本文主要是介绍IND-yff-第三周,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
比赛中机器人由于不能及时准确认识对方防守而使己方进攻缺乏目的性与针对性的问题,为准确优化设计进攻目标策略,本文提出一种的进攻路径选择算法。算法利用防守影响值来分析评估对方机器人对我方进攻的威胁度,提高策略的实用及可行性,使球队的整体能力得到改善。
(1)防守影响值
在选择进攻的线路时,综合考虑以下两个因素:一是在不被截球的前提下,我方的进攻线路应尽可能靠近对方门线: 是防守方对我方进攻任务的威胁最小化。为合理分析防守方队员对我方进攻的威胁程度,本文提出防守影响值的概念对防守方队员进行防守影响值分析。
防守影响值:是指敌方防守机器人对当前进攻的威胁程度。机器人防守影响值越大,说明该机器人对进攻的威胁程度越大。传统的防守威胁性确定方法主要是从静态视角出发,依据机器人与球的距离,而没有考虑对象之间的动态特性对威胁性的影响;而在高速比赛中,速度是威胁性的关键因素。因此传统的威胁性确定方法不足以满足比赛的高精度、实时性的要求,本文提出的用于评估机器人防守影响值模型如下式:

f(Ej)为对方机器人j对我方本次进攻的威胁度,也就是j的防守影响值。共中,d为机器人与目标点之间的距离;θd为机器人与目标位置的连线与机器人方向之间的夹角;θv为机器人方向与球的运动方向之间的夹角,角度定义在[0.π]之间;V为球速。k1 k2和k3为常数,三者不能同时为0。
具体来说,可以将机器人与球之间的距离、角度以及距离角度变化趋势作为分析机器人防守影响值的关键。防守机器人与球的距离越短、角度越小,并且两者之间的运动是相向的,那么机器人就越能对我方进攻进行干扰和破坏。
假设进行进攻规划时,需要分析的敌方球员为E=1E。,E…,…,E.1,B为球,1.为对方门线。RoboCup中机器的人基本动作为转动和平动,这两个基本动作构成了其他较为复杂的运动、对于转动和平动参数,设定在仿真平台每周期,球员原地最多旋转s度,直线移动的最大路程为 为公平地表示角度和距离对防守影响值的影响,(k1*d+k2*θd)应取:
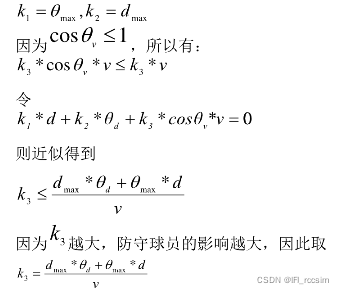
防守影响值分析模型的构建到此结束,依次计算对方n个机器人应用防守影响值分析模型,得到他们的防守影响值。
这篇关于IND-yff-第三周的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!