本文主要是介绍对话特斯拉北美车主:FSD什么水平?深度用户解密V11,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
作者 |Amy
编辑 |德新

近期中国四部委联合印发通知,部署开展智能网联汽车准入和上路通行试点工作,要求具备量产条件L3、L4 级别智能网联车在限定区域内开展上路试点,并且首次明确事故责任判定。
通知下发后,市场传闻:特斯拉FSD进入国内有望进入倒计时。
11月23日,特斯拉中国回应媒体称,「目前确实正在推进中。」马斯克则证实,已开始向员工推送最新版本的FSD V12。
在过去很长一段时间,中国的特斯拉车主们时常抱怨FSD只是期货。在FSD未正式进入中国的这些年,其在全球市场的重大更新,总能引发国内行业人士与车主激烈的讨论。
特别是特斯拉决定去掉毫米波雷达,选择视觉路线后,是否需要激光雷达,以及「有图、无图」路线之争始终未能平息。
因此,HiEV采访了数位FSD海外用户,其中不乏资深智驾工程师,专业车评人和华尔街投资人,跟他们聊了聊FSD的技术演进和真实的用户体验。
一、V11版本:Occupancy占用网络上车,空间感知能力大增
Simon是一位智驾领域的资深从业者。他在去年初提车Model Y之后,按月付费开通了FSD。
作为FSD Beta V10开始的早期用户兼专业从业者,Simon对FSD的多个版本有着持续细腻的观察。
Simon注意到,今年年初,FSD Beta V11.3版本进行了架构上的调整:
- 利用统一的BEV感知算法,替代依赖多个单摄像头和单帧网络的软件堆栈;
- FSD与Autopilot的软件栈合并,使用同一个软件栈统一高速与城区场景,从而减少了高速衔接区域软件栈切换导致的一些接管问题;
- 增加了Occupancy占用格栅网络;
V13.1.1的版本说明显示,统一后,该版本使用的多摄像头融合感知算法和规划算法,降低了对车道线的依赖。
感知方面,通过使用权重更高、更稳健的离线优化算法改进数据集,并优化架构和特征空间降低候选轨迹神经网络目标姿态预测误差;引入远程高速公路车道网络,采样特殊场景视频,改进占用网络检测等功能。
规划上,添加自动标记的变道案例,改进运动建模,在线路网络中增加了“车道引导模块和感知损失功能”,更新“车道引导”模块,提升操控性等性能。
Simon认为,这个版本是针对高速和城区技术栈的整合,以及无图感知能力的提升,是体验改善的主要原因。
虽然FSD做全局规划时,参考了Google Map输入的地图信息,但在局部规划时,因为Google Map的鲜度和精细程度不够,系统会利用地图先验知识和感知能力对路径进行更精细的规划,从而实现局部体验的提升。
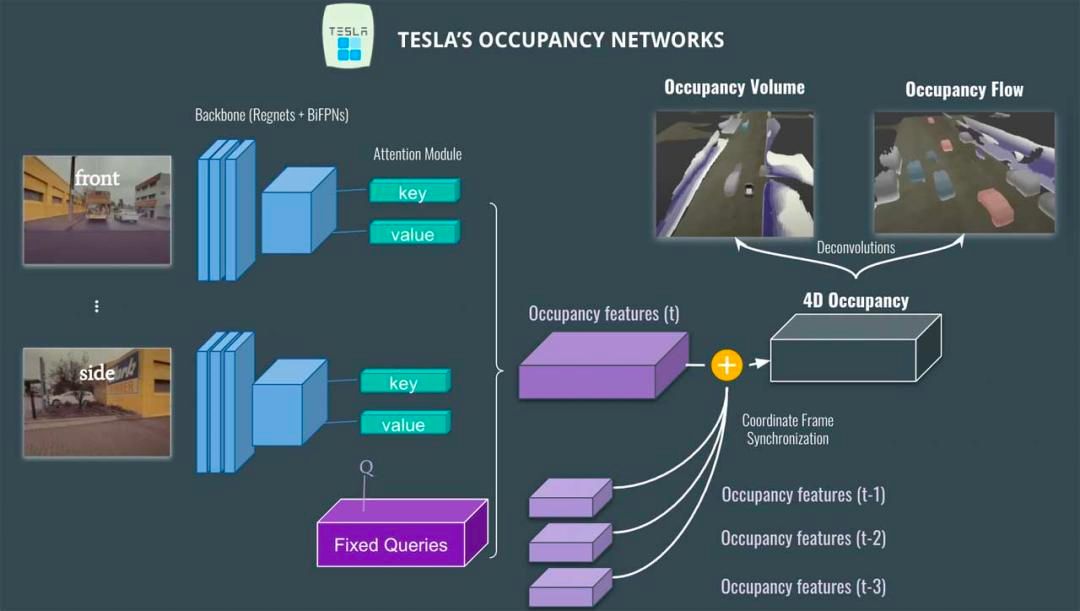
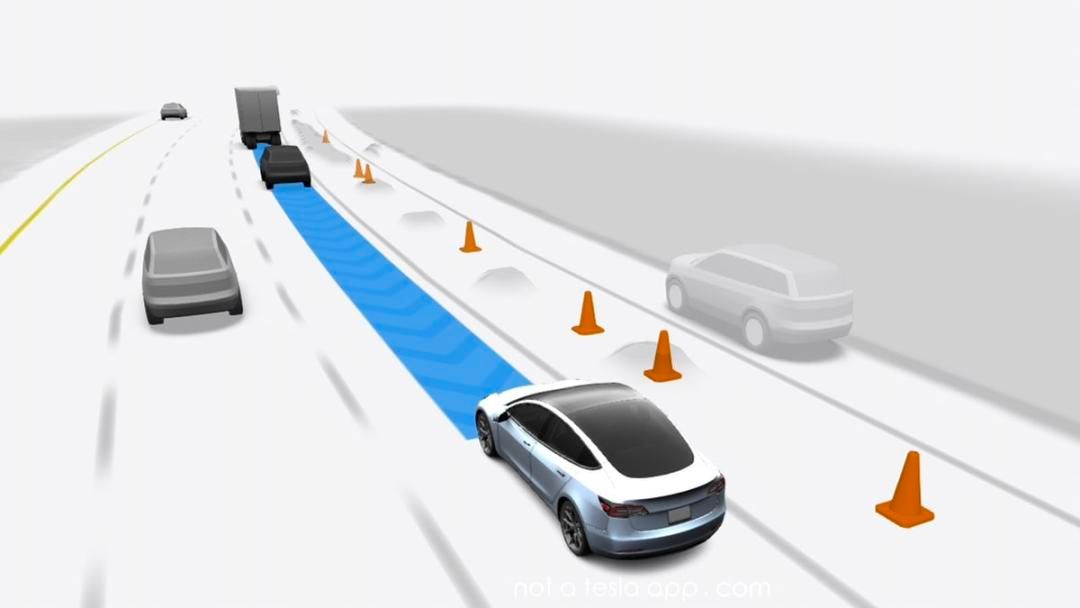
在引入Occupancy占用格栅网络后,FSD系统对异形物体和空间的感知能力,大幅度提升。
作为一个乘坐过Waymo、Cruise等Robotaxi车型的从业者,对比体验之下,Simon认为,目前特斯拉用把这套硬件的潜力极大地发挥出来了,但仍然有部分长尾问题有待解决,尤其在城区场景。
二、大部分高速体验不俗,部分特殊场景仍待优化
同为智驾行业公司从业者的Yasser,在一家L4领域的公司工作。
他的使用场景与Simon类似,都是在旧金山湾区,两位每天通勤里程都在一百英里(约161公里)左右。
他们对FSD的评价出奇一致:
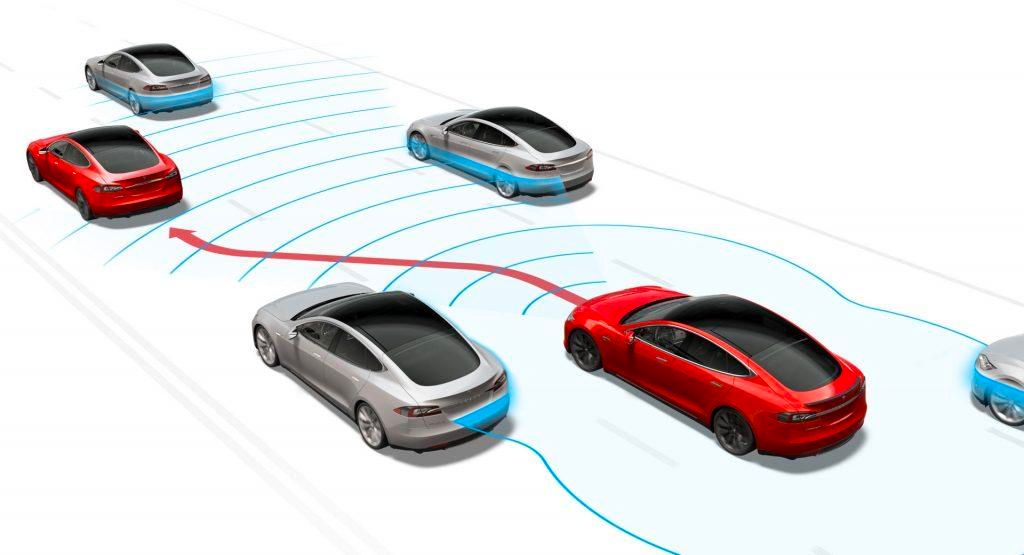
在高速路段和快速路上,FSD车技堪比人类司机,能够熟练地进行变道并规避过往的货车。每一次通勤,高速接管的频率基本保持在5次以内。
在美用户Li也反馈,用FSD进行远途旅行时,体验比较丝滑,对于接管频率也可以接受。
多位在美FSD用户反馈高速场景下特斯拉FSD的自动巡航、自动变道、自动超车等功能表现较佳。因在美通勤路段90%以高速为主,因此这也代表了FSD整体的体验感知。
不过在高速场景西FSD仍存在部分细微问题,或与算法成熟度及个人驾驶习惯相关。
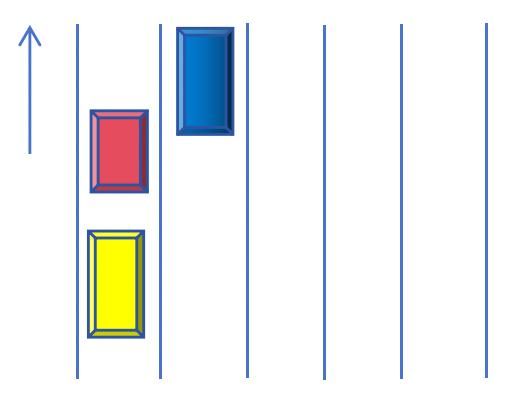
Roxann Higuera女士年过六十,但仍乐意尝鲜。她在社交平台记录下的经历证明,FSD在高速遇到一些特殊场景的情况。
当时她(红车)开启了FSD行驶在高速五车道中最左侧车道,右方突然出现一辆货车(蓝车),FSD选择减速,Roxann踩油门加速超车失败后,后方又出现了一辆皮卡(黄车)。
但她无法变道到右侧给后车让道,等她有机会超越货车后,皮卡还是越过她并别了一下车 ,险些酿成追尾。
这种因减速引起的麻烦并非孤例,社交平台上其他FSD用户也反馈曾遇到过类似场景。
例如,在山区行驶时,系统有时会误将山体误判为车辆,导致不必要的减速。
在经历这次事件后,上文提及的Roxann女士进行了一系列保守设置,关闭了FSD自启用功能、关闭了基于速度的超车变道功能等。
此外,Roxann还指出,在山路行驶时,FSD难以确保车辆居中行驶,而且在没有路肩的道路上行驶时,给来向车辆预留了过多空间。
三、城区场景存长尾问题,幽灵刹车偶发
互联网产品经理Musabbir H. Khan在升级了FSD Beta V11.3.6 后,也反馈了一些小问题:
- 在FSD启动时,雨刷仍可能自启动,此前多车主曾反馈,但该版本仍未解决;、
- FSD在下匝道和变道时的激进表现引起关注,车主建议提前预判和平滑BI变换,以改善体验;
- 自动跟车距离调整过于激进,尤其在速度提升时。
对于第二个问题,体验过FSD Beta 11.4.7.2的Jason也深表认同,经过深度试驾,他注意到了该版本在城区场景也有诸多问题:
- 车轮偏向问题:在红绿灯等待时,如果两侧车道都有车辆,用户发现车、辆的车轮可能会向一侧偏移。这可能导致一些不必要的不适和不稳定感。
- 右转迟疑:在右转道路的红绿灯路口,FSD存在一些迟疑,尤其是在完成右转并驶入主路后,FSD的反应速度相对较慢。
- 停车标志处理过于保守:FSD在处理停车标志时的判断策略显得过于保守,即使前方没有其他车辆,FSD也可能会停留的时间较长。这可能影响了行车效率,尤其是在空旷的地方。
- 城区切换到办公区判断失误:当从城区左转开进办公区时,用户经历了FSD突然停车不拐弯的情况,可能导致紧急接管,特别是在存在其他车辆的情况下。
- 幽灵刹车现象:偶尔遇到幽灵刹车的情况,例如在从城区道路转入有办公楼的内部道路时,FSD莫名其妙地急刹。
综合而言,这些建议和问题反映了FSD在城区场景下的不足,Simon等人的感受都是,高速路段目前可以轻松交给系统,但到了城区整个驾驶状态会变得紧绷和小心翼翼。
四、FSD价格成推广阻力,入华恐水土不服
特斯拉2022年四季度财报显示,FSD Beta在北美拥有约40万用户。
Simon等人根据对周围用户的观察:目前FSD的用户群,偏向对智驾比较关注的行业内人士和科技达人,也包括特斯拉和马斯克的崇拜者。
Yasser认为之所以FSD未大面积推广,是因为目前FSD在北美售价虽然降至1.2万美元(约合人民币8.6万元),且每月订阅费用保持在199美元(约合人民币1300元)。
对于普通人来说,还是相当昂贵。
而在中国市场,特斯拉增强版自动辅助驾驶功能定价高达3.2万,未落地的FSD则定价6.4万。
与之对比,它的中国竞争对手们:
- 小鹏XNGP和车型绑定,免费提供给用户;
- 华为ADS售价在1.8万左右;
- 蔚来则对部分车型用户免费开放NOP+,订购费用为380元/月。
因此,FSD如果想快速占领市场,目前的定价策略缺少优势。
多名人士表示,FSD入华只是时间早晚问题。
在Simon看来,入华并不存在太大技术难题,核心是解决数据安全问题。
今年8月14日,特斯拉官博称,已在中国建立数据中心,以实现数据存储的本地化。所有在中国大陆市场销售车辆所产生的数据,都会存储在中国境内。
Jason则觉得,FSD入华最大难题在于中国相较于北美更为拥挤且复杂的道路环境,尤其是早晚高峰高速路段往往超级拥挤,FSD想要适应并不容易。
不过近期《关于开展智能网联汽车准入和上路通行试点工作的通知》发布后,为特斯拉FSD技术的推广和应用提供了政策保障。
特斯拉有望进一步加大对FSD技术的在中国的研发和推广力度,也有助于提升自身在全球市场上的影响力,为驾驶者带来便捷、安全的驾驶体验。
此外,FSD入华也将提升用户对高阶智能驾驶的感知和认可度,加速国内主机厂和智驾公司开卷高阶智能驾驶,为高阶智驾商业化落地提供更多可能。
(注:文中提及的Simon、Yasser、Jason和Li均为化名)
这篇关于对话特斯拉北美车主:FSD什么水平?深度用户解密V11的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




