本文主要是介绍根轨迹和频率响应,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
首先我们来了解一下根的定义,在一个闭环一阶系统中,存在过度函数G(s)为s的一个式子,那么它可能会存在零点和极点,说到极点想必大家都非常熟悉了,在此,我们可以理解为“根”=“极点”。那么什么是根轨迹呢,我们给出这样的定义,当一个参数从0增加到正无穷时,根运动的轨迹,就称为根轨迹。在此我们就不过多赘述它的画法了,使用matlab可以很轻易的画出根轨迹,如图所示
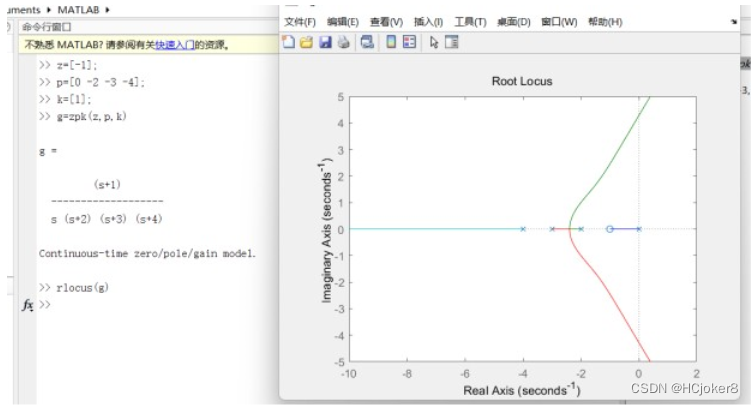
我们主要说一下根轨迹的重要性:
1.如果根轨迹全部位于s平面左侧,就表示无论增益怎么改变,特征根全部具有负实部,则系统就是稳定的。
2.如果根轨迹在虚轴上,表示临界稳定,也就是不断振荡。
3.如果根轨迹根轨迹全部都在s右半平面,则表示无论选择什么参数,系统都是不稳定的。
也就是说增益在一定范围内变化时,系统可以保持稳定,但是当增益的变化超过这一阈值时,系统就会变得不稳定,而这一阈值就是出现在根轨迹与虚轴的交点上,在这一点系统临界稳定。最终可由增益的取值范围判断系统的稳定性。
根轨迹的画法呢我简单提一下,根轨迹是有开环极点指向开环零点,从左向右,两两对应,如果缺少对应的,则以无穷极点/零点代替(举个例子,假如只有一个极点,没有零点,那么根轨迹就是由这个极点指向负无穷),另外,根轨迹是对称于实轴的,其汇合点和分离点并非重点,感兴趣的同学可以自己搜索一下了解一下。
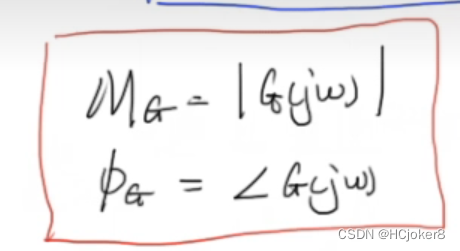
接下来我们说一下频率响应,还是先从一阶系统开始说起,对于一个线性时不变系统来说,过度函数为G(s),如果我们给它一个正弦函数的输入,那么在经过这个系统之后,它的振幅和相位都会发生变化,具体推导我在此不叙述,它的结果呢,就如图所示,如果对其推导过程感兴趣,请
点击此处
对于频率响应来说,我们还是以一阶系统为例,修改其控制器可以实现高频滤波器和低频滤波器,对于低频滤波器来说,其特点在于“容器”,那么当输入端发生改变时,如下左图讲水龙头开关开关,对于其输出来说影响不大,原因就在于它有缓冲的“容器”,下右图的电容也是同理。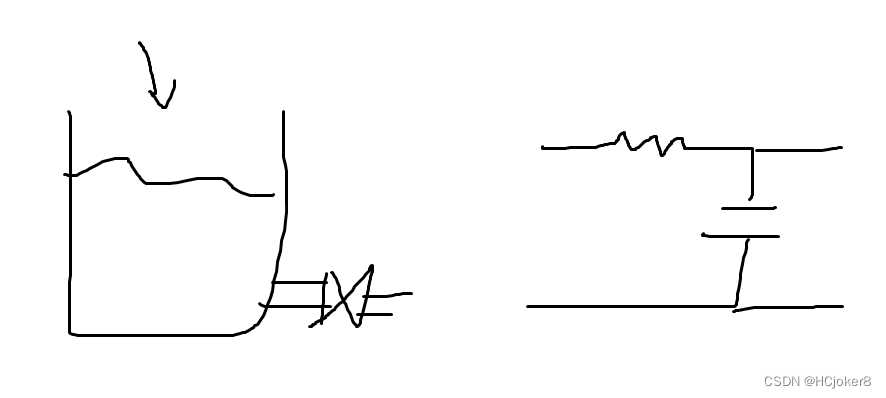
二阶频率响应和一阶频率响应差不多,无非就是多了个固有频率,大家只需要知道不同的二阶系统其固有频率是不同的即可。
更多内容可以参考b站的视频。
这篇关于根轨迹和频率响应的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!