本文主要是介绍多旋翼飞控底层算法开发系列实验 | 多旋翼动力系统设计实验3,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
多旋翼动力系统设计实验3
01/多旋翼动力系统简介
多旋翼无人机的动力系统通常包括螺旋桨、电机、电调以及电池。动力系统是多旋翼最重要的组成部分,它决定了多旋翼的主要性能,如悬停时间、载重能力、飞行速度和飞行距离等。动力系统的部件之间需要相互匹配与兼容,否则很可能无法正常工作,甚至可能在某些极端情况下突然失效导致事故发生。例如在某些条件下,飞控手的一个过激操作可能会让电调电流超过其安全阈值而使电机停转,这在飞行过程中是非常危险的。下面分别介绍螺旋桨、电机、电调以及电池。

02/具体实验内容
基于飞行评估网站的多旋翼动力系统设计
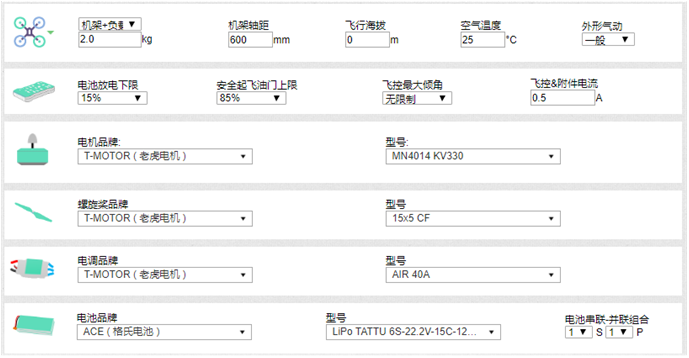
已知:,飞行海拔0m,温度25 ◦C,载重1 kg * 9:8 m/s2 = 9:8N,机架、飞控及配件重量为1 kg * 9:8 m/s2 = 9:8N,外接圆半径小于39.37 英寸(大约1m),总体重量小于5 kg * 9:8 m/s2 = 49N,悬停时间大于15 min,悬停油门小于满油门65%;以此通过飞行评估网站:https://flyeval.com/paper/来设计一架多旋翼飞行器。
求解:设计思路
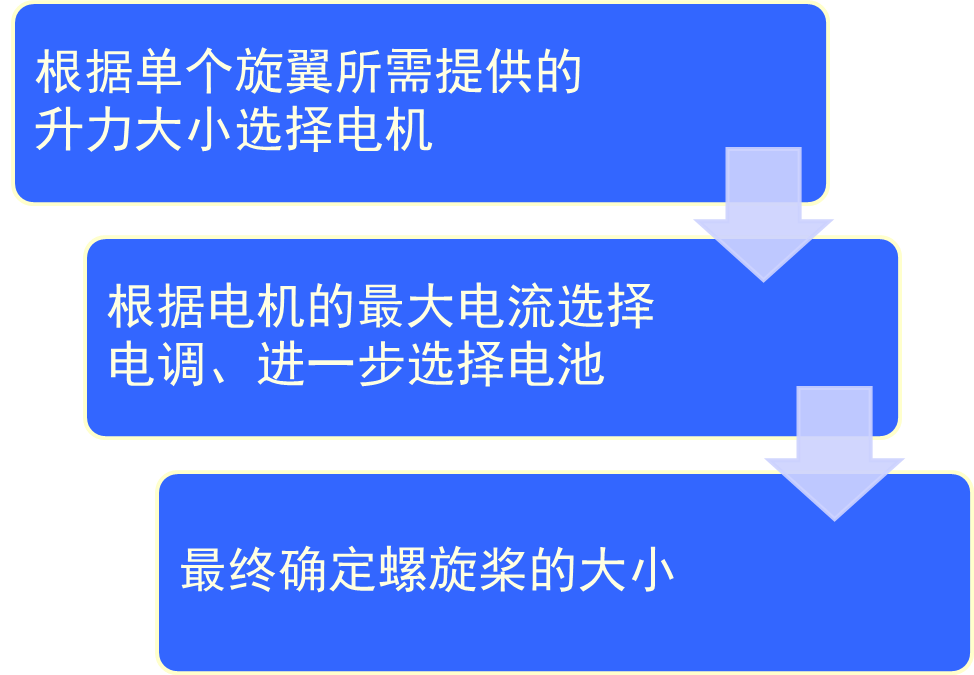
(1)根据单个旋翼所需提供的升力大小选择电机。各电机厂商会提供电机的单轴起飞重量,不同电流下所能提供的升力,以及会推荐螺旋桨的大小,这些数据是电机厂商根据实验得出,可以作为设计多旋翼的参考依据。
(2)选定电机后,即可根据电机的最大电流选择电调,根据电机的供电电压、提供悬停升力时的电机电流和悬停时间选择电池。
(3)根据电机厂商推荐的螺旋桨大小和机架与旋翼最大尺寸的关系即可最终确定螺旋桨的大小。
①. 这里选择常见的四旋翼飞行器,并且满足上述已知条件。
②. 单个螺旋桨拉力计算:当总重量达到上限时单个螺旋桨所需提供的拉力为:
![]()
不考虑动力系统重量,单个螺旋桨所需提供的最小拉力为:
![]()
考虑一定的控制余度:
![]()
注:单个电机提供的拉力范围在7.54N~18.85N之间时会被考虑。
③. 计算螺旋桨的最大尺寸: 根据飞行器的最大尺寸限制,确定螺旋桨的最大尺寸:
![]()
即:
![]()
解得rmax<0.414m考虑一定裕度,螺旋桨最大尺寸范围为:
![]()
注:螺旋桨尺寸一般用直径表示,且单位为英寸,转换得螺旋最大尺寸在27.2~31英寸之间。
④. 可以在各个电机厂商官网上查找合适拉力的电机,例如T-MOTOR电机,进入官网:http://uav-cn.tmotor.com/ ,选择“多旋翼”。根据前面选择计算的最大拉力范围,选择MN系列领航型。如下图所示。

在负载测试数据表格中,我们可以看到MN4014电机,当电压为22.2V,螺旋桨是T-MOTOR 15 5CF时,最大拉力为1.92kg。

注:单个电机提供的拉力范围在7.54N~18.85N之间时会被考虑。
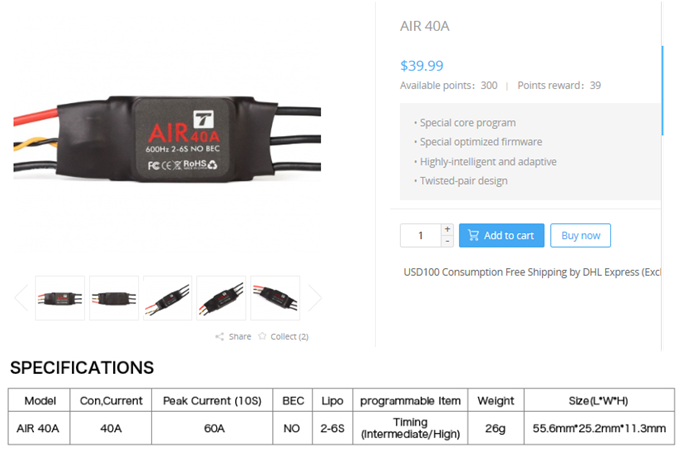
⑤. 选择电调
如选择T-MOTOR电调,因为我们选择的电机的最大电流为25A,我们这里选择电调的持续电流为40A的AIR 40A电调。
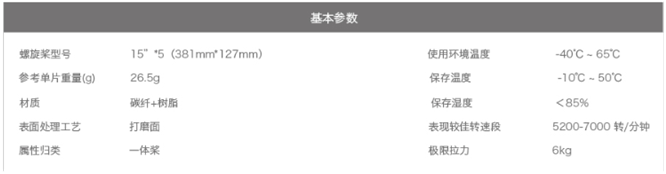
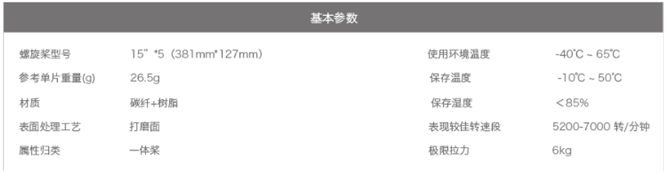
⑥. 选择螺旋桨
根据官方配置,我们选择P15 5螺旋桨,在基本配置中可以看到单个螺旋桨重力为26.5g。

⑦. 选择电池:若选择格式电池,进入公司官网:http://www.ace-pow.com/,在无人机电池中选择高压版。若选择12000mAh的电池,根据前面选择的电机、电调和螺旋桨以及左图中的信息,得到四旋翼总重量为:
![]()
单个螺旋桨所需拉力为:
![]()
此时油门小于65%,在50%~60%油门之间进行简单的线性插值可得拉力为10.6673N,电流为5.78A,计算悬停时间为:
![]()
⑧. 重新计算轴距:根据螺旋桨尺寸重新计算多旋翼轴距:
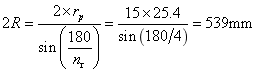
为了留出一定裕度:取轴距=539 1.1=593mm,选择轴距为600mm。
⑨. 使用https://flyeval.com/paper/网站计算飞行参数。
可以看到网站计算的悬停时间与估计的悬停时间比较接近,飞行器的剩余负载还很大,有5.44kg,如果要继续增加续航时间可在整体结构不变的前提下增大电池容量。

参考资料
[1] 全权,杜光勋,赵峙尧,戴训华,任锦瑞,邓恒译.多旋翼飞行器设计与控制[M],电子工业出版社,2018.
[2] 全权,戴训华,王帅.多旋翼飞行器设计与控制实践[M],电子工业出版社,2020.
[3] D. Shi, X. Dai, X. Zhang, and Q. Quan, “A practical performance evaluation method for electric multicopters,” IEEE/ASME Transactions on Mechatronics, vol. 22, no. 3, pp. 1337–1348, 2017..
[4] X. Dai, Q. Quan, J. Ren, and K.-Y. Cai, “An Analytical Design Optimization Method for Electric Propulsion Systems of Multicopter UAVs with Desired Hovering Endurance,” IEEE/ASME Transactions on Mechatronics, vol. 24, no. 1, pp. 228–239, 2019
[5] X. Dai, Q. Quan, J. Ren, and K.-Y. Cai, “Efficiency Optimization and Component Selection for Propulsion Systems of Electric Multicopters. IEEE Transactions on Industrial Electronics, vol. 66, no. 10, pp. 7800–7809, 2019.
[6] X. Dai, C. Ke, Q. Quan and K. -Y. Cai, “Simulation Credibility Assessment Methodology With FPGA-based Hardware-in-the-Loop Platform,” IEEE Transactions on Industrial Electronics, vol. 68, no. 4, pp. 3282-3291, 2021.
[7] X. Dai, C. Ke, Q. Quan and K. -Y. Cai, “RFlySim: Automatic test platform for UAV autopilot systems with FPGA-based hardware-in-the-loop simulations,” Aerospace Science and Technology, vol. 114, p. 106727, 2021.
这篇关于多旋翼飞控底层算法开发系列实验 | 多旋翼动力系统设计实验3的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







