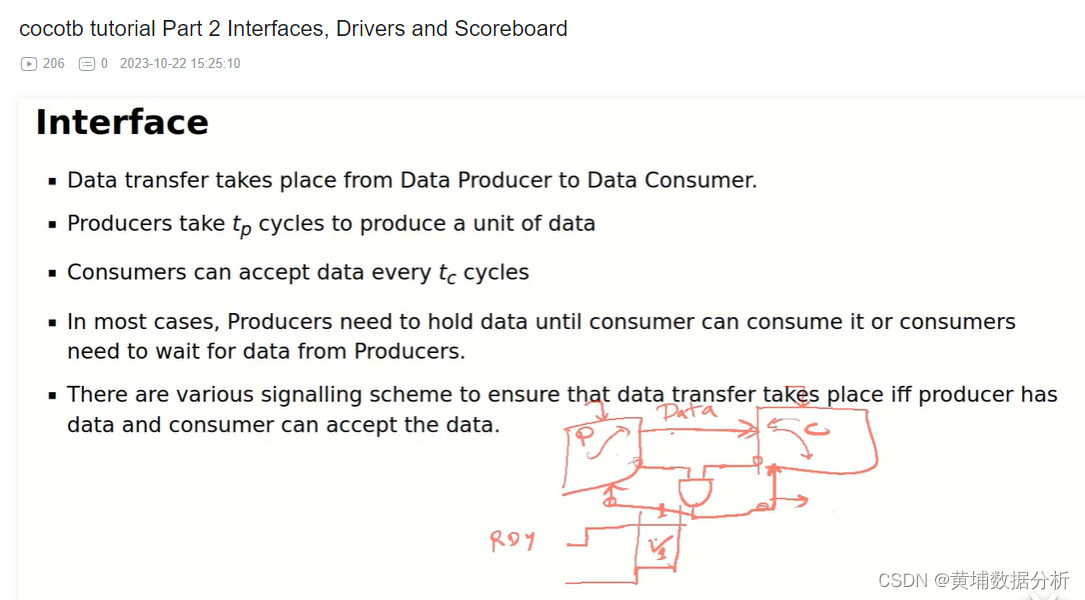
本文主要是介绍【cocotb2】cocotb tutorial Part 2 Interfaces, Drivers and Scoreboard,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
对python要求比较高

这篇关于【cocotb2】cocotb tutorial Part 2 Interfaces, Drivers and Scoreboard的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
本文主要是介绍【cocotb2】cocotb tutorial Part 2 Interfaces, Drivers and Scoreboard,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
对python要求比较高
这篇关于【cocotb2】cocotb tutorial Part 2 Interfaces, Drivers and Scoreboard的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
http://www.chinasem.cn/article/482213。
23002807@qq.com






![[UVM]6.component driver monitor sequencer agent scoreboard env test](https://i-blog.csdnimg.cn/direct/d6155f8e9cb5494582087a4fa47916e2.png)


