设置输出“error”。29】
【如果在轴参数中显式激活此选项,则可以将运动命令应用于耦合的从属轴。一个运动命令,如MC_MoveRelative,然后自动导致轴解耦,然后执行命令。在这种情况下,唯一可用的缓冲模式是“中止”。】
【MC_MoveAdditive根据上一个目标位置指令启动相对定位过程,而不管是否达到该指令。一旦到达目标位置,“完成”输出即被设置。否则,输出“CommandAborted”,或者在出现错误的情况下,设置输出“error”。如果不知道最后一个目标位置或轴连续移动,则根据轴的当前设置位置执行移动。30】
【功能块MC_MoveModulo用于执行定位操作,该操作涉及轴的模位置。模数旋转基于可调轴参数模数因子(例如360°)。根据“方向”输入,区分三种可能的启动类型。正向定位、反向定位、沿最短路径定位。如果在轴参数中显式激活此选项,则可以将运动命令应用于耦合的从属轴。一个运动命令,如MC_MoveModulo,然后自动导致轴解耦,然后执行命令。在这种情况下,唯一可用的缓冲模式是“中止”。31】
【MC_MoveVelocity以指定的速度和方向开始连续运动。可以通过停止命令停止移动。32】
【一旦达到恒定速度,就会设置InVelocity输出。一旦达到恒定速度,块功能就完成了,并且不再对运动进行进一步的监控。如果在加速阶段中止命令,则输出“CommandAborted”,或者在发生错误时,设置输出“error”。】
【如果在轴参数中显式激活此选项,则可以将运动命令应用于耦合的从属轴。运动命令(如MC_MoveAbsolute)会自动导致轴解耦,然后执行该命令。在这种情况下,唯一可用的缓冲模式是“中止”。】
【MC_MoveContinuousAbsolute开始定位到绝对目标位置,并监视整个移动路径上的轴移动。在目标位置达到恒定的终点速度,并保持不变。一旦到达目标位置,“InEndVelocity”输出即被设置。否则,输出“CommandAborted”,或者在出现错误的情况下,设置输出“error”。一旦达到目标位置,功能块的功能终止,轴不再受监控。33】
【MC_MoveContinuousRelative以相对距离开始定位,并监视整个移动路径上的轴移动。在目标位置达到恒定的终点速度,并保持不变。一旦到达目标位置,“InEndVelocity”输出即被设置。否则,输出“CommandAborted”,或者在出现错误的情况下,设置输出“error”。一旦到达目标位置,块功能完成,轴不再受监控。34】
【MC_Halt使用定义的制动斜坡停止轴。与}不同的是,轴不会被进一步的移动命令锁定。因此,在制动斜坡期间或停止后,可以通过进一步的命令重新启动轴。MC_站[67]如果在轴参数中显式激活此选项,则可以将运动命令应用于耦合的从属轴。一个运动命令,如MC_Halt,然后自动导致轴解耦,然后执行该命令。在这种情况下,唯一可用的缓冲模式是“中止”。35】
【MC_Stop使用定义的制动斜坡停止轴,并针对其他运动命令将其锁定。因此,功能块适用于特殊情况下的停止,在这种情况下,将防止进一步的轴移动。36】
【同时,其他运动命令将阻止轴。轴停止后,只有当执行信号设置为FALSE时,才能重新启动轴。在执行负边缘后,需要几个循环来释放轴。在此阶段,“忙”输出保持为真,必须调用功能块,直到“忙”变为假。轴的锁定被}取消。MC_复位[17]或者,可以使用}停止轴而不锁定。对于正常的运动序列,MC_Halt更可取。MC_暂停[65]如果在轴参数中显式激活此选项,则可以将运动命令应用于耦合的从属轴。一个运动命令,如MC_Stop,然后自动导致轴解耦,然后执行该命令。36+】
【当轴已经在移动时,MC_MoveSuperImposed开始相对叠加移动。当前移动不会中断。一旦叠加运动完成,“完成”输出即被设置。原始从属移动可继续激活,并由相关移动功能块监控。37】
【当考虑以相同速度运行的两个轴时,叠加的功能变得很清楚。如果其中一个轴被MC_MoveSuperImposed叠加,则它将位于另一个轴之前或之后,由“距离”参数确定。一旦叠加运动完成,两个轴之间的“距离”将保持不变。】【MC_MoveSuperImposed可以在单轴上执行,也可以在主轴或从轴上执行。在从轴中,叠加运动仅作用于从轴。如果该功能应用于主轴,则从轴将模拟主轴由于轴耦合而产生的叠加运动。由于MC_MoveSuperImposed执行相对叠加移动,因此次级移动命令的目标位置会随距离而变化。叠加运动取决于主运动的位置。这意味着,主运动的速度变化也会导致叠加运动的速度变化,如果主运动停止,则叠加运动是无效的。“Options”参数可用于指定在主运动停止时是中止还是继续叠加运动。】
【MC_ AbortSuperposition功能块终止由}开始的叠加运动,而不停止从属轴运动。38】
【使用功能块MC_Home执行轴参考运行。在TwinCAT系统管理器中使用编码器参数“Reference mode”(参考模式)设置参考模式。根据所连接的编码器系统,可能有不同的序列(另请参阅TwinCAT 3 ADS接口NC文档中增量编码器的参考模式)。39】
【功能块MC_Jog允许通过手动键移动轴。按键信号可以直接与“向前点动”和“向后点动”输入相连。所需的操作模式通过“模式”输入指定。也可以使用微动模式,在按下键时将轴移动指定距离。可以根据操作模式指定运动的速度和动力学。40】
【功能块MC_GearIn激活线性主从耦合(齿轮耦合)。功能块接受分子/分母格式的固定传动比。41】
【从轴可以在静止时耦合到主轴。使用此功能块,无法与移动的主轴同步。飞锯功能块MC_GearInVelo或MC_GearInPos可用于此目的。】
【从轴可以与功能块}解耦。如果从机在移动时解耦,那么它将保持其速度,并且可以使用}或}停止。机械减速器[82]机械减速器停止[67]机械减速器停止[65]或者,可以使用具有动态可变传动比的功能块}。MC_GearInDyn[81]】
【功能块MC_GearInDyn激活线性主从耦合(齿轮耦合)。传动比可在每个PLC循环期间动态调整。因此,可以建立受控的主/从耦合。“加速度”参数在传动比变化较大的情况下具有限制作用。42】
【从轴可以与功能块}解耦。如果从机在移动时解耦,那么它将保持其速度,并且可以使用}或}停止。机械减速器[82]机械减速器停止[67]机械减速器停止[65]或者,可以使用具有动态可变传动比的功能块}。MC_GearIn[79]】
【功能块MC_GearOut停用主从耦合。43】
【功能块MC_GearInMultiMaster用于激活多达四个不同主轴的线性主/从联轴器(齿轮联轴器)。传动比可在每个PLC循环期间动态调整。奴隶运动由叠加的主人运动决定。“加速度”参数在传动比变化较大的情况下具有限制作用。44】
【从轴可以与功能块}解耦。如果从机在移动时解耦,那么它将保持其速度,并且可以使用}停止。主减速器[82]主减速器停止[67]如果使用的主机少于四个,则可以将每个参数“Master2”的空数据结构传输到“Master4”(轴ID必须为0)。】
【功能块MC_HaltPhasing导致受控停止从轴相对于主轴的相移。根据“jerk”参数中设置的制动延迟的恒定jerk值,“Halt”始终为jerk limited。MC_HaltPhasing通过MC_PhasingAbsolute或MC_phasingarelative终止叠加运动。45】
【功能块MC_PhasingAbsolute可用于设置主轴和从轴之间的相移。功能块执行从轴的叠加运动,从而在主和从轴之间设置位置差“相移”。46】
【动态值“速度”、“加速度”和“减速度”是指执行相移时的叠加运动。根据“jerk”参数中设置的恒定jerk值,运动始终受到jerk限制。此值同时适用于“加速”和“减速”。】
【功能块MC_PhasingRelative可用于设置主轴和从轴之间的相移。功能块执行从轴的叠加运动,从而通过距离“相移”改变主从之间的位置差。47】
【动态值“速度”、“加速度”和“减速度”是指执行相移时的叠加运动。根据“jerk”参数中设置的恒定jerk值,运动始终受到jerk限制。此值同时适用于“加速”和“减速”。】
倍福beckhoff系列文章
TwinCAT图解教程之modbusRTU使用
TwinCAT3 库功能块与函数大全 百晓生知识引擎整理
倍福运动控制库功能介绍,百晓生知识处理引擎发布
TwinCAT HMI使用经验,总结,心得
倍福TwinCAT3 Ads错误快查
Beckhoff倍福EtherCAT IO端子类型简介
倍福TwinCAT全体系知识库
beckhoff倍福TwinCAT HMI使用笔记,BestMrRight整理
TwinSAFE 倍福安全模块逻辑功能
TwinCAT3加不上路由ADS的几种可能
TwinCAT控制器CX51X0产品选型
TwinCAT TC3_Controller_Toolbox功能块
TwinCAT3各版本下载路径
倍福beckhoff知识库
TwinCAT 机器视觉Vision函数库
这篇关于倍福运动控制库功能介绍,百晓生知识处理引擎发布的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




