本文主要是介绍AutoSAR CANIF层配置代码分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
CAN物理控制单元
配置: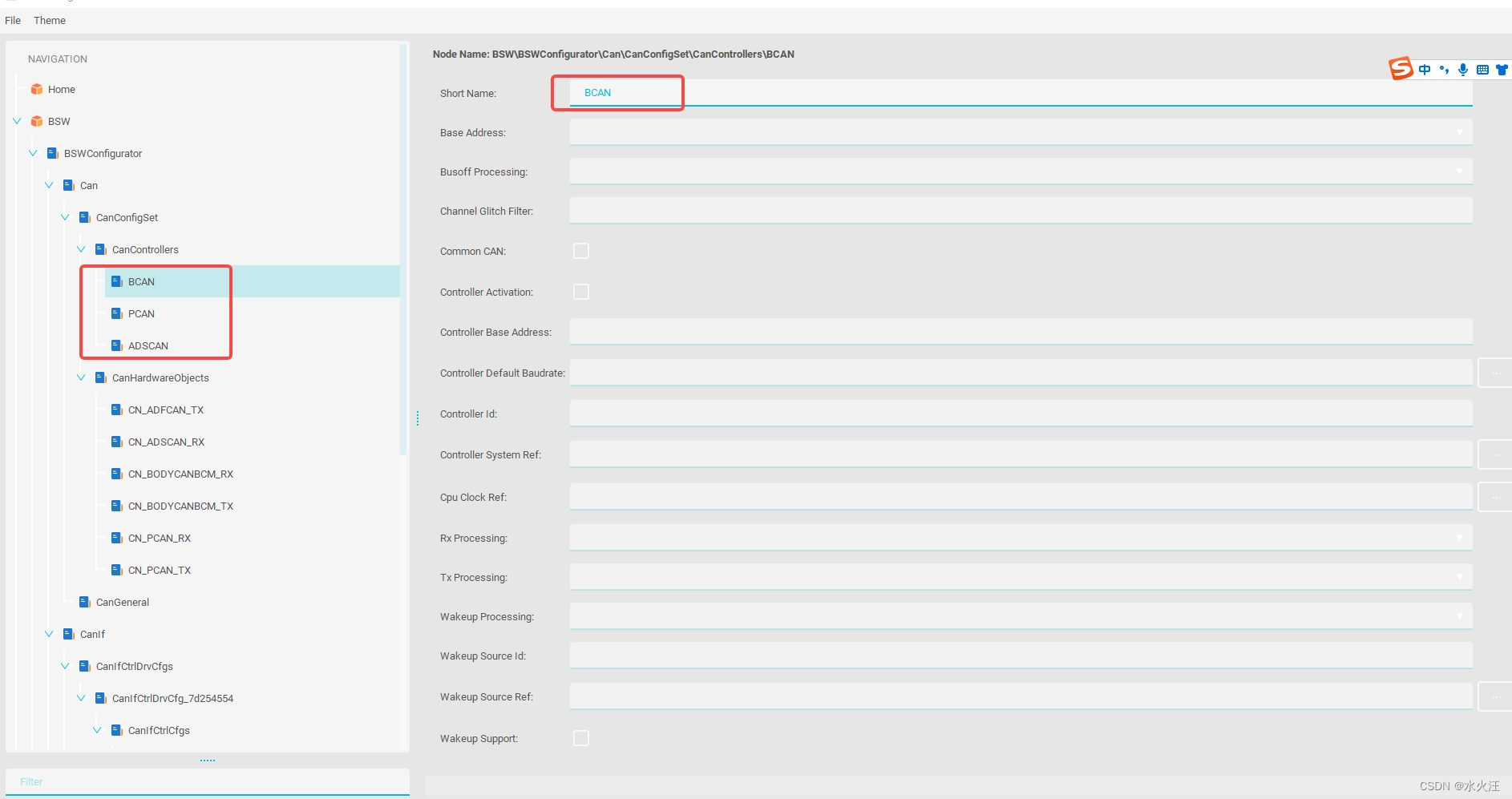
生成的代码:
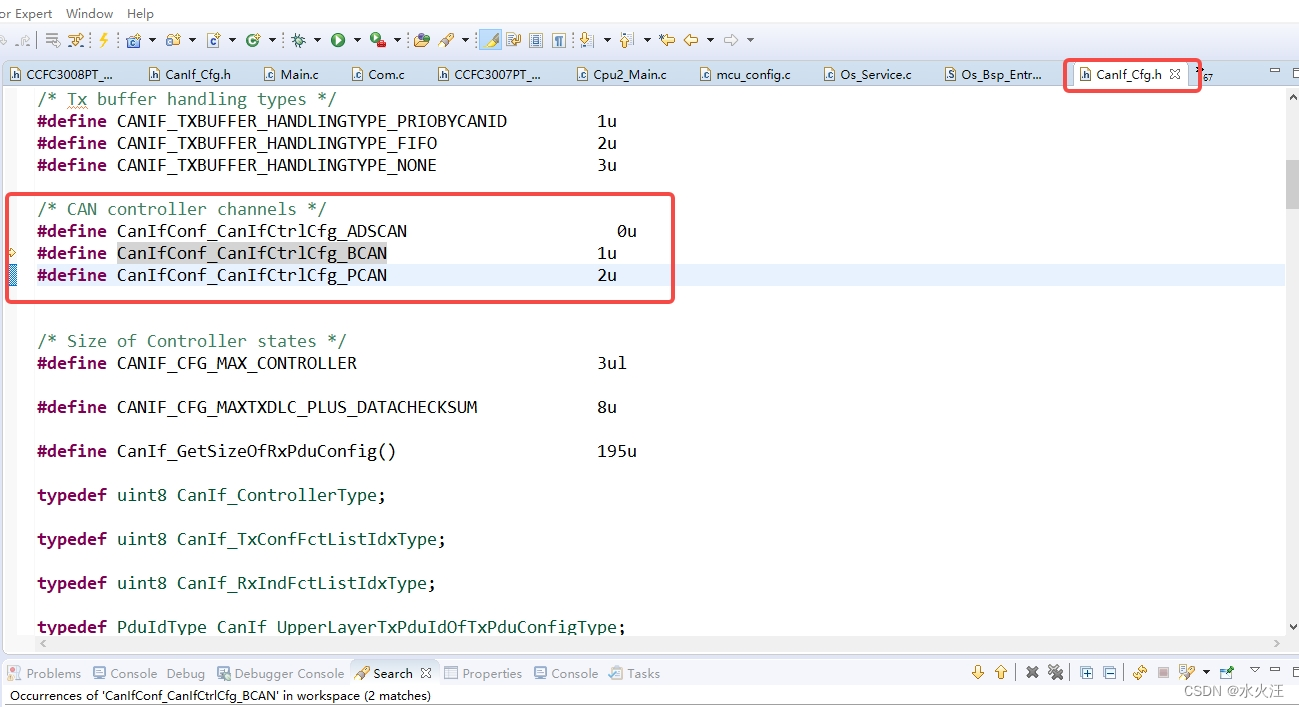
CanIf_CtrlStates 解析
类型:
typedef union CanIf_CtrlStatesUTag
{CanIf_CtrlStatesType raw[3];CanIf_CtrlStatesStructSType str;
}CanIf_CtrlStatesUType;typedef struct sCanIf_CtrlStatesType
{CanIf_ControllerModeType CtrlMode;CanIf_PduGetModeType PduMode;CanIf_NotifStatusType TxConfState;
}CanIf_CtrlStatesType;typedef struct CanIf_CtrlStatesStructSTag
{CanIf_CtrlStatesType ADSCAN;CanIf_CtrlStatesType BCAN;CanIf_CtrlStatesType PCAN;
}CanIf_CtrlStatesStructSType;CAN控制器模式:
typedef enum
{CANIF_CS_UNINIT = 0u,CANIF_CS_STOPPED,CANIF_CS_STARTED,CANIF_CS_SLEEP
} CanIf_ControllerModeType;PDU模式:
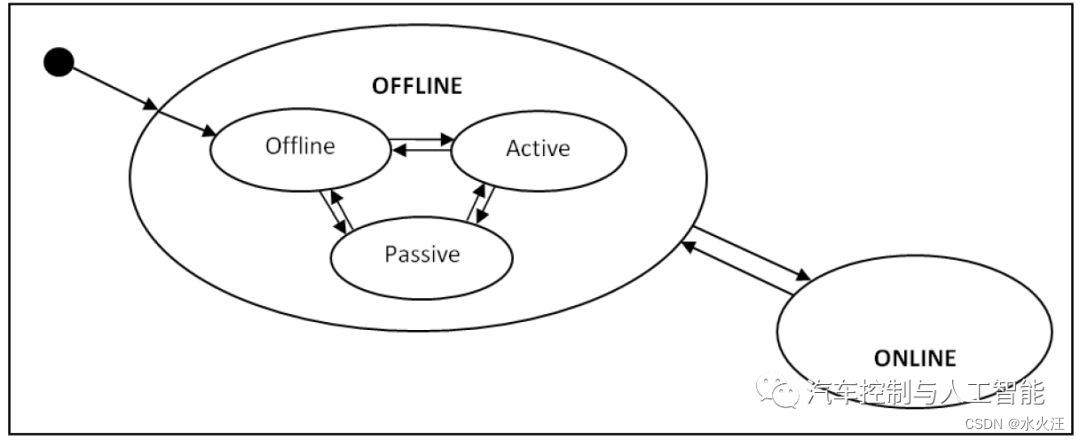
只允许在对应的控制器模式等于CAN_CS_STARTED时,更改PDU通道模式,在初始化期间,CanIf应该将每个通道切换到CANIF_OFFLINE。如果调用CanIf_SetControllerMode(),则CanIf会将对应通道的PDU通道模式设置为CANIF_OFFLINE。
如果调用CanIf_SetControllerMode()或CanIf_ControllerBusOff(),则CanIf应将相应通道的PDU通道模式设置为CANIF_TX_OFFLINE。
示意图:
发送状态:
typedef enum
{CANIF_NO_NOTIFICATION = 0u,CANIF_TX_RX_NOTIFICATION
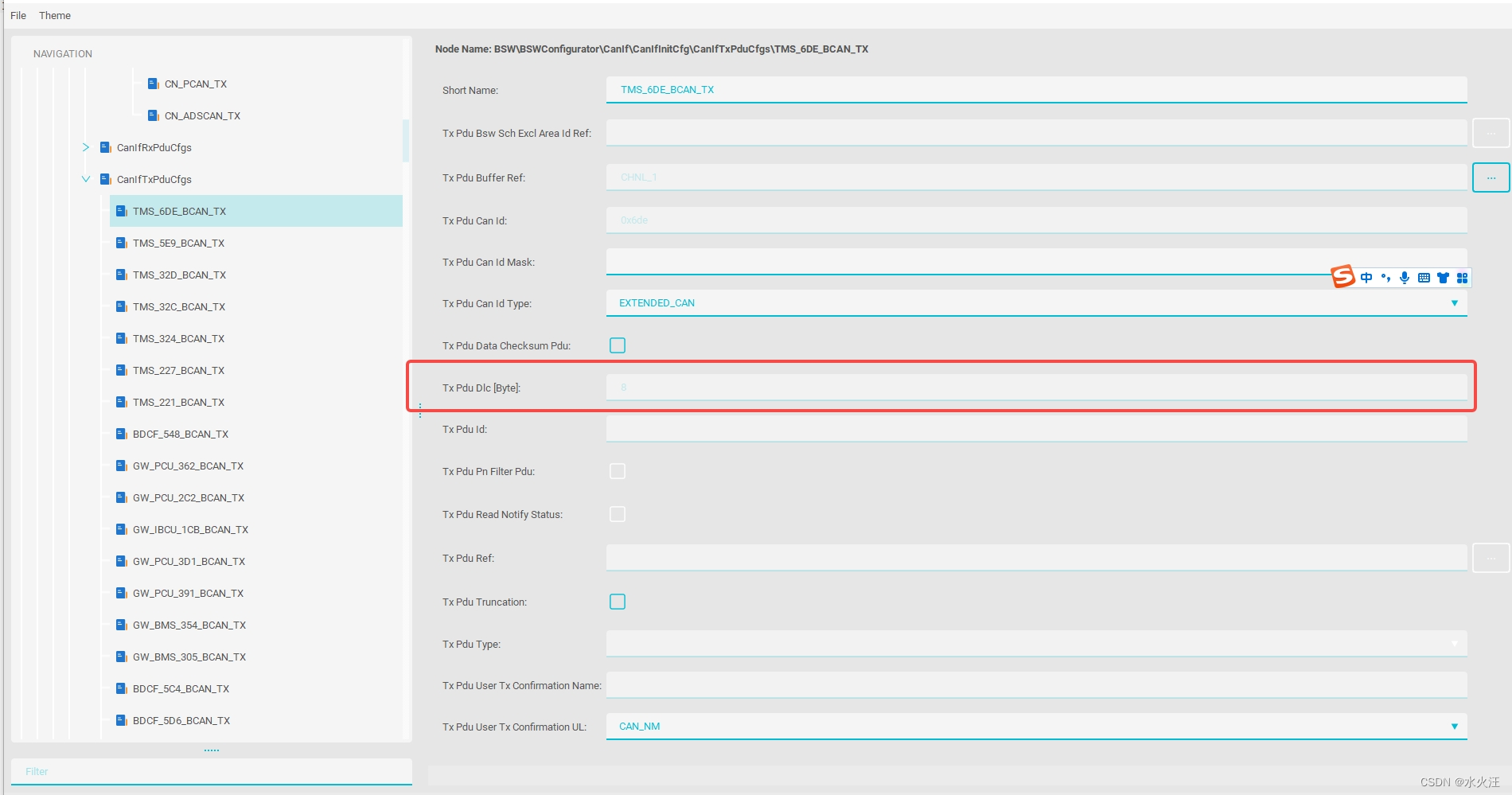
} CanIf_NotifStatusType;CanIf_TxPduConfig
typedef struct sCanIf_TxPduConfigType
{CanIf_UpperLayerTxPduIdOfTxPduConfigType UpperLayerTxPduId;uint16 CanId;boolean IsDataChecksumTxPdu;boolean IsTxPduTruncation;CanIf_ControllerType CtrlStatesIdx;uint8 MailBoxConfigIdx;CanIf_TxConfFctListIdxType TxConfirmationFctListIdx;uint8 TxPduLength;
}CanIf_TxPduConfigType;- CtrlStatesIdx: CAN控制器的通道
配置:
- CanId: canid 有四种配置 扩展CAN 、标准CAN、扩展CANFD、标准CANFD。
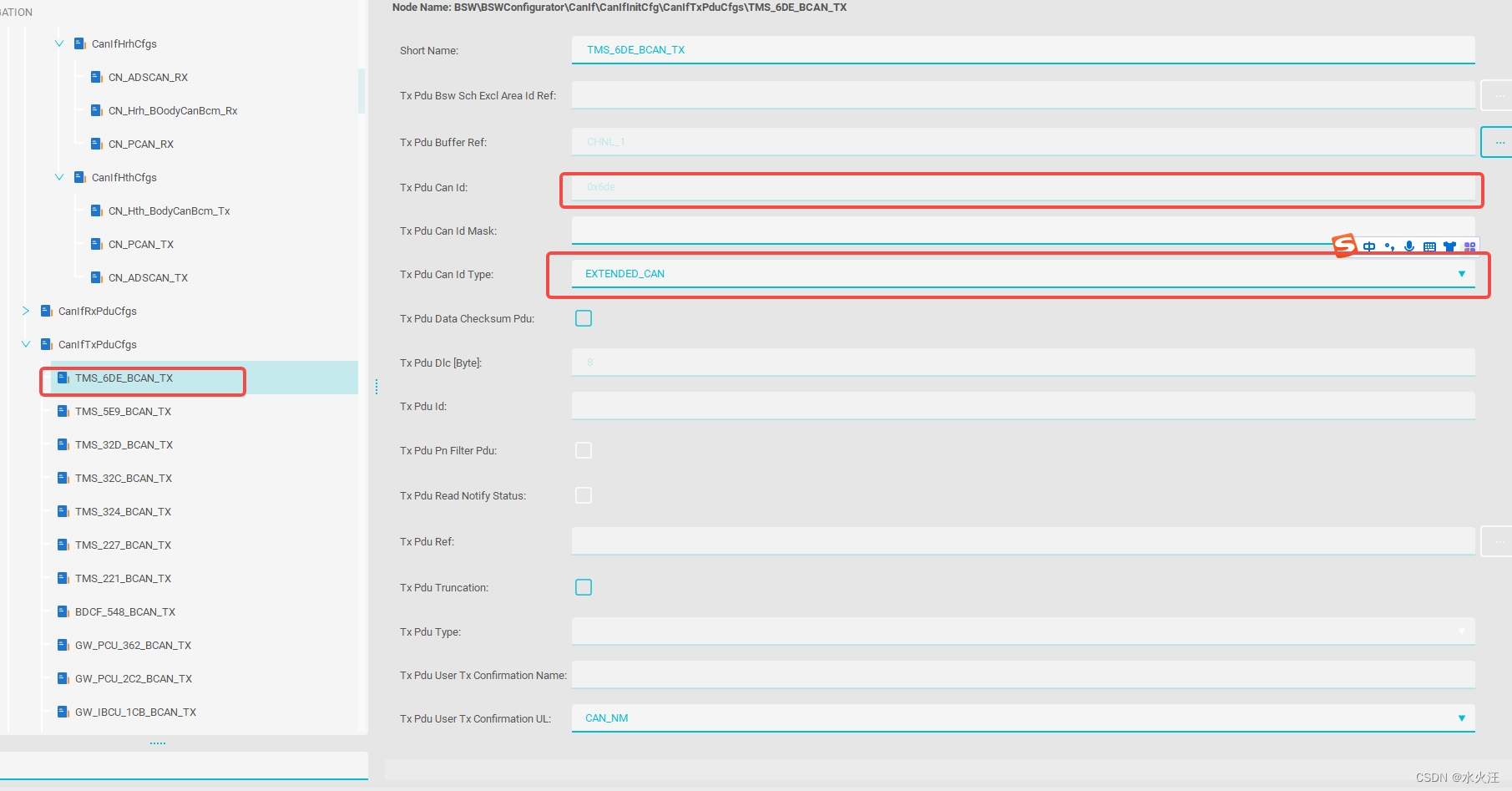
- IsDataChecksumTxPdu :数据校验
配置:
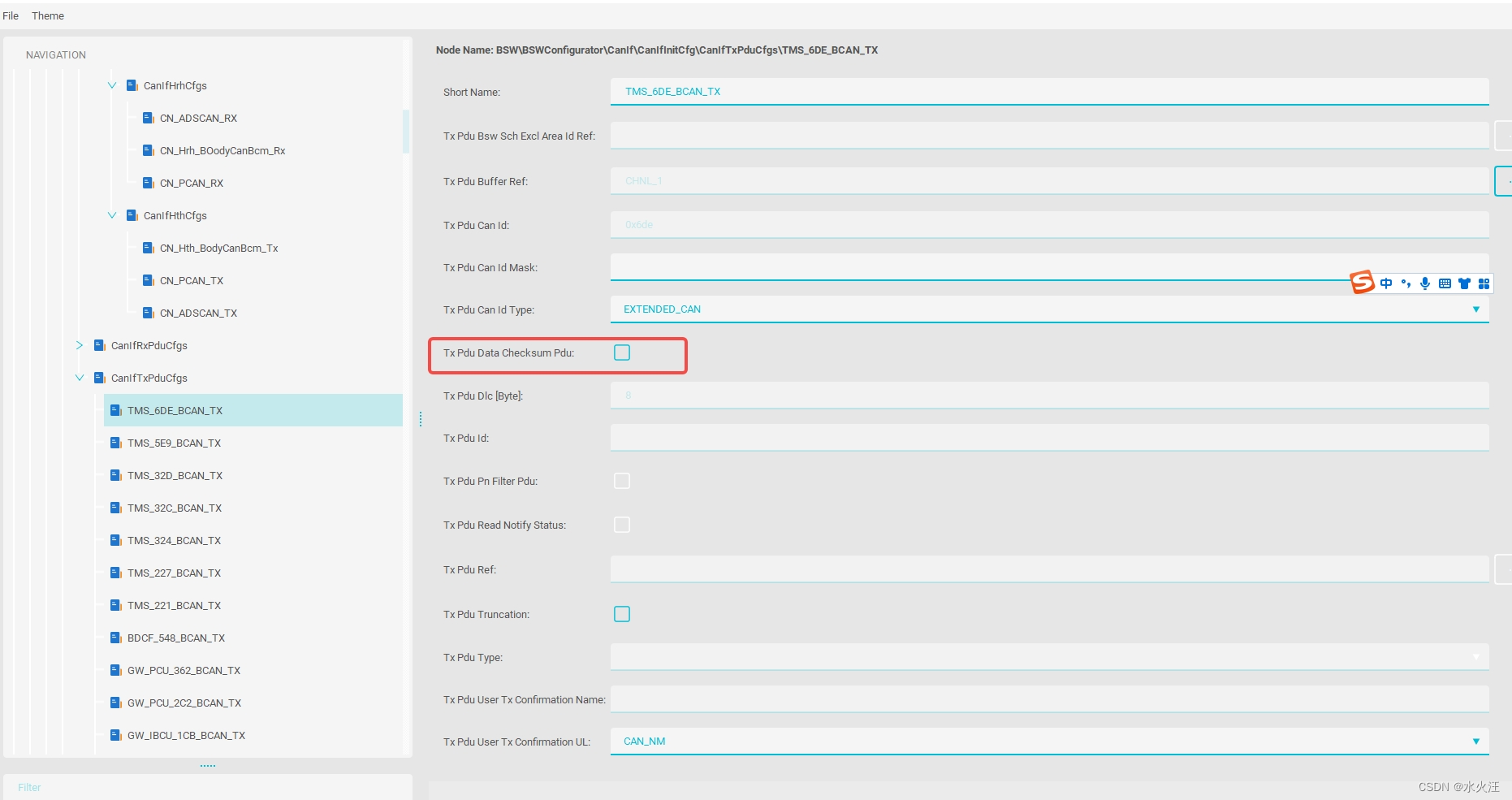
代码位置:
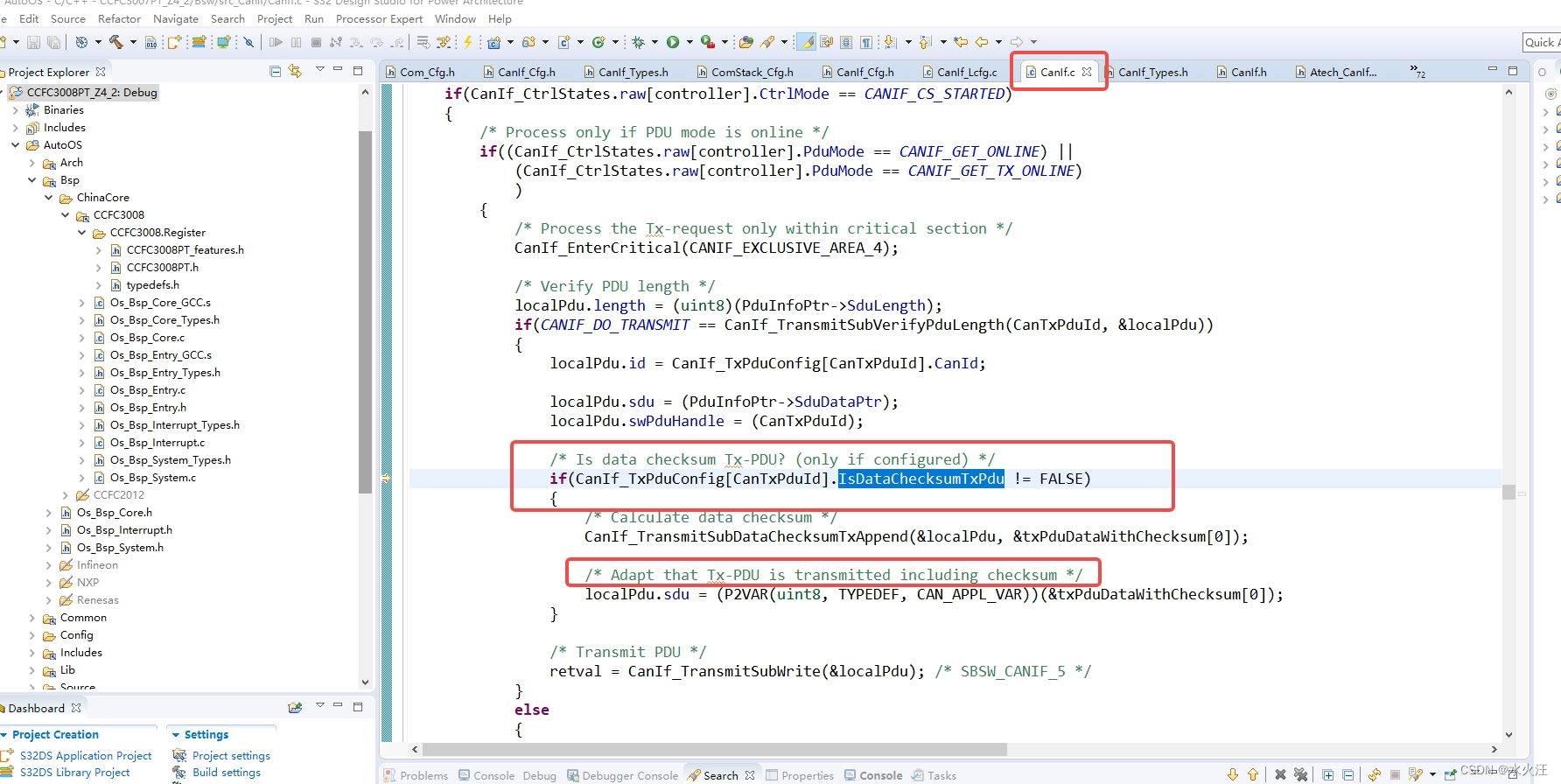
- IsTxPduTruncation: 为TRUE时,配置最大长度。
上位机配置:
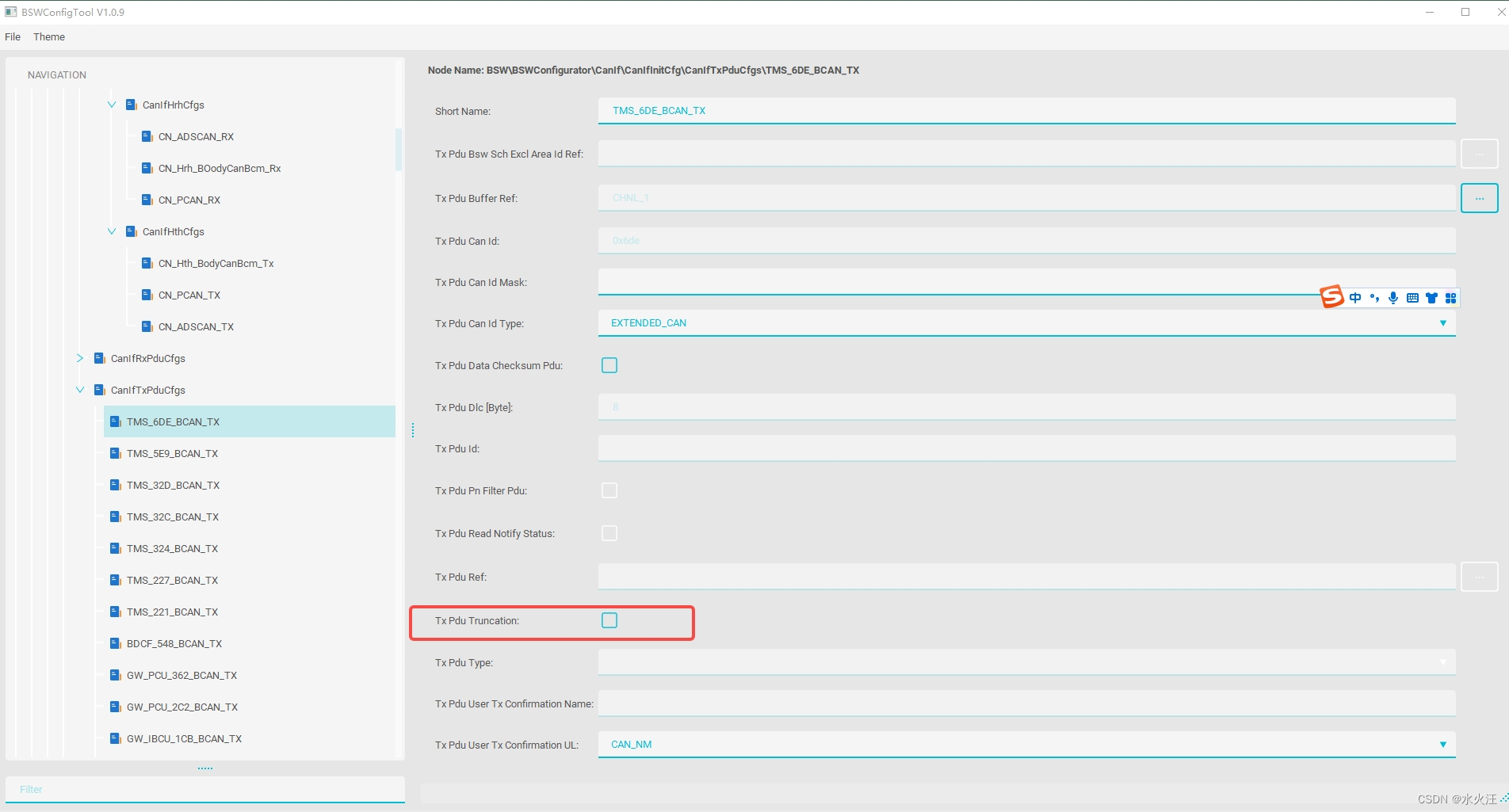
代码位置:

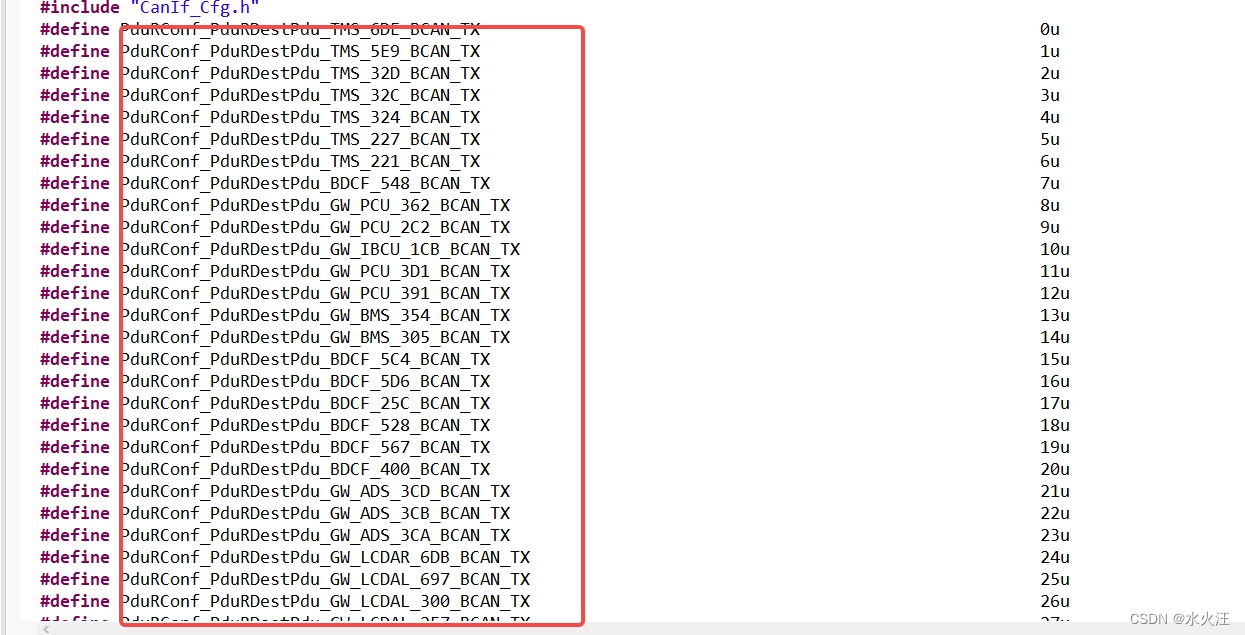
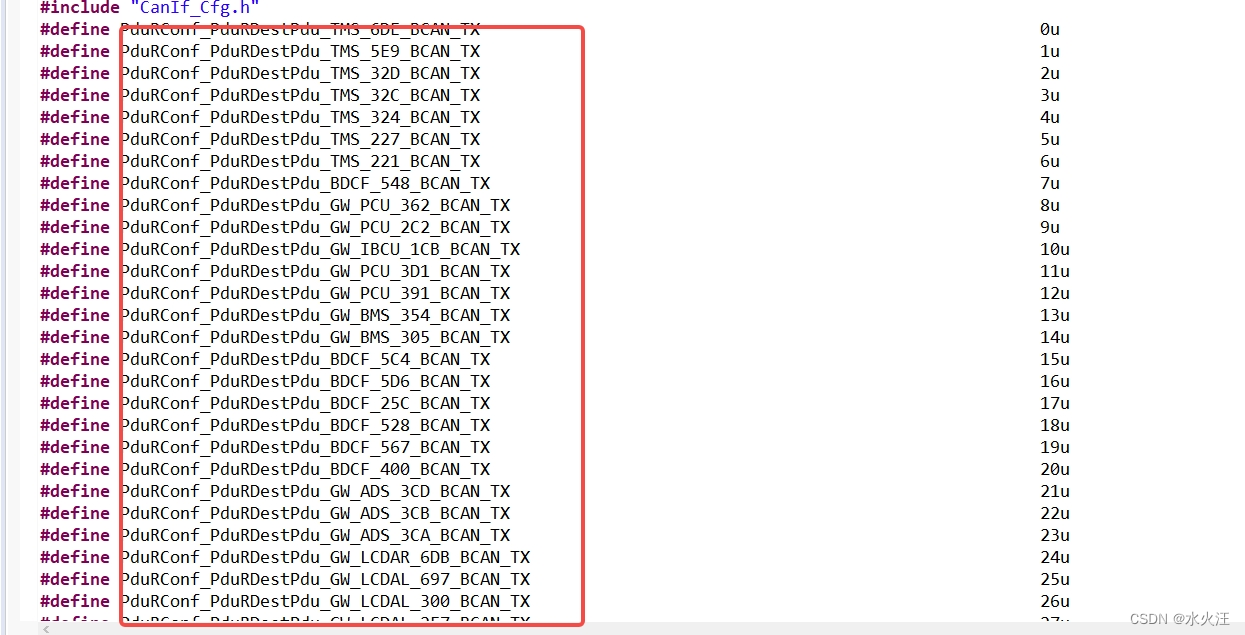
- UpperLayerTxPduId: PDU 的ID
示例:
代码:
- MailBoxConfigIdx :CANIF 信箱,后面介绍
- TxConfirmationFctListIdx:CanIf_TxConfirmationFctList[]数组下标
发送确认回调函数
CONST(CanIf_TxConfirmationFctType, CANIF_VAR_NOINIT) CanIf_TxConfirmationFctList[2] = {CAN_NM_CanIfTxConfirmation,PDUR_CanIfTxConfirmation,
};- TxPduLength: 发送PDU长度
上位机配置:
CanIf_MailBoxConfig
mailbox 涉及的数据结构挺多的,主要是CAN控制器发送的缓存buffer fifo之类的
CanIf_CanIfCtrlId2MappedTxBuffersConfig
/* Get all HTHs with configured Tx-buffer of affected CAN-channel */for(idx2MappedTxBufferCfg = CanIf_CanIfCtrlId2MappedTxBuffersConfig[ControllerId].StartIdx;idx2MappedTxBufferCfg < CanIf_CanIfCtrlId2MappedTxBuffersConfig[ControllerId].EndIdx;idx2MappedTxBufferCfg++ )从上面的代码可以得出,主要是为每个CAN控制器所配置的TX buffer
CONST(CanIf_CanIfCtrlId2MappedTxBuffersConfigType, CANIF_VAR_NOINIT) CanIf_CanIfCtrlId2MappedTxBuffersConfig[1] = {{ 3u, 0u },
};typedef struct sCanIf_CanIfCtrlId2MappedTxBuffersConfigType
{uint8 EndIdx;uint8 StartIdx;
}CanIf_CanIfCtrlId2MappedTxBuffersConfigType;CanIf_MappedTxBuffersConfig
hth = CanIf_MappedTxBuffersConfig[idx2MappedTxBufferCfg].MailBoxConfigIdx;typedef struct sCanIf_MappedTxBuffersConfigType
{uint8 MailBoxConfigIdx;
}CanIf_MappedTxBuffersConfigType;
CONST(CanIf_MappedTxBuffersConfigType, CANIF_VAR_NOINIT) CanIf_MappedTxBuffersConfig[3] = {{ 1u },{ 2u },{ 5u },
};主要是此变量主要是去映射到CanIf_MailBoxConfig的配置。
CanIf_MailBoxConfig
定义:
typedef struct sCanIf_MailBoxConfigType
{uint8 CtrlStatesIdx;uint8 PduIdFirst;uint8 PduIdLast;uint8 TxBufferCfgIdx;uint8 TxBufferHandlingType;CanIf_MailBoxTypeType MailBoxType;
}CanIf_MailBoxConfigType;CONST(CanIf_MailBoxConfigType, CANIF_VAR_NOINIT) CanIf_MailBoxConfig[6] = {{ 0u, 0u, 1u, 255u, CANIF_TXBUFFER_HANDLINGTYPE_NONE, CANIF_UnusedCANMailbox },{ 0u, 0u, 0u, 0u, CANIF_TXBUFFER_HANDLINGTYPE_FIFO, CANIF_TxBasicCANMailbox },{ 1u, 0u, 0u, 2u, CANIF_TXBUFFER_HANDLINGTYPE_FIFO, CANIF_TxBasicCANMailbox },{ 1u, 2u, 47u, 255u, CANIF_TXBUFFER_HANDLINGTYPE_NONE, CANIF_UnusedCANMailbox },{ 2u, 49u, 50u, 255u, CANIF_TXBUFFER_HANDLINGTYPE_NONE, CANIF_UnusedCANMailbox },{ 2u, 0u, 0u, 1u, CANIF_TXBUFFER_HANDLINGTYPE_FIFO, CANIF_TxBasicCANMailbox },
};这里面有个TxBufferCfgIdx,是CanIf_TxBufferFifoConfig的下标。
CanIf_TxBufferFifoConfig
主要是TXBuffer位置的配置
typedef struct sCanIf_TxBufferFifoConfigType
{uint16 TxFifoQueueDataEndIdx;uint16 TxFifoQueueDataStartIdx;uint8 SizeOfOnePayloadEl;uint8 TxBufferFifoBaseIdx;uint16 TxFifoQueueBaseEndIdx;uint8 TxFifoQueueBaseLength;uint16 TxFifoQueueBaseStartIdx;
}CanIf_TxBufferFifoConfigType;CONST(CanIf_TxBufferFifoConfigType, CANIF_VAR_NOINIT) CanIf_TxBufferFifoConfig[3] = {{ 800u, 0u, 8u, 0u, 100u, 100u, 0u },{ 1600u, 800u, 8u, 1u, 200u, 100u, 100u },{ 2400u, 1600u, 8u, 2u, 300u, 100u, 200u },
};其中的8为单位递增单元,0、800、1600、为3个buff开始的位置,3个100 对应的是 800 除以8,TxFifoQueueBaseEndIdx的结构没有用到,与之对应的结构是CanIf_TxFifoQueueData。
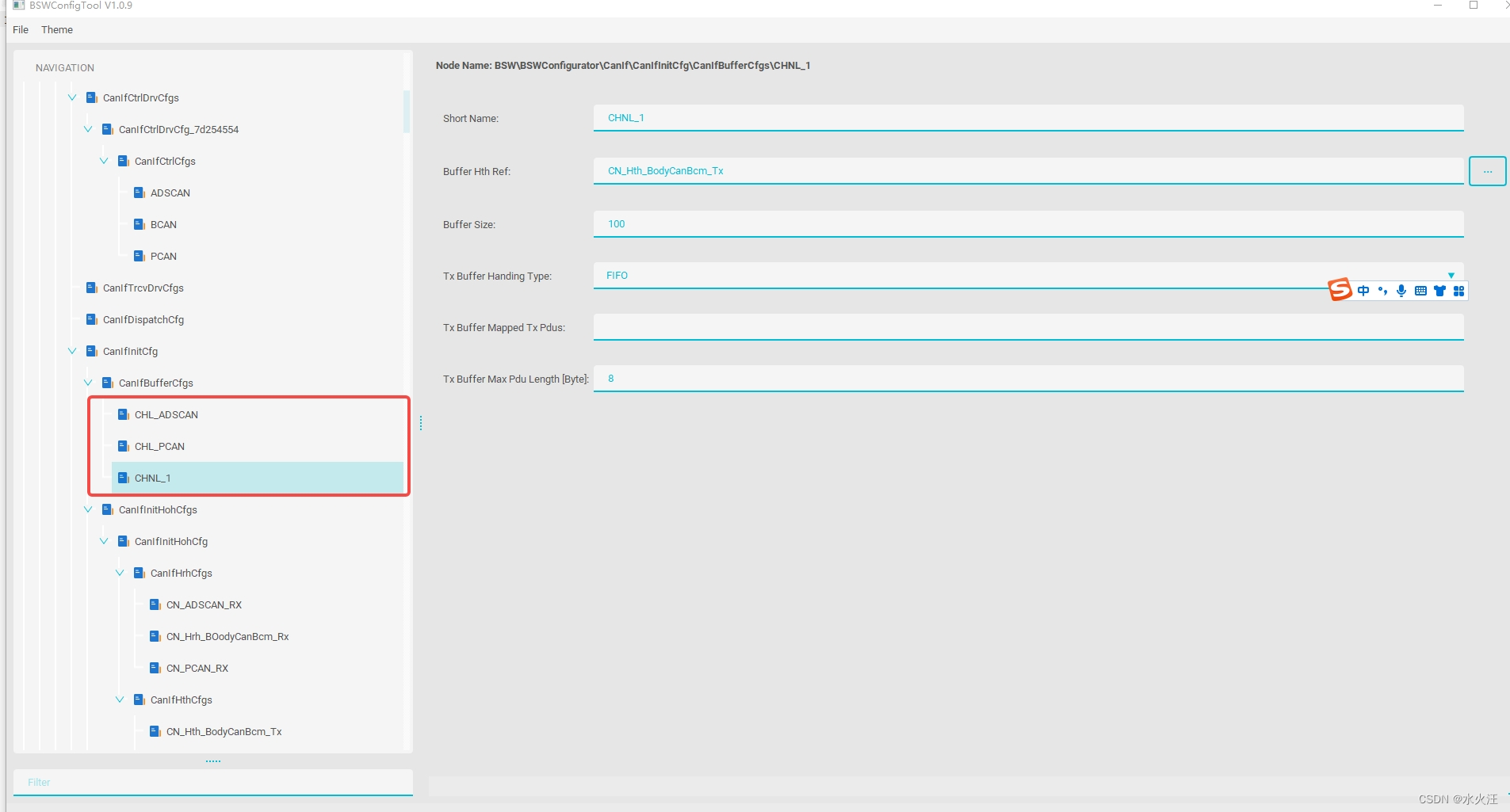
其中TxBufferFifoBaseIdx为 CanIf_TxBufferFifoBase.raw数组的下标。其中TxFifoQueueBaseLength 为100是上位机配置的:
CanIf_TxBufferFifoBase
typedef union CanIf_TxBufferFifoBaseUTag
{CanIf_TxBufferFifoBaseType raw[3];CanIf_TxBufferFifoBaseStructSType str;
}CanIf_TxBufferFifoBaseUType;在CanIf_ClearQueue函数中进行初始化的
switch (CanIf_MailBoxConfig[hth].TxBufferHandlingType){case CANIF_TXBUFFER_HANDLINGTYPE_FIFO:/* Clearing of FIFO */txBufferFifoBaseIdx = CanIf_TxBufferFifoConfig[txBufferCfgIdx].TxBufferFifoBaseIdx;/* Set ReadIdx, WriteIdx and QueueCounter to 0 */CanIf_TxBufferFifoBase.raw[txBufferFifoBaseIdx].eWriteIdx = 0;CanIf_TxBufferFifoBase.raw[txBufferFifoBaseIdx].eReadIdx = 0;CanIf_TxBufferFifoBase.raw[txBufferFifoBaseIdx].eQueueCounter = 0;break;default:break;}CanIf_TxFifoQueueData
typedef union CanIf_TxFifoQueueDataUTag
{uint8 raw[2400];CanIf_TxFifoQueueDataStructSType str;
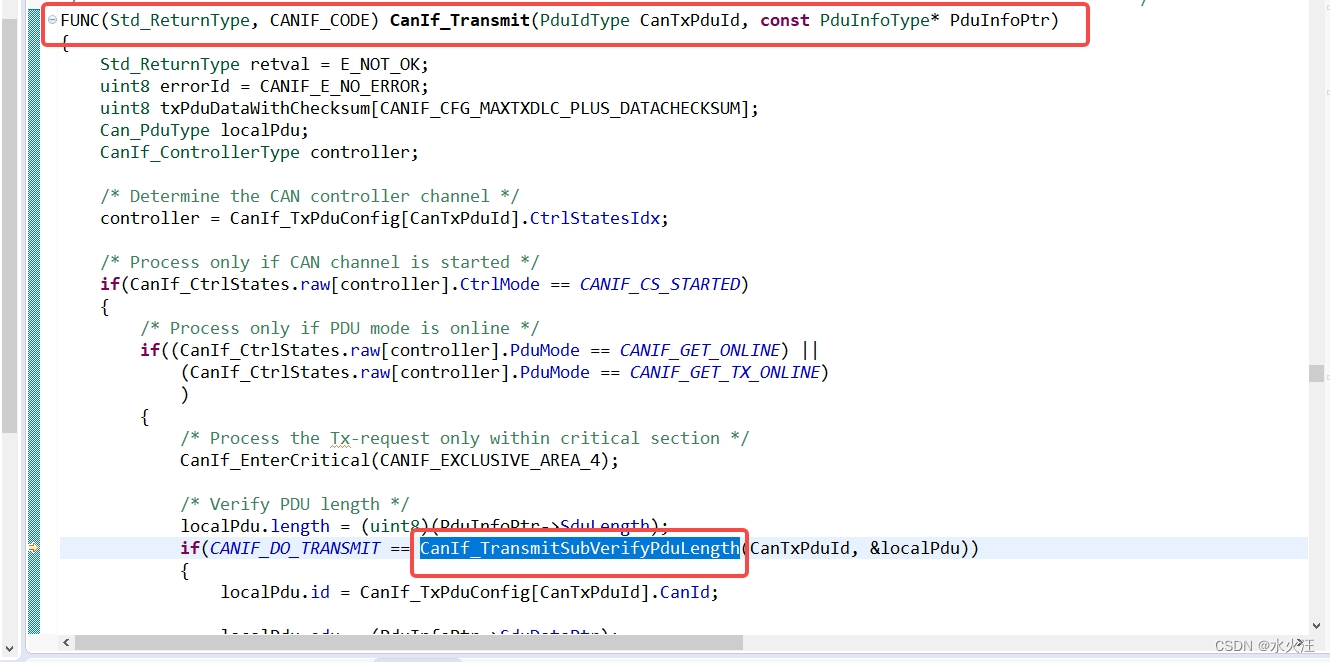
}CanIf_TxFifoQueueDataUType;CanIf_TransmitSubWrite API 介绍
定义:
CANIF_LOCAL_INLINE FUNC(Std_ReturnType, CANIF_CODE) CanIf_TransmitSubWrite(P2CONST(Can_PduType, AUTOMATIC, AUTOMATIC) localPduPtr)此函数传递的参数为PDU,数据结构为:
typedef struct Can_PduTypeTag
{Can_IdType id;uint8 length;Can_SduPtrType sdu;PduIdType swPduHandle;
} Can_PduType;此函数主要判断CAN控制器的模式是否使能,PDU是否使能,以及PDU的校验,之后调用CanIf_TransmitSubWrite 函数。
CanIf_TransmitSubWrite
在此函数中判断此PDU的发送方式是否为FIFO,如果为FIFO则判断FIFO是否为空,为空则直接调用Can_Write().
相关代码:
if(CanIf_MailBoxConfig[CanIf_TxPduConfig[localPduPtr->swPduHandle].MailBoxConfigIdx].TxBufferHandlingType == CANIF_TXBUFFER_HANDLINGTYPE_FIFO){/* If Tx-PDU is mapped to Tx-buffer of handling type FIFO it must only be transmitted directly if FIFO is empty */doCanWrite = CanIf_TransmitSubCheckFiFoQueueEmpty(localPduPtr->swPduHandle);}if(doCanWrite == TRUE){//txResult = Can_Write((CanIf_HwHandleType)CanIf_TxPduConfig[localPduPtr->swPduHandle].MailBoxConfigIdx, (P2CONST(Can_PduType, AUTOMATIC, CANIF_VAR_STACK))localPduPtr);}否则调用CanIf_TransmitSubHandleTxResBusy,缓存到队列 buffer中。
CanIf_TransmitSubHandleTxResBusy
此函数主要是将PDU的数据拷贝到缓冲区,也就是TX buffer中。
/* Evaluate FIFO-WriteIdx */txFifoQueueBaseStartIdx = CanIf_TxBufferFifoConfig[txBufferCfgIdx].TxFifoQueueBaseStartIdx;writeIdx = CanIf_TxBufferFifoBase.raw[txBufferFifoBaseIdx].eWriteIdx;/* Store length of Tx-PDU at FIFO-WriteIdx */CanIf_TxFifoQueueBase.raw[writeIdx + txFifoQueueBaseStartIdx].eBaseParams.eSduLength = localPduPtr->length;/* Store the PDU ID of the Tx-PDU at FIFO-WriteIdx */CanIf_TxFifoQueueBase.raw[writeIdx + txFifoQueueBaseStartIdx].eTxPduId = localPduPtr->swPduHandle;其中txFifoQueueBaseStartIdx为0,100,200 乘以8 就是每个buff开始写的位置。0,800,1600.
后面的是用CanIf_TxFifoQueueBase保存PDU的长度和PDU 的ID。
queueDataStartIdx = ((uint32_least)writeIdx * (uint32_least)CanIf_TxBufferFifoConfig[txBufferCfgIdx].SizeOfOnePayloadEl) + CanIf_TxBufferFifoConfig[txBufferCfgIdx].TxFifoQueueDataStartIdx;/* Store data of Tx-PDU at FIFO-WriteIdx */memcpy(&CanIf_TxFifoQueueData.raw[queueDataStartIdx], localPduPtr->sdu, localPduPtr->length);/* Increment the FIFO-counter */CanIf_TxBufferFifoBase.raw[txBufferFifoBaseIdx].eQueueCounter++;将PDU的数据拷贝的缓冲区。
这篇关于AutoSAR CANIF层配置代码分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







