本文主要是介绍microblaze仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
verdi+vcs
(1) vlogan/vcs增加编译选项 -debug_access+all -kdb -lca
(2) 在 simulation 选项中加入下面三个选项
-gui=verdi
+UVM_VERDI_TRACE="UVM_AWARE+RAL+HIER+COMPWAVE"
+UVM_TR_RECORD
这里 -gui=verdi是启动verdi 和vcs联合仿真。+UVM_VERDI_TRACE 这里是记录 UVM中 register,component 的波形。+UVM_TR_RECORD记录 transaction的信息。
用verdi调试时虽然可以单步执行,但是task中的局部变量一般都不可读取,造成调试困难。
“Undefined System Task call to '$fsdbDumpfile'”
需要包含verdi的路径:module load verdi
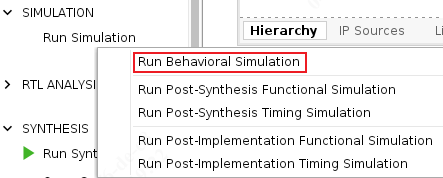
直接点击Run Behavioral Simulation,会编译报错提示文件重复包含,需要对模块重命名,
可是该package文件已经使用·define命令进行单次包含了,为什么还会提示重复冲突呢?
怀疑可能使用的vcs版本有bug,换了一个更高版本的vcs结果是一样的。
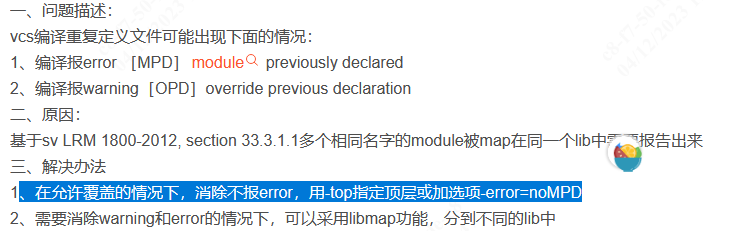
最后多次尝试发现,是由于vivado生产的编译脚本是分段编译的,也就是说这个重复冲突的文件在多个vlogan命令里被独立包含了,而又都编译到了同一个lib库中,于是手动修改compile.sh文件,将文件合并编译后该问题解决。
hvp/xlm文件打开
使用verdi -cov
参考:
如何用Verdi查看UVM环境中的变量?_verdi_仿真_debug
Verdi UVM Debug Mode 简单使用-CSDN博客
Synopsys VCS 编译时,启用debug选项-CSDN博客
vcs编译重复定义文件问题_module previously declared-CSDN博客
VCS编译命令 - 知乎
这篇关于microblaze仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








