canif专题

【S32K3 MCAL配置】-4.3-CAN Driver:不使用RTD中CanIf模块来实现接收/发送CAN帧报文
"><--返回「Autosar_MCAL高阶配置」专栏主页--> 目录(共4页精讲,基于评估板: NXP S32K312EVB-Q172,手把手教你S32K3从入门到精通) 实现的架构:基于MCAL层 前期准备工作:
Autosar-CanIf模块介绍
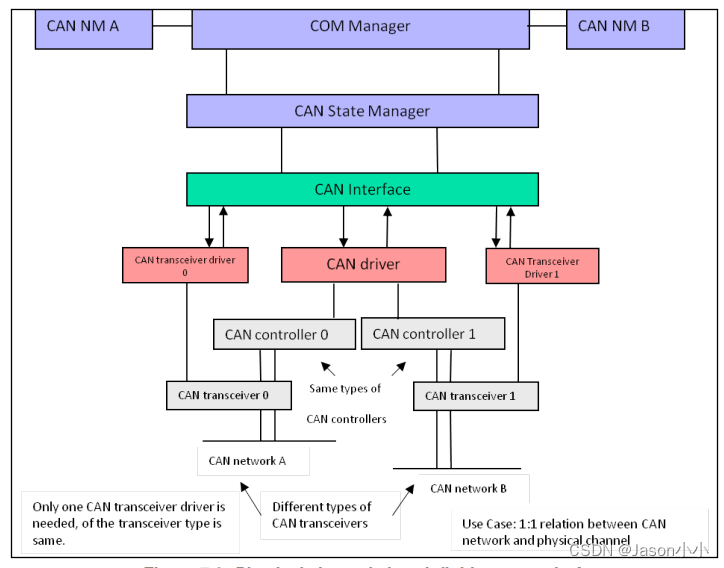
4.1CanIf模块简介 CanIf模块是为了要隔离MCal层与服务层,因此CanIf不可直接操作硬件资源。然而CanIf传输数据、接收数据要使用到Can模块的缓存,如果直接使用Can模块的缓存的话,那CanIf就与MCal层耦合在一起了。 为了解决这个问题,CanIf层使用了一个HOH的概念:Hardware Object。HOH根据发送与接收的不同,又分为HTH和HRH: Hardware T

达芬奇CAN配置----CANIF
CANIF是属于承上启下的一层,为CAN抽象层的范畴,对接MACL的CAN驱动层, 对接CANIF的上层为多种,PDUR、CANTP、CANSM、CANNM、ECUM,具体上层往哪边传,需要你在配置的过程中选,DBC中对相应的信号也要配置好,如:哪些是诊断报文、哪些是网络管理报文、XCP不需要在DBC中做特殊的处理,在配置的过程中选到XCP协议即可 在导入 dbc后,配置完CAN模块,
Autosar通信实战系列10-CanIf模块要点及其配置介绍(二)
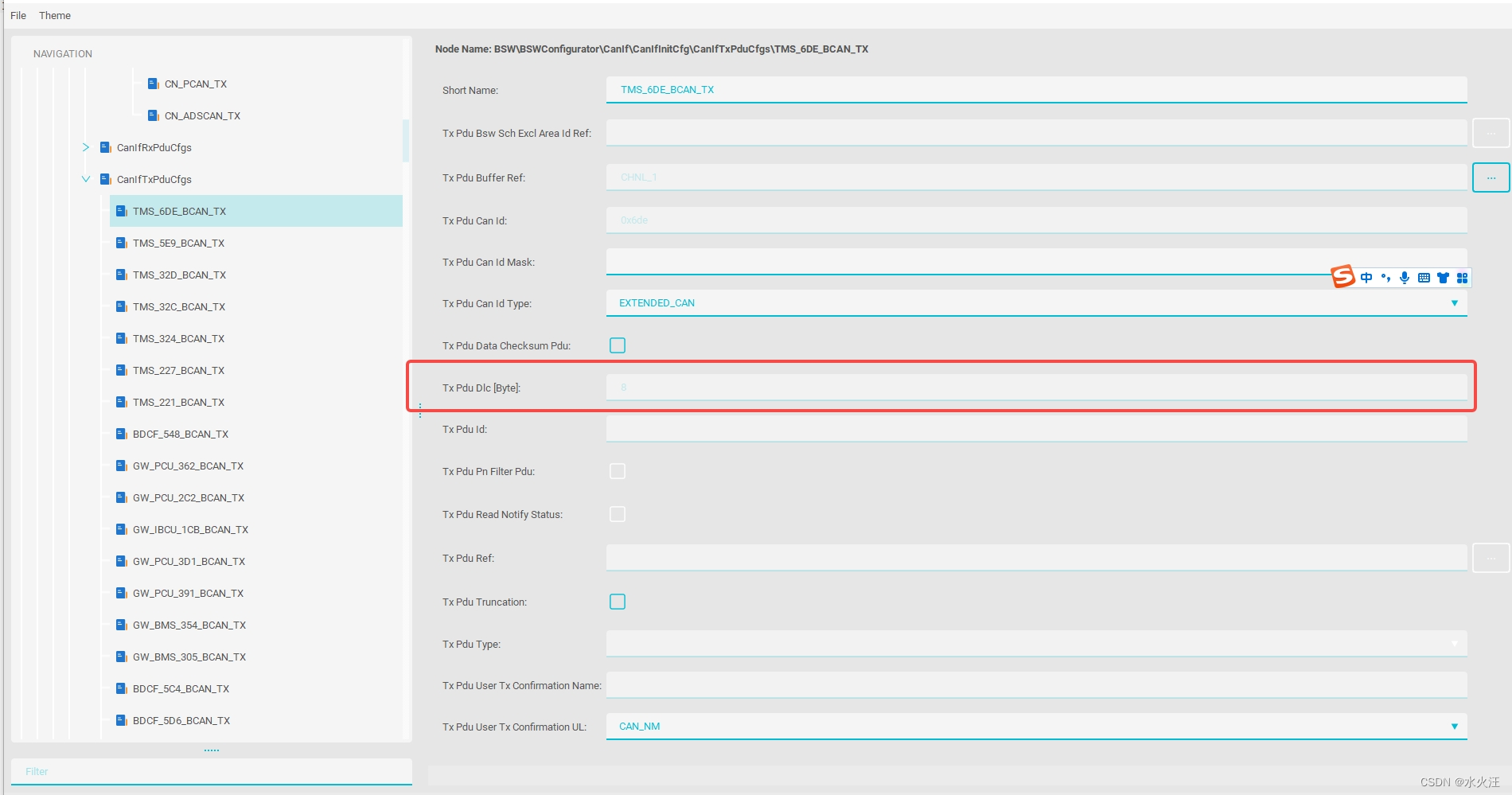
本文框架 前言1. CanIf模块配置1.1 CanIfCtrlDrvCfg1.2 CanIfTrcvDrvCfg1.3 CanIfDispatchCfg1.4 CanIfInitCfg1.4.1 CanIfBufferCfg1.4.2 CanIfHrhCfg1.4.3 CanIfHthCfg1.4.4 CanIfRxPduCfg1.4.5 CanIfTxPduCfg 1.5 CanIfPr
AutoSAR CANIF层配置代码分析
CAN物理控制单元 配置: 生成的代码: CanIf_CtrlStates 解析 类型: typedef union CanIf_CtrlStatesUTag{CanIf_CtrlStatesType raw[3];CanIf_CtrlStatesStructSType str;}CanIf_CtrlStatesUType;typedef struct sCanIf_
CanIf Transmit Buffering 机制说明
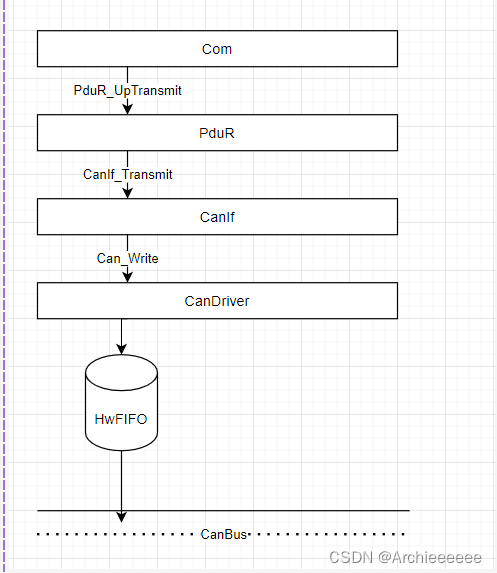
目录 前言未使能场景的报文发送机制使能场景的报文发送机制如何配置 前言 在AUTOSAR CanIf 中,提供了发送的Buffering机制 。对于一个报文来说,Buffering起始于CanIf_Transmit,结束于CanIf_TxConfirmation 。 主要应用与一个MailBox 发送多个报文的场景,用于解决因为硬件发送不及时而导致的发送失败的问题 未使能场景的