本文主要是介绍matlab免疫算法实现路径规划避开障碍物,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、内容简介
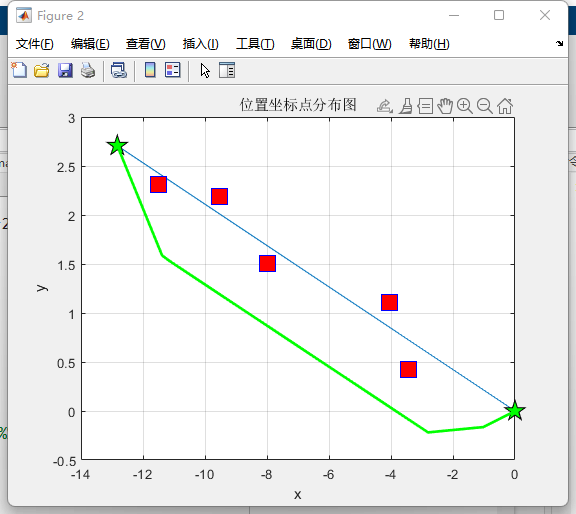
免疫算法实现路径规划避开障碍物
650-可以交流、咨询、答疑
2、内容说明
免疫算法的思想来自模拟人体的免疫系统。免疫系统是人体抵抗细菌、病毒和其它致病因子入侵的基本防御系统。免疫系统通过一套复杂的机制来重组基因,以产生抗体对付入侵的抗原,达到消灭抗原的目的。为了有效地提供防御功能,免疫系统必须进行模式识别,把自身的分子和细胞与抗原区分开来。除了具有识别能力之外,免疫系统与其它低级生物防御系统的区别在于它能够学习,并且有记忆能力。正是因为拥有上述特点,免疫系统对同一抗原的防御反应,第二次比第一次来得更快、更强烈。免疫算法模仿了人体的免疫系统,并从体细胞理论和网络理论中得到启发,实现了类似于免疫系统的自我调节功能和生抗体的功能。
3、仿真分析
clc
close all
clear
rng defaultobstacle_x = [-3.448,-4.05, -8,-9.531,-11.5];
% obstacle_y = [0.728,1.11, 1.678,2.184,2.31];
obstacle_y = [0.428,1.11, 1.508,2.184,2.31];
obstacle = [obstacle_x obstacle_y];
target_x = [0 -12.829]; % 两个目标站点的横坐标
target_y = [0 2.707]; % 两个目标站点的纵坐标
target = [target_x target_y];
% dist = distance(point, target, obstacle)
% 目标函数 point为优化的点坐标,target为两个站台位置,obstacle为障碍物固定的位置
point = length(obstacle_x)+1;D=point*2; %免疫个体维数
NP=300; %免疫个体数目
Xs=3; %取值上限
Xx=-13; %取值下限
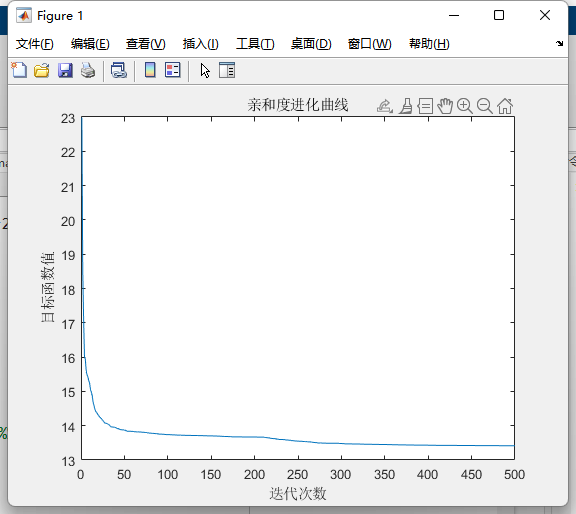
G=500; %最大免疫代数
pm=0.5; %变异概率
alfa=2; %激励度系数
belta=1; %激励度系数
detas=0.5; %相似度阈值
gen=0; %免疫代数
Ncl=20; %克隆个数
deta0=-5.5; %邻域范围初值%%%%%%%%%%%%%%%%%%%%%%%初始种群%%%%%%%%%%%%%%%%%%%%%%%%
% f1=rand(D/2,NP)*(Xs-Xx)+Xx;
% Xs = 3;
% Xx = 0;
% f2=rand(D/2,NP)*(Xs-Xx)+Xx;
% f = [f1;f2];f=rand(D,NP)*(Xs-Xx)+Xx;
for np=1:NPMSLL(np) = distance(f(:,np), target, obstacle);
end
%%%%%%%%%%%%%%%%%计算个体浓度和激励度%%%%%%%%%%%%%%%%%%%
for np=1:NPfor j=1:NP nd(j) = sum(sqrt((f(:,np)-f(:,j)).^2));if nd(j)<detasnd(j)=1;elsend(j)=0;endendND(np)=sum(nd)/NP;
end
MSLL = alfa*MSLL - belta*ND;4、参考论文
略
这篇关于matlab免疫算法实现路径规划避开障碍物的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




