本文主要是介绍qt-C++笔记之主线程中使用异步逻辑来处理ROS事件循环和Qt事件循环解决相互阻塞的问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
qt-C++笔记之主线程中使用异步逻辑来处理ROS事件循环和Qt事件循环解决相互阻塞的问题
code review!
文章目录
- qt-C++笔记之主线程中使用异步逻辑来处理ROS事件循环和Qt事件循环解决相互阻塞的问题
- 1.Qt的app.exec()详解
- 2.ros::spin()详解
- 3.ros::AsyncSpinner详解
- 4.主线程中结合使用的示例
1.Qt的app.exec()详解
app.exec()是Qt应用程序的主事件循环函数。它是一个阻塞函数,负责处理所有的事件和信号,并保持应用程序处于运行状态,直到退出条件满足为止。
当调用app.exec()时,Qt会开始处理事件循环,并等待事件的触发。事件可以是来自用户的输入(例如鼠标点击、键盘按键)或其他系统事件(例如定时器事件、网络事件)。Qt会不断地从事件队列中获取事件并相应地触发对应的槽函数或事件处理函数。
在事件循环期间,Qt应用程序会保持响应,并能够实时更新UI界面。所有的UI操作和更新都应该在主线程中进行,以确保线程安全性。
只有当退出条件满足时,app.exec()才会返回并结束应用程序的运行。在大多数情况下,退出条件是用户显式关闭应用程序的主窗口或调用QCoreApplication::quit()函数来请求退出。
需要注意的是,app.exec()是一个阻塞函数,它会一直运行直到应用程序退出。因此,一般情况下,应该将需要在app.exec()之后执行的代码放置在适当的位置,或者使用信号与槽机制来处理退出时的清理操作。
总结起来,app.exec()是Qt应用程序的主事件循环函数,负责处理事件并保持应用程序处于运行状态,直到退出条件满足。它是编写基于Qt的GUI应用程序的关键部分。
2.ros::spin()详解
ros::spin()是ROS提供的一个阻塞函数,用于启动ROS节点的事件循环并等待节点退出的信号。它会一直运行,直到接收到终止信号或调用ros::shutdown()函数来请求节点退出。
当调用ros::spin()时,ROS节点会开始处理订阅者的消息、服务的请求和其他事件。它会阻塞当前线程,持续处理事件,直到满足退出条件。
ros::spin()的主要作用是保持ROS节点处于运行状态,确保节点能够处理到来的消息和事件。它会等待消息的到达并调用对应的回调函数进行处理。如果没有消息到达,ros::spin()会继续等待,而不会占用过多的CPU资源。
以下是使用ros::spin()的一般流程:
- 在ROS节点初始化完成后,调用
ros::spin()函数。 - ROS节点会开始处理订阅者的消息、服务的请求和其他事件。
- 当有消息到达时,ROS会调用对应的回调函数进行处理。
- 如果没有消息到达,
ros::spin()会继续等待,而不会占用过多的CPU资源。 - 当接收到终止信号或调用
ros::shutdown()函数时,ros::spin()会退出,节点的事件循环结束。
需要注意的是,ros::spin()是一个阻塞函数,它会一直运行直到节点退出。因此,一般情况下,应该将需要在ros::spin()之后执行的代码放置在适当的位置,或者使用信号与槽机制来处理退出时的清理操作。
以下是使用ros::spin()的示例代码片段:
// 初始化ROS节点
ros::init(argc, argv, "my_node");// 创建ROS节点句柄
ros::NodeHandle nh;// 创建ROS订阅者和其他对象
// ...// 启动ROS事件循环并等待节点退出
ros::spin();// 节点退出后的清理操作
// ...
总结起来,ros::spin()是ROS提供的一个阻塞函数,用于启动ROS节点的事件循环并等待节点退出的信号。它保持节点处于运行状态,处理到来的消息和事件,并且不会占用过多的CPU资源。
3.ros::AsyncSpinner详解
ros::AsyncSpinner是ROS提供的一个异步事件处理器,用于在单独的线程中处理ROS的回调函数和事件循环。它允许ROS节点在执行回调函数的同时继续处理其他任务,而不会被阻塞。
当创建一个ros::AsyncSpinner对象并调用其start()函数时,它会启动一个新的线程,并在该线程中执行ROS的事件循环。事件循环负责处理ROS的回调函数,包括订阅者的消息、服务的请求等。
使用ros::AsyncSpinner的好处是,它允许ROS节点在单独的线程中并行处理事件,而不会阻塞主线程。这对于需要同时进行ROS通信和其他任务(例如UI更新、计算等)的应用程序特别有用。
以下是使用ros::AsyncSpinner的一般流程:
- 创建
ros::AsyncSpinner对象,可以设置线程数(默认为1)来指定并行处理的线程数。 - 调用
start()函数启动异步事件循环。 - 在事件循环开始后,ROS节点会开始处理订阅者的消息、服务的请求等。
- 主线程可以继续执行其他任务,例如处理UI更新、计算等。
- 当应用程序退出时,调用
ros::AsyncSpinner的stop()函数来停止异步事件循环。
需要注意的是,使用ros::AsyncSpinner时,确保在主线程中使用ros::NodeHandle对象进行ROS通信,而不是在异步事件循环线程中使用。
以下是使用ros::AsyncSpinner的示例代码片段:
// 创建ROS异步Spinner,指定线程数为1
ros::AsyncSpinner spinner(1);
spinner.start();// 在异步事件循环开始后执行其他任务
// ...// 停止异步事件循环
spinner.stop();
总结起来,ros::AsyncSpinner是ROS提供的一个异步事件处理器,用于在单独的线程中处理ROS的回调函数和事件循环。它允许ROS节点在并行处理事件的同时继续执行其他任务,提高了应用程序的响应性能。
4.主线程中结合使用的示例
ros::AsyncSpinner是ROS提供的一个类,可以在单独的线程中处理ROS的事件循环,而不会阻塞Qt的事件循环。你可以在主函数中创建一个ros::AsyncSpinner对象,并调用其start()函数来启动ROS事件循环。这样,ROS会在独立线程中处理事件,而主线程可以继续执行Qt的事件循环。
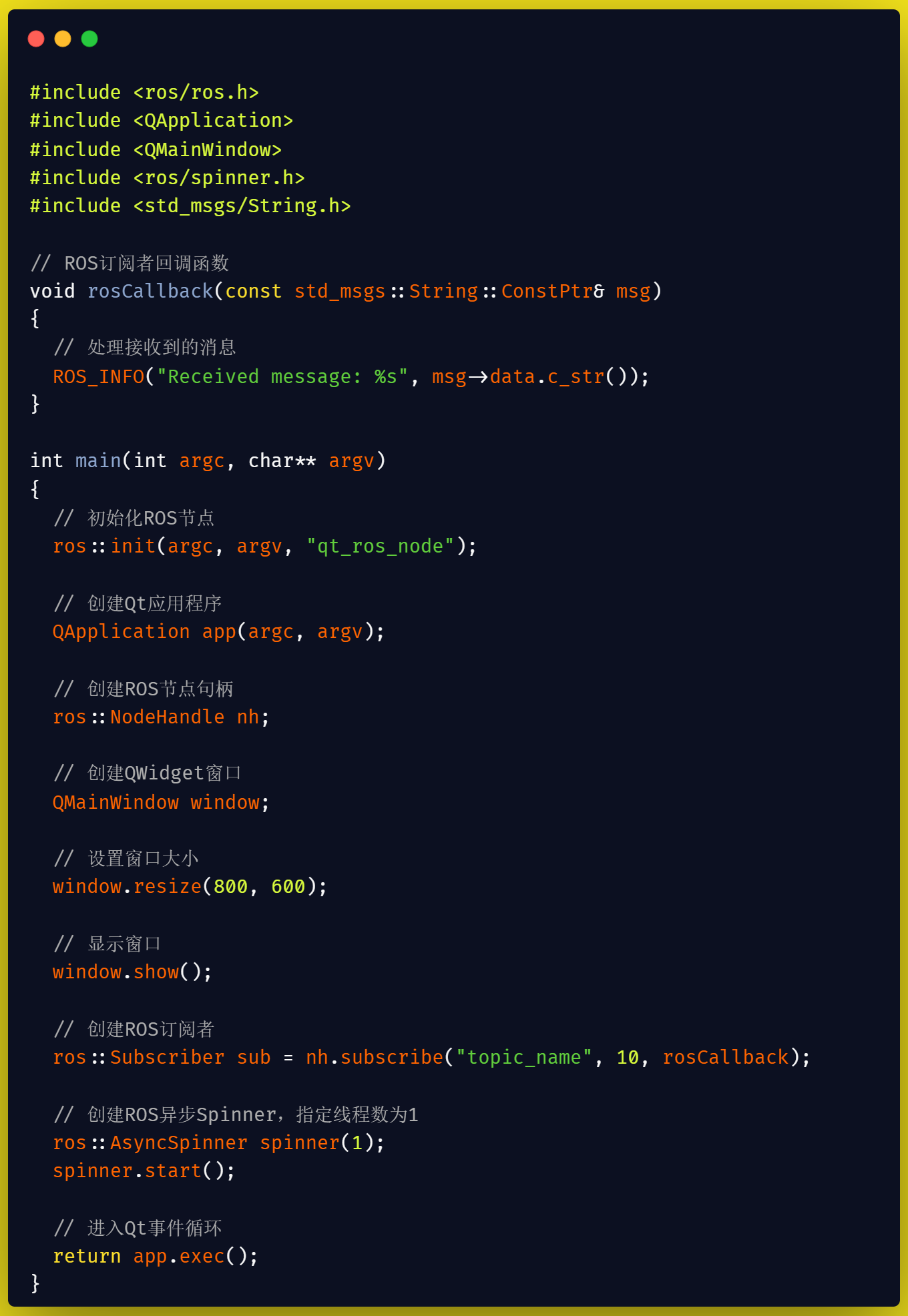
在这个示例中,我们在主函数中创建了一个ros::AsyncSpinner对象spinner,并将线程数设置为1。然后,通过调用spinner.start()启动ROS事件循环。这样,ROS会在独立线程中处理事件,而主线程可以继续执行Qt的事件循环。
代码
#include <ros/ros.h>
#include <QApplication>
#include <QMainWindow>
#include <ros/spinner.h>
#include <std_msgs/String.h>// ROS订阅者回调函数
void rosCallback(const std_msgs::String::ConstPtr& msg)
{// 处理接收到的消息ROS_INFO("Received message: %s", msg->data.c_str());
}int main(int argc, char** argv)
{// 初始化ROS节点ros::init(argc, argv, "qt_ros_node");// 创建Qt应用程序QApplication app(argc, argv);// 创建ROS节点句柄ros::NodeHandle nh;// 创建QWidget窗口QMainWindow window;// 设置窗口大小window.resize(800, 600);// 显示窗口window.show();// 创建ROS订阅者ros::Subscriber sub = nh.subscribe("topic_name", 10, rosCallback);// 创建ROS异步Spinner,指定线程数为1ros::AsyncSpinner spinner(1);spinner.start();// 进入Qt事件循环return app.exec();
}
这篇关于qt-C++笔记之主线程中使用异步逻辑来处理ROS事件循环和Qt事件循环解决相互阻塞的问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







