本文主要是介绍DAIR-V2X点云可视化以及添加3D框,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 单个点云可视化
1.1 代码
import open3d as o3d
import numpy as np#读取数据
pcd = o3d.io.read_point_cloud("pcd\\000009.pcd")
print(pcd)vis = o3d.visualization.Visualizer()
vis.create_window()#点云渲染
opt = vis.get_render_option()
opt.point_size = 1 #点云大小
opt.background_color = np.asarray([0, 0, 0]) #点云背景色vis.add_geometry(pcd)
vis.run()
vis.destroy_window()
1.2 运行效果
2 多个点云可视化
2.1 代码
import open3d as o3d
import numpy as np#读取数据
pcd1 = o3d.io.read_point_cloud("peizhun\\001079.pcd")
print(pcd1)#读取数据
pcd2 = o3d.io.read_point_cloud("peizhun\\004994.pcd")
print(pcd2)vis = o3d.visualization.Visualizer()
vis.create_window()#点云渲染
opt = vis.get_render_option()
opt.point_size = 1 #点云大小
opt.background_color = np.asarray([0, 0, 0]) #点云背景色vis.add_geometry(pcd1)
vis.add_geometry(pcd2)
vis.run()
vis.destroy_window()
2.2 运行效果
3 获取单个3D框
#box_dir 为json文件对应的路径
def get_box(box_dir):with open(box_dir, 'r') as f:data = json.load(f)for dict in data:#读取x,y,zx=dict.get('3d_location').get('x')y=dict.get('3d_location').get('y')z=dict.get('3d_location').get('z')#读取h,w,lh=dict.get('3d_dimensions').get('h')w=dict.get('3d_dimensions').get('w')l=dict.get('3d_dimensions').get('l')#8个定点信息point1=point2=point3=point4=point5=point6=point7=point8=[0,0,0]point1=[x+0.5*w,y-0.5*l,z-0.5*h] point2=[x+0.5*w,y+0.5*l,z-0.5*h] point3=[x-0.5*w,y+0.5*l,z-0.5*h] point4=[x-0.5*w,y-0.5*l,z-0.5*h] point5=[x+0.5*w,y-0.5*l,z+0.5*h] point6=[x+0.5*w,y+0.5*l,z+0.5*h] point7=[x-0.5*w,y+0.5*l,z+0.5*h] point8=[x-0.5*w,y-0.5*l,z+0.5*h] #3d boxbox=[point1,point2,point3,point4,point5,point6,point7,point8] return box
4 获取多个3D框
def get_box(box_dir):box = [0] * countyaw = [0] * countwith open(box_dir, 'r') as f:data = json.load(f)i = 0for dict in data:#读取x,y,zx=dict.get('3d_location').get('x')# x=round(x,3)y=dict.get('3d_location').get('y')z=dict.get('3d_location').get('z')#读取h,w,lh=dict.get('3d_dimensions').get('h')w=dict.get('3d_dimensions').get('w')l=dict.get('3d_dimensions').get('l')#读取rotationyaw[i] = dict.get('rotation')#8个定点信息point1=point2=point3=point4=point5=point6=point7=point8=[0,0,0]point1=[x+0.5*w,y-0.5*l,z-0.5*h] point2=[x+0.5*w,y+0.5*l,z-0.5*h] point3=[x-0.5*w,y+0.5*l,z-0.5*h] point4=[x-0.5*w,y-0.5*l,z-0.5*h] point5=[x+0.5*w,y-0.5*l,z+0.5*h] point6=[x+0.5*w,y+0.5*l,z+0.5*h] point7=[x-0.5*w,y+0.5*l,z+0.5*h] point8=[x-0.5*w,y-0.5*l,z+0.5*h] #3d boxbox[i]=[point1,point2,point3,point4,point5,point6,point7,point8]i += 1 return box
5 DAIR-V2X 3D框投影到点云
注:因为json文件中含有rotation变量,所以对矩阵做了旋转
import json
from tkinter import W
from matplotlib.pyplot import box
import open3d as o3d
import numpy as np
import math
import json def get_box_count(box_dir):with open(box_dir, 'r') as f:data = json.load(f)i = 0for dict in data:i += 1return idef get_lidar_3d_8points(obj_size, yaw_lidar, center_lidar):center_lidar = [center_lidar[0], center_lidar[1], center_lidar[2]]#x,y,zlidar_r = np.matrix([[math.cos(yaw_lidar), -math.sin(yaw_lidar), 0], [math.sin(yaw_lidar), math.cos(yaw_lidar), 0], [0, 0, 1]])l, w, h = obj_sizecenter_lidar[2] = center_lidar[2] - h / 2corners_3d_lidar = np.matrix([[l / 2, l / 2, -l / 2, -l / 2, l / 2, l / 2, -l / 2, -l / 2],[w / 2, -w / 2, -w / 2, w / 2, w / 2, -w / 2, -w / 2, w / 2],[0, 0, 0, 0, h, h, h, h],])corners_3d_lidar = lidar_r * corners_3d_lidar + np.matrix(center_lidar).Treturn corners_3d_lidar.Tdef read_label_bboxes(label_path):with open(label_path, "r") as load_f:labels = json.load(load_f)i = 0boxes = [0] * countfor label in labels:obj_size = [float(label["3d_dimensions"]["l"]),float(label["3d_dimensions"]["w"]),float(label["3d_dimensions"]["h"]),]yaw_lidar = float(label["rotation"])center_lidar = [float(label["3d_location"]["x"]),float(label["3d_location"]["y"]),float(label["3d_location"]["z"]),]box = get_lidar_3d_8points(obj_size, yaw_lidar, center_lidar)boxes[i] = np.matrix.tolist(box) i += 1return boxes#绘制点云与3d box
def draw_pcd_box(pcd,linesets):vis = o3d.visualization.Visualizer()vis.create_window()vis.add_geometry(pcd)for i in range(count): vis.add_geometry(linesets[i])#点云渲染opt = vis.get_render_option()opt.point_size = 1 #点云大小opt.background_color = np.asarray([0, 0, 0]) #点云背景色vis.run()vis.destroy_window() if __name__=='__main__':#读取3d box数据box_dir = "json\\000009.json"count = get_box_count(box_dir)#获取3d框数量_3dbox = read_label_bboxes(box_dir)#读取点云数据pcd_dir = "pcd\\000009.pcd"pcd = o3d.io.read_point_cloud(pcd_dir)lines_box = np.array([[0, 1], [1, 2], [0, 3], [2, 3], [4, 5], [4, 7], [5, 6], [6, 7],[0, 4], [1, 5], [2, 6], [3, 7]])colors = np.array([[0, 1, 0] for j in range(len(lines_box))])line_set = [0] * countfor i in range(count):line_set[i] = o3d.geometry.LineSet()line_set[i].points = o3d.utility.Vector3dVector(_3dbox[i])line_set[i].lines = o3d.utility.Vector2iVector(lines_box)line_set[i].colors = o3d.utility.Vector3dVector(colors)# point_cloud = o3d.geometry.PointCloud()# point_cloud.points = o3d.utility.Vector3dVector(pcd[:,:3])draw_pcd_box(pcd,line_set)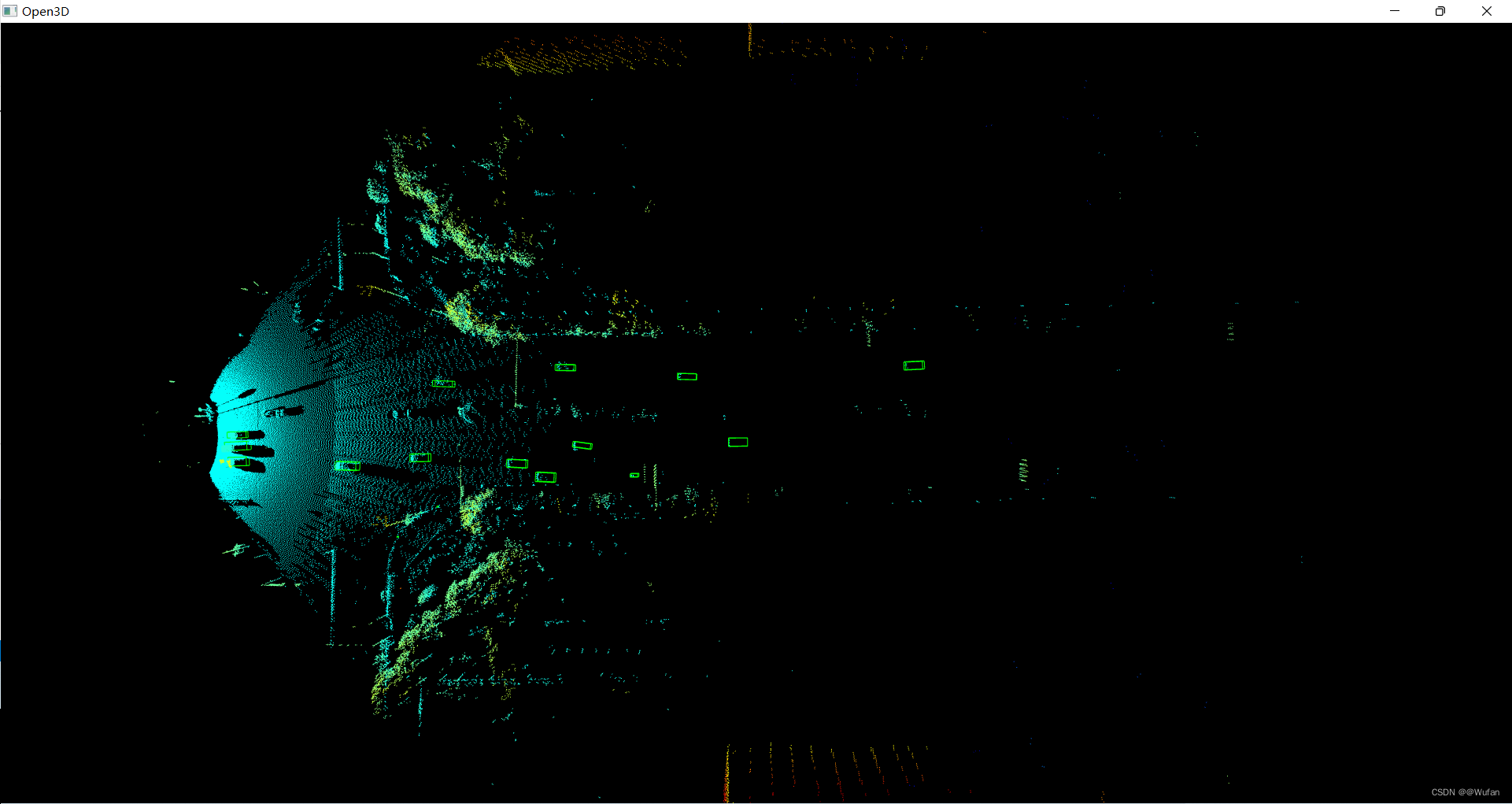
这篇关于DAIR-V2X点云可视化以及添加3D框的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






