本文主要是介绍PUMA560机器人D-H参数和改进DH参数,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
最近做了一下PUMA560的轨迹规划,发现它的DH参数多种多样,但大部分没说明是DH还是改进DH。我在此整理一下我最近的收获。
文章目录
- 1、PUMA560四种参数
- 2、标准DH和改进DH的区别和转化
- 3、PUMA560的DH参数多的原因
- 4、总结
1、PUMA560四种参数
链接:简直要崩溃了,PUMA560机器人DH参数表,你们见过多少个版本?.
先按这个同学列出的4个不同形式的参数来分析,我把这4个归类为3种。
原因有下:
1.1、如下图所示为一般的PUMA 560的结构简图,有个特殊的参数 d6,在一般形式中是省略的。而这个同学找到的4种参数种第2和第3种都带了d6。并且第3种形式没有a3,这可能是a3为0的情况,因为a3相对很小,有把它设为零的情况。所以第2和第3种为一种形式的参数。
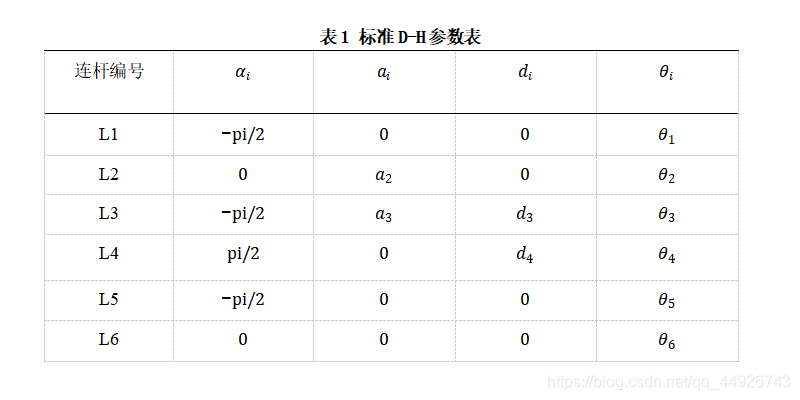
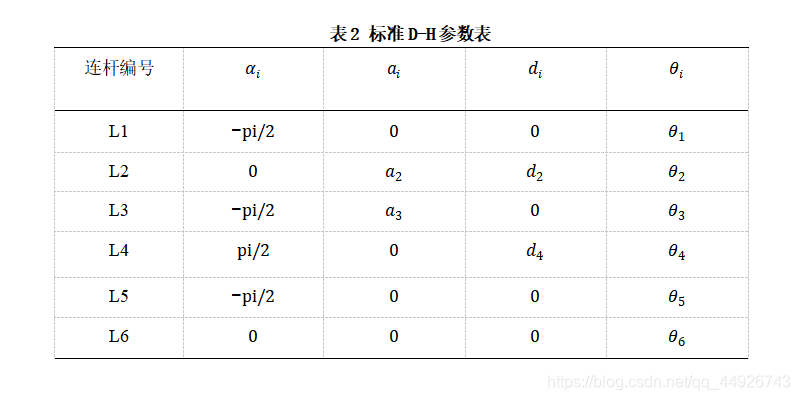
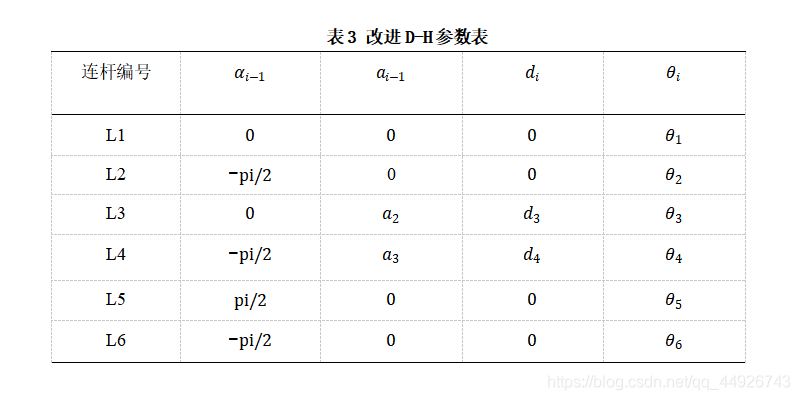
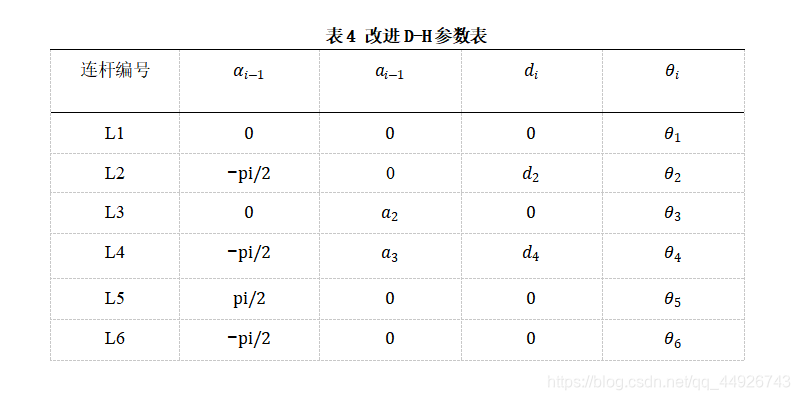
 1.2、我认为的四种分类应如下表所示。
1.2、我认为的四种分类应如下表所示。
按标准DH和改进DH分类:
2、标准DH和改进DH的区别和转化
2.1、链接: 标准DH和改进DH的区别.
这个大佬介绍的很详细了,可以作为参考。
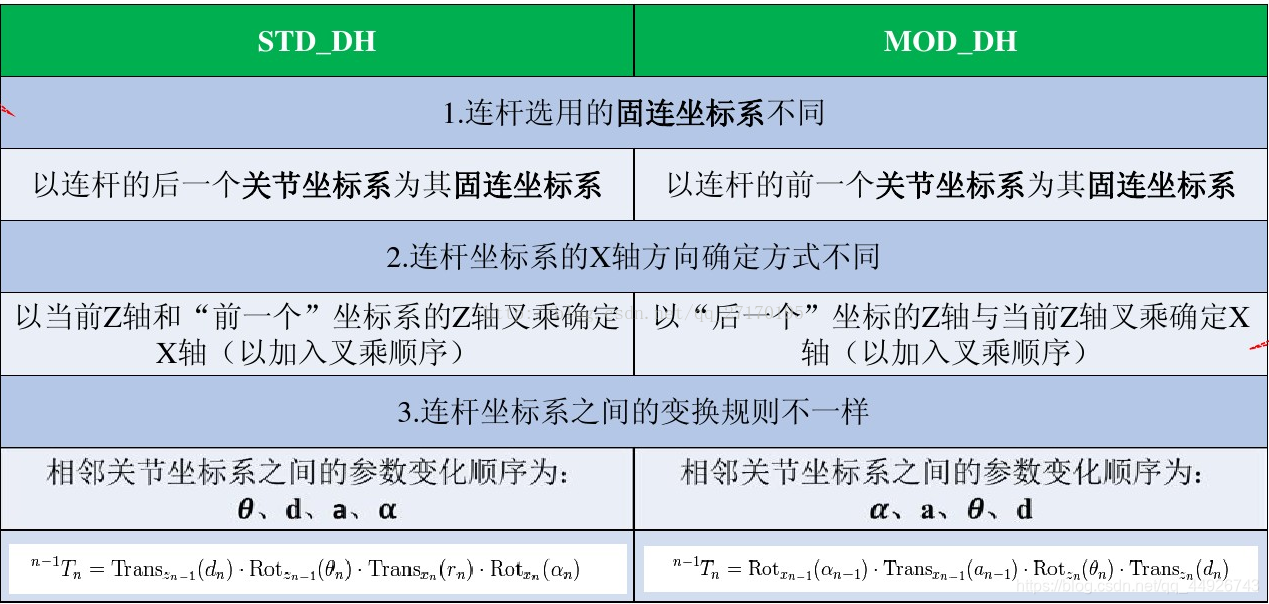
关于第3点连杆坐标系之间的变化规则不一样:

2.1.1、对S_DH来说,如上图所示:
θi依托于Zi-1轴,αi依托于Xi轴,因此需要先绕Zi-1轴旋转θi,再绕Xi轴旋转αi,才能保证后一杆与前一杆的相对位置。
2.1.2、对M_DH来说,如上图所示:
αi-1依托于Xi-1轴,θi依托于Zi轴,因此需要先绕Xi-1轴旋转αi-1,再绕Zi轴旋转θi,才能保证后一杆与前一杆的相对位置。
如果先绕Zi-1轴旋转θi,那么Xi-1轴就改变位置了,αi-1将不是正确的参数。
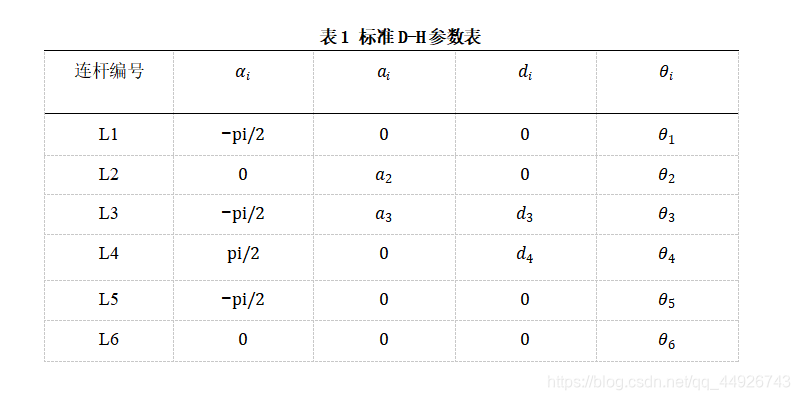
2.2、至于标准DH和改进DH的转化可以参考下面的表。标准DH转化为改进DH可以将αi和ai均向下平移一格。如:
代码如下:
%%标准D-H模型
% theta d a alpha offset
SL1=Link([0 0 0 -pi/2 0 ],'standard');
SL2=Link([0 0 0.432 0 0 ],'standard');
SL3=Link([0 0.149 0.02 -pi/2 0 ],'standard');
SL4=Link([0 0.433 0 pi/2 0 ],'standard');
SL5=Link([0 0 0 -pi/2 0 ],'standard');
SL6=Link([0 0 0 0 0 ],'standard');
p560=SerialLink([SL1 SL2 SL3 SL4 SL5 SL6],'name','puma560');
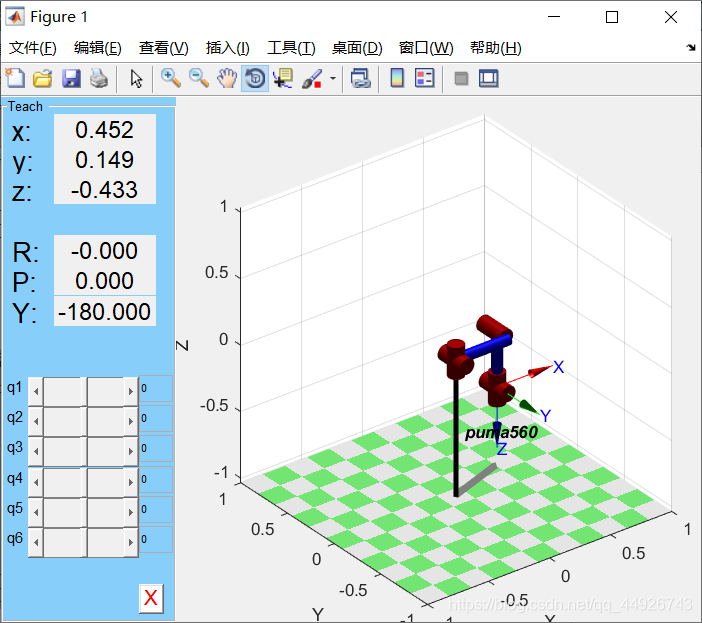
p560.teach([0 0 0 0 0 0]);
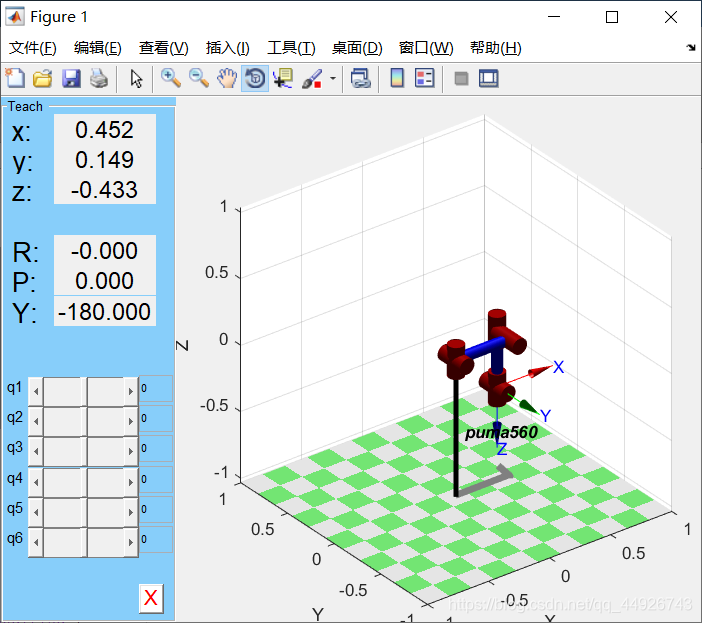
效果如图
可转化成下面的形式
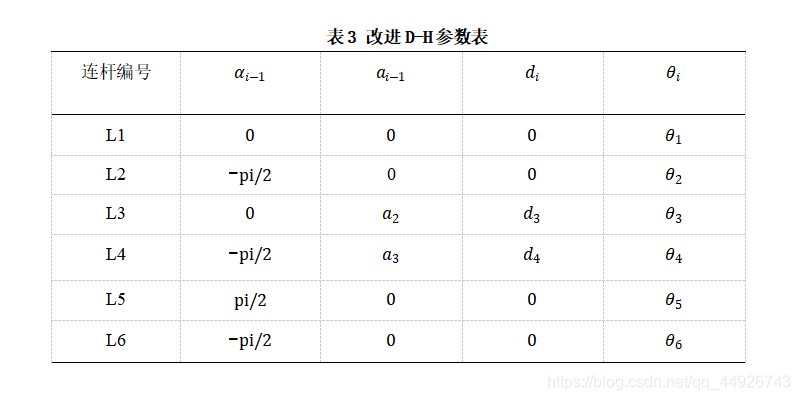
%%改进D-H模型
% theta d a alpha offset
SL1=Link([0 0 0 0 0 ],'modified');
SL2=Link([0 0 0 -pi/2 0 ],'modified');
SL3=Link([0 0.149 0.432 0 0 ],'modified');
SL4=Link([0 0.433 0.02 -pi/2 0 ],'modified');
SL5=Link([0 0 0 pi/2 0 ],'modified');
SL6=Link([0 0 0 -pi/2 0 ],'modified');
p560=SerialLink([SL1 SL2 SL3 SL4 SL5 SL6],'name','puma560');
p560.teach([0 0 0 0 0 0]);
效果如图
链接: 为什么改进的DH模型优于标准DH模型,却大多都是使用标准D-H模型?.
现在大多使用的是标准DH模型,我做可视化urdf模型时也依托于标准DH模型。我百度了一下,发现知乎回答的还可以。
但是一些国内教材和资料描述PUMA560大多采用改进DH参数,而且有的还不标注是改进DH,我当时看的也是一脸懵。看的时候需要多注意。
3、PUMA560的DH参数多的原因
说完标准DH和改进DH的原因,还有另一个原因。
链接: Puma560 机器人DH变换.
由于关节轴2平行于关节轴3,公垂线有无数条。因此坐标系{2}的选择无穷多,这也是参数多版本DH表的原因
大佬的这句话解决了我很多疑惑,写的很棒,讲明白了为什么在改进DH参数中有两种类型。同样标准DH参数也有两种类型。因此我认为PUMA50的参数有4种类型。
4、总结
这就是我认为PUMA560的四种DH参数。
还有其他的PUMA 560的DH参数,与上表的连杆扭角αi不相同,这样的可以稍微推导一下也一样归为我分的四类。
下面下载是一个PUMA560的正逆解,有需要的可以去下载。
下载链接: MATLAB的PUMA560机械臂的正逆解及应用举例.
写的可能不好,希望对大家有帮助。欢迎大家交流指正。
这篇关于PUMA560机器人D-H参数和改进DH参数的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



