本文主要是介绍伪距单点定位概念与原理、算例分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
一、概念与原理
1.伪距观测值
2.为何被称为"伪距" ?
3.单点定位的概念
4.伪距单点定位的原理
5.伪距单点定位的优缺点
二、伪距观测方程
三、伪距观测方程线性化
1.泰勒级数展开
2.得到线性化后的观测方程
3.在某历元接收机同时观测n颗卫星,列出观测方程
四、最小二乘迭代计算
1.最小二乘解的计算
2.根据卫星高度角定权确定权矩阵P
五、算例分析
伪距单点定位流程图如下:

一、概念与原理
1.伪距观测值
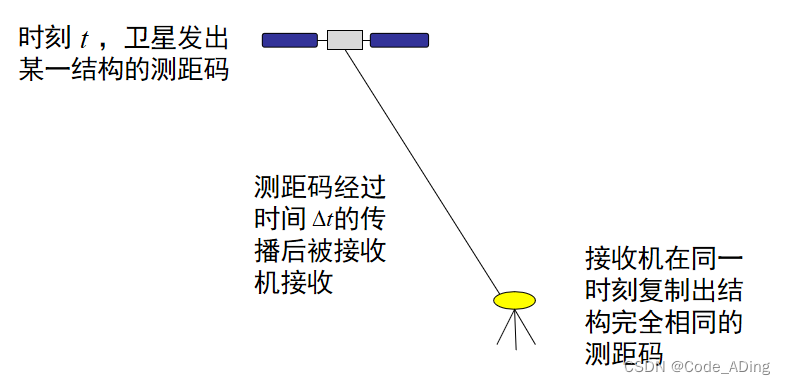
伪距观测值:由卫星发射的测距码信号到达接收机天线的传播时间乘以光速得出的量测距离。
接收机复制的复制码经过时间延迟器延迟一定时间 与测距码对齐。则延迟时间
就等于卫星信号的传播时间
,而卫星与接收机的距离等于时间乘以真空中的光速 c。
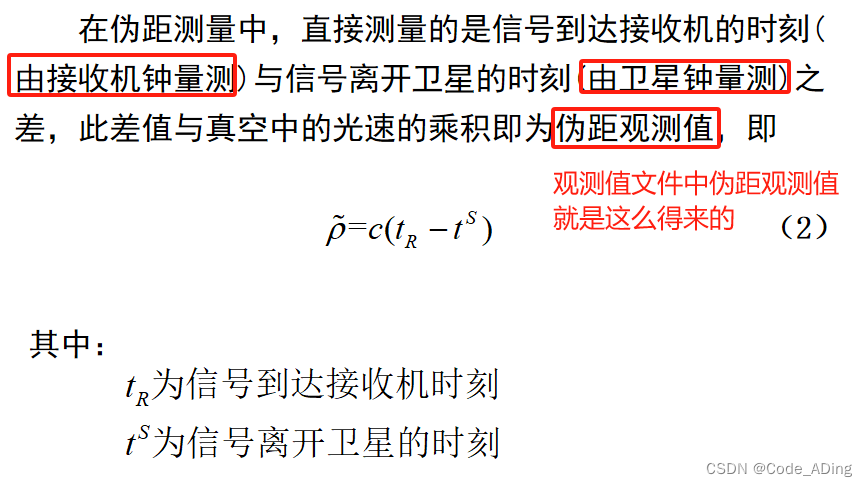
2.为何被称为"伪距" ?
- 伪:与真实不同的事物
- 伪距:与真实距离不同的距离
- 由于卫星钟、接收机钟的误差以及卫星信号经过电离层和对流层中的延迟影响,得出的距离不等于卫星到接收机的几何距离,因此被称为伪距。

3.单点定位的概念
- 根据卫星星历以及一台GNSS接收机的观测值来独立确定用户在地球坐标系绝对位置的方法称为单点定位,也叫绝对定位。
4.伪距单点定位的原理
- 伪距单点定位是由GNSS接收机在某一时刻测得四颗以上卫星的伪距及已知的卫星位置,采用空间后方交会的方法求定接收机天线所在点的三维坐标。
5.伪距单点定位的优缺点
- 优点:定位速度快、无多值性、一台接收机即可完成独立定位、外业观测组织方便、数据处理简单、可作为载波相位测量中解算整周模糊度的辅助资料。
- 缺点:精度不高
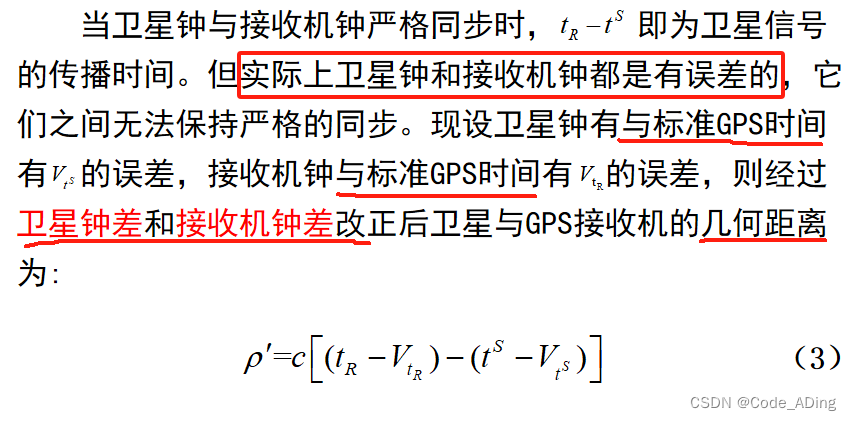
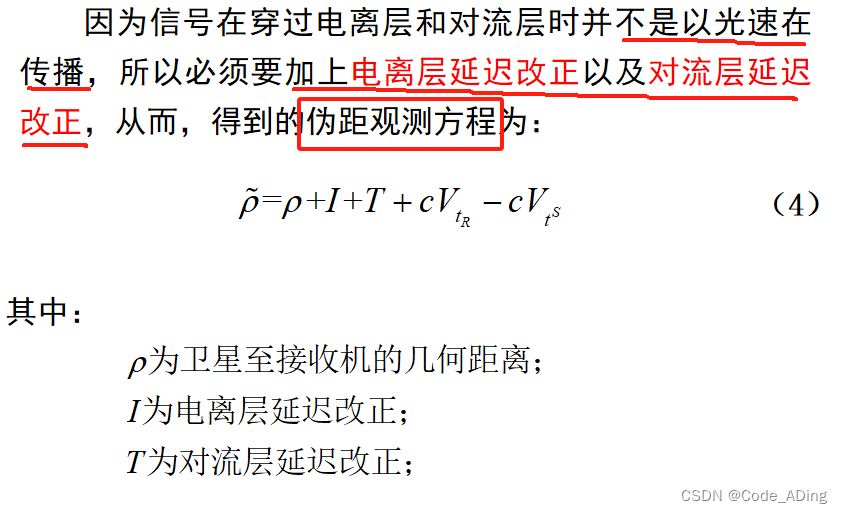
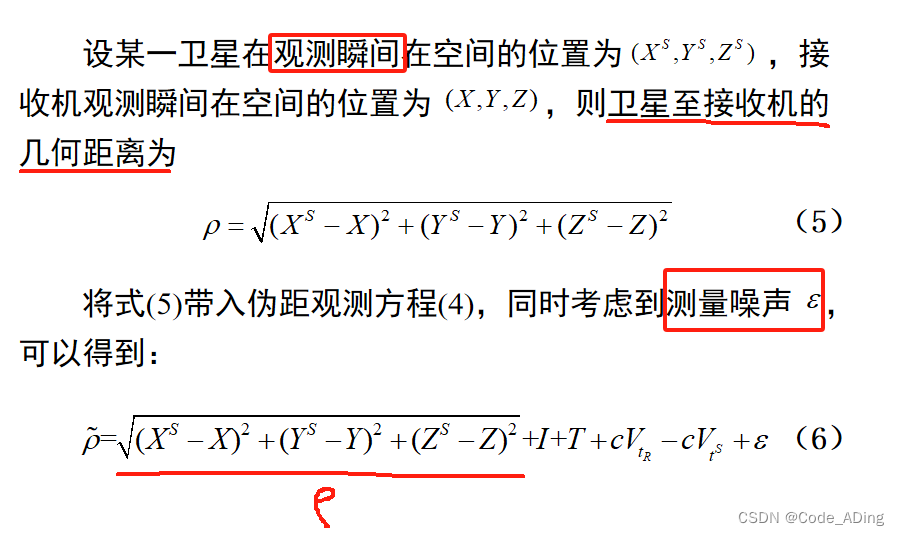
二、伪距观测方程
1.
2.
3.
4.
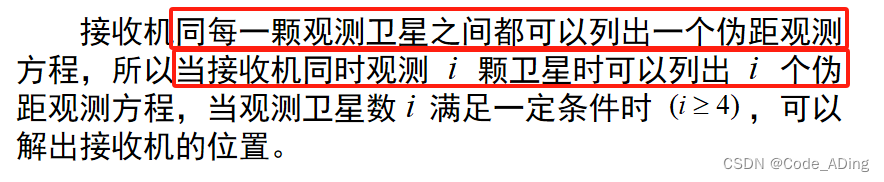
5.为何要四颗或四颗以上卫星?
答:伪距观测方程一共有四个未知量:接收机位置三维坐标(X,Y,Z),以及接收机钟差。只有四颗或四颗以上卫星才能列出足够的伪距观测方程,解出未知量。
三、伪距观测方程线性化
伪距观测方程为非线性方程,直接求解接收机位置比较困难,需要对伪距观测方程通过泰勒级数展开进行线性化。
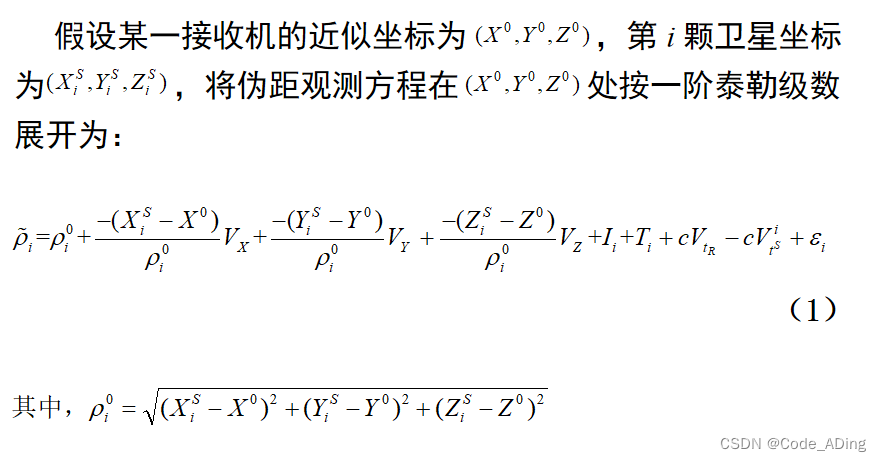
1.泰勒级数展开
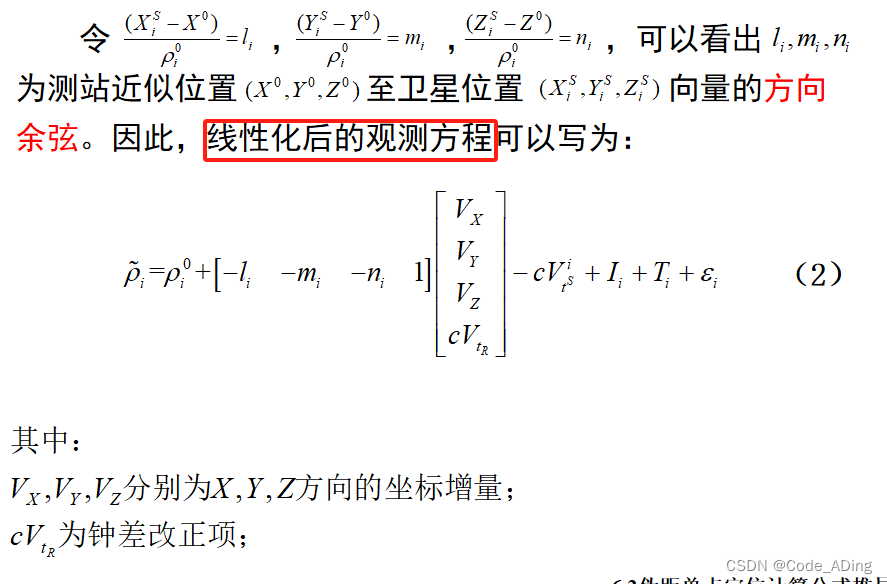
2.得到线性化后的观测方程
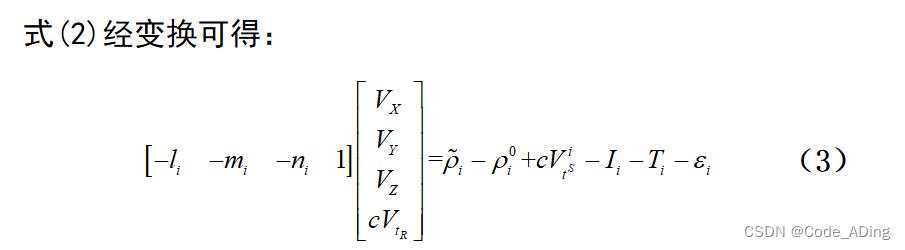
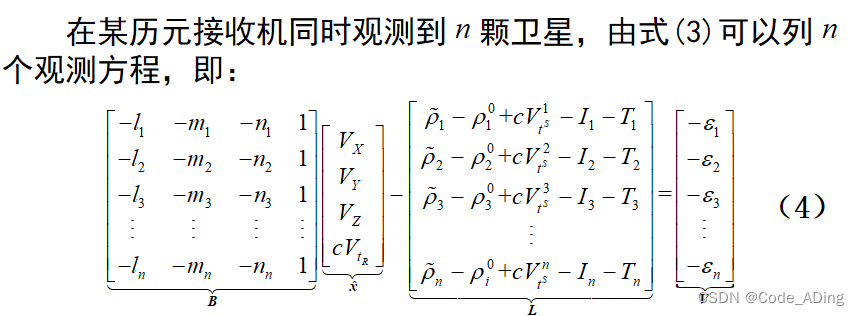
3.在某历元接收机同时观测n颗卫星,列出观测方程
四、最小二乘迭代计算
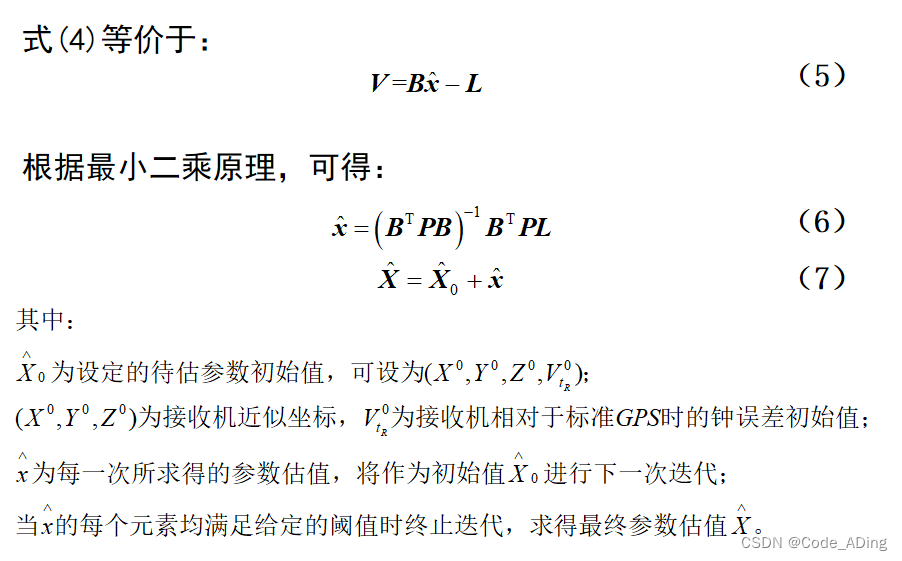
1.最小二乘解的计算
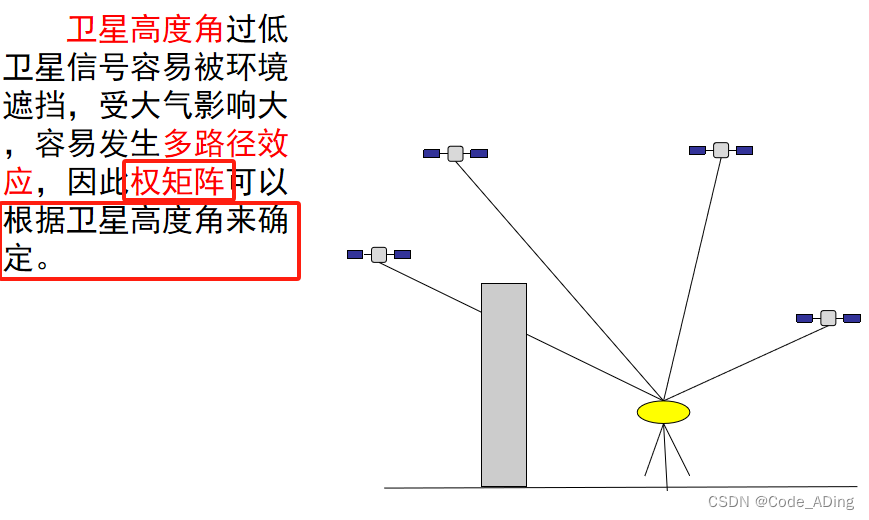
2.根据卫星高度角定权确定权矩阵P
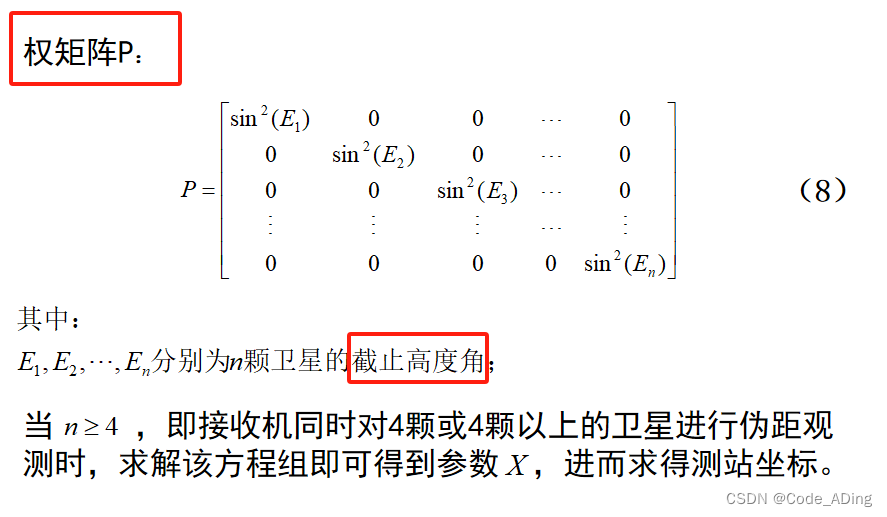
五、算例分析
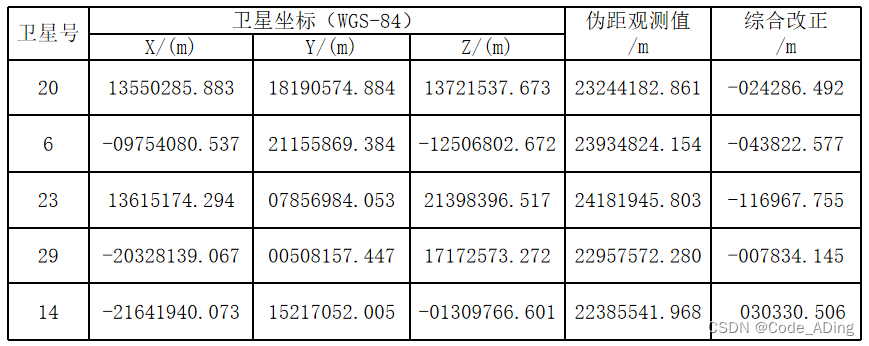
假设在某历元使用一台GPS接收机同时观测 5 颗卫星,卫星的瞬时空间直角坐标如下表所示,接收机天线概略坐标为 (-2441267.856, 4790213.953, 3419994.410) ,其中综合改正包括卫星钟差、对流层延迟误差、电离层延迟误差等。
1.以20号卫星为例,在接收机概略位置处卫星到接收机距离为:

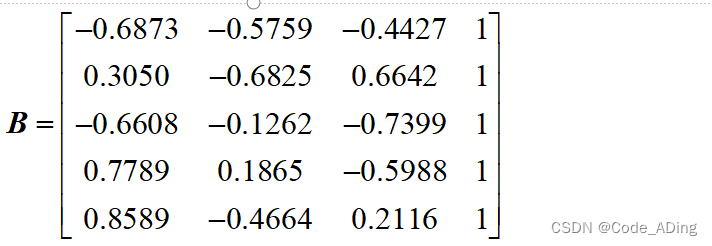
2.其观测向量方向余弦为:
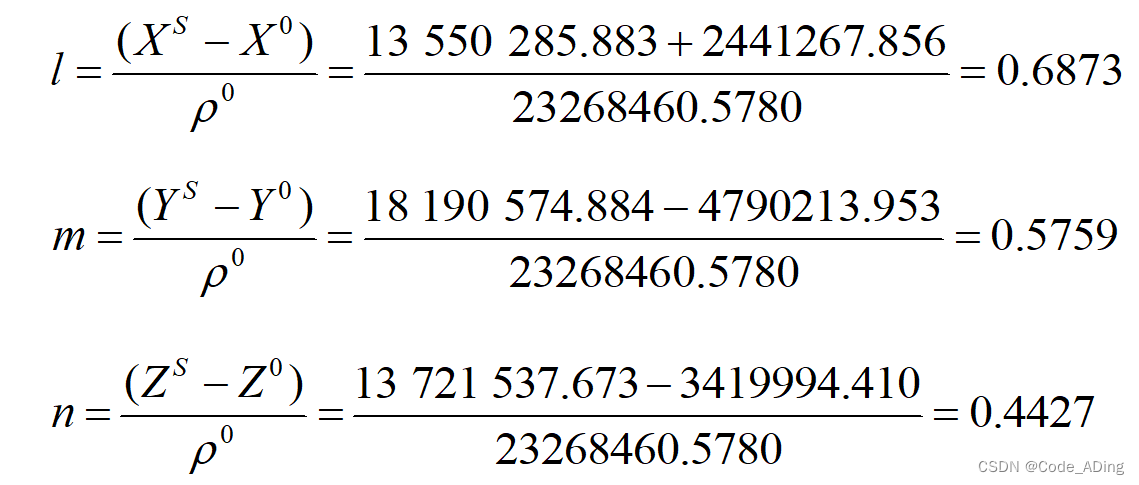
同理,分别对其他卫星进行计算可得观测向量方向余弦矩阵:
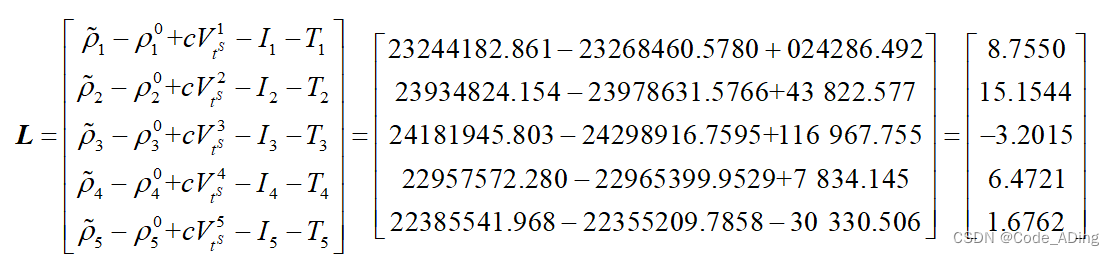
3.观测向量为:
L为常数项、自由项,计算方法:伪距观测值 - 接收机与卫星之间的概略距离 - 综合误差改正
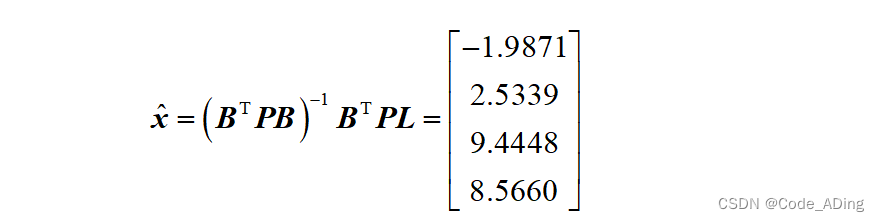
4.由原理中的公式求解接收机位置的变化值与接收机钟差值
其中,接收机钟差初始值未知,设为零。
5.得到接收机坐标平差值

6.设置迭代阈值,迭代计算
设迭代阈值设为 ,第二次迭代结果为:
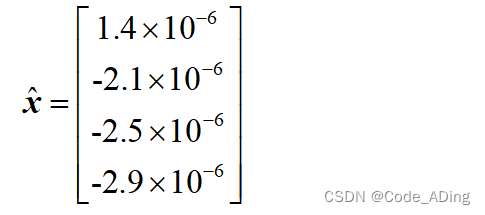
迭代终止,接收机坐标平差值与上一次计算值相等(小于迭代阈值),计算结束。
这篇关于伪距单点定位概念与原理、算例分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





