本文主要是介绍Telerik UI for WPF全新版本——拥有Office2019高对比度主题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
几个月前发布了Telerik UI for WPF的R3 2021版本,您是否有机会测试全新的 Office2019 主题内置 HighContrast 颜色变化(灵感来自 Windows 10 中的黑色高对比度模式)? 本文将介绍新变体以及主题的一些新功能。
Telerik UI for WPF R3 2021 SP1最新版下载

您可以直接在WPF应用程序中查看它的外观,只需在 InitializeComponent 方法之前添加以下行:
Office2019Palette.LoadPreset(Office2019Palette.ColorVariation.HighContrast);
结果如下:
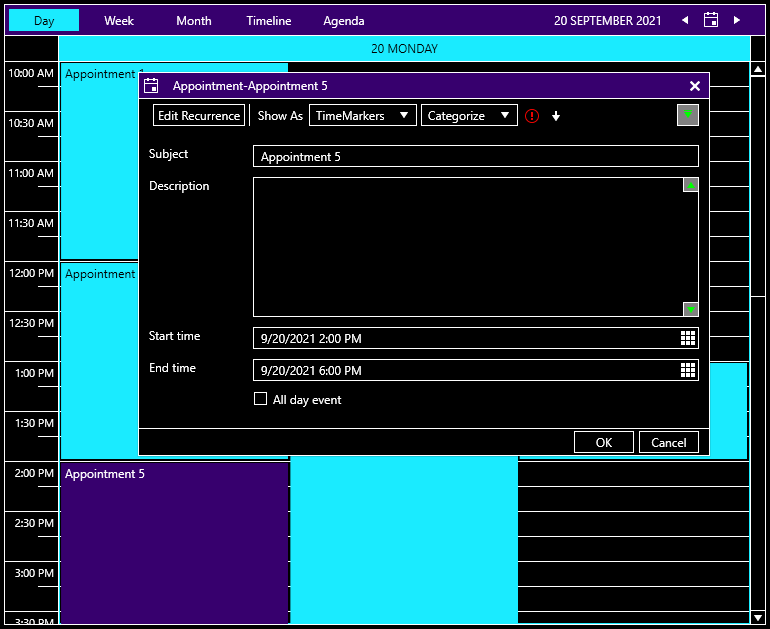
什么是高对比度?
高对比度的主要目的是增加文本的易读性和提高可读性,对于某些人来说,低对比度的文本可能难以阅读,对于那些有视力障碍的人来说甚至是不可能的。 如果您的应用程序针对大量受众,您的用户可以从高对比度主题中受益。
在您的应用程序中使用高对比度主题还有许多其他原因,从提高屏幕元素的可读性到减少视觉噪音、偏头痛、眼睛疲劳等。
高对比度主题有一个简化的 UI,与其他深色主题相比,它使用了一小组颜色:
- 文本和背景的对比色
- 禁用文本为绿色
- 减少的灰色集
Office2019 主题有哪些新变化?
1. 在此主题中,我们首次公开了可用于在元素禁用时自定义前景的主题调色板画笔 - DisabledForegroundBrush、DisabledIconBrush 和 DisabledCheckedForegroundBrush。 通过这种方式,您可以轻松更改组件的禁用样式。

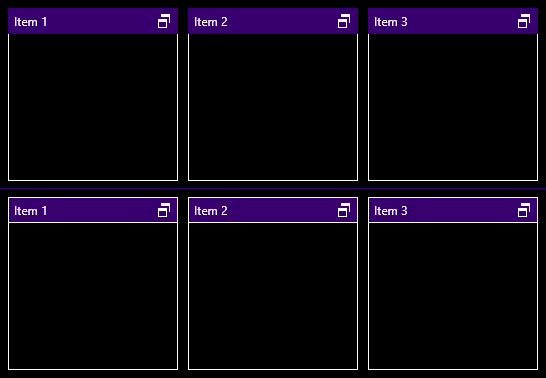
2. 由于 Office2019 主题为其标题使用背景,因此在它们周围添加边框非常耗时。 但现在不同了! 使用调色板中的新 HeaderBorderThickness 属性,您可以非常轻松地包装所有标题元素。 您可以使用以下设置修改 HeaderBorderThickness:
Office2019Palette.Palette. HeaderBorderThickness = new Thickness(1);
看看它的样子:
3. 最后我们使用 SelectedUnfocusedBackgroundBrush 扩展了调色板,它负责未聚焦元素(例如,GridViewRow、TreeListViewRow 和 TreeViewItem)的背景颜色。

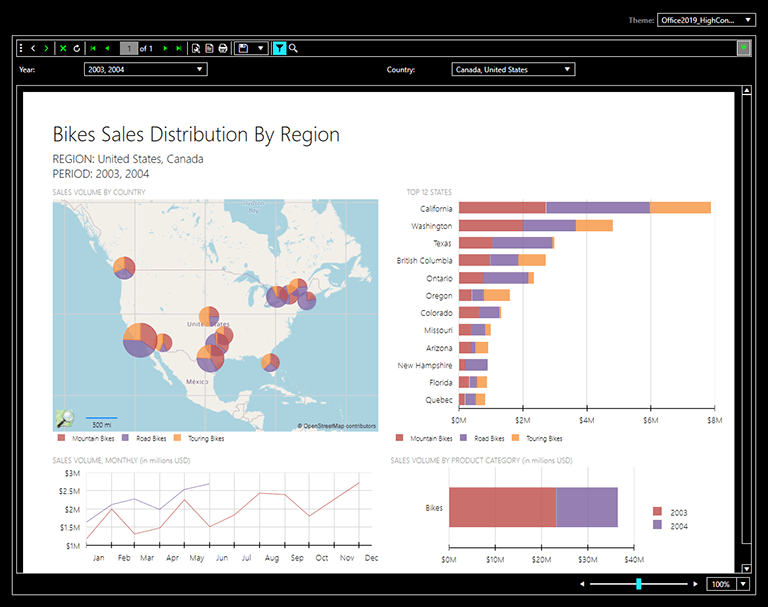
使用 Office2019 高对比度主题和 Telerik Report Viewer交付报表
我们有 Telerik .NET ReportViewer 控件,可帮助为您的桌面应用程序创建出色的交互式报表。 您可以找到具有最新 HighContrast 颜色变化的所有报表,先看一眼:
Telerik UI for WPF | 下载试用
Telerik UI for WPF拥有超过100个控件来创建美观、高性能的桌面应用程序,同时还能快速构建企业级办公WPF应用程序。UI for WPF支持MVVM、触摸等,创建的应用程序可靠且结构良好,非常容易维护,其直观的API将无缝地集成Visual Studio工具箱中。
了解最新Kendo UI最新资讯,请关注Telerik中文网!
这篇关于Telerik UI for WPF全新版本——拥有Office2019高对比度主题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








