puma560专题
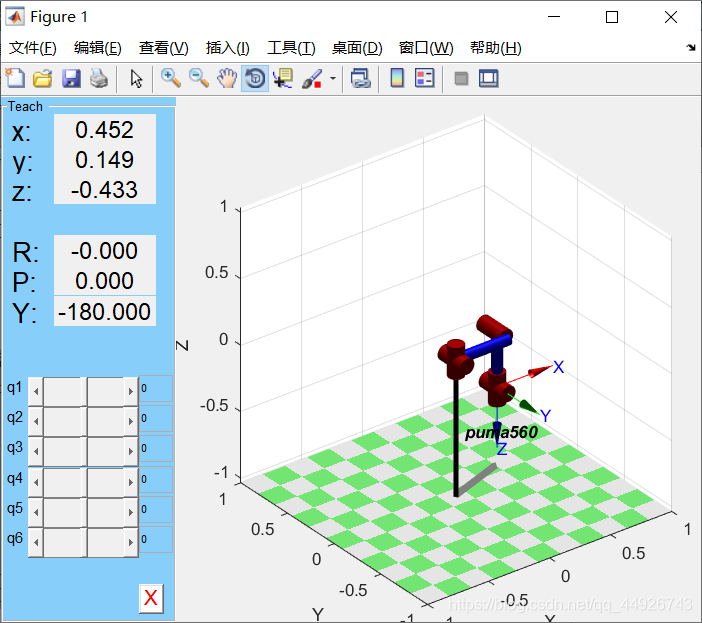
【matlab与机器人】PUMA560运动学逆解
经观察,PUMA560机器人的逆解在任何参考书中均一致。自己推了一遍,matlab代码使用了 基于Matlab的PUMA 560运动学与轨迹规划仿真 - 灰信网(软件开发博客聚合) (freesion.com) 的参考代码。经实验,该段代码能够正确回推各个θ角度。 下面先总结推导过程中用到的一般方法与思路,供迁移到其他机器人的建模上使用。 方法1:构造sinx与cosx的函数,使用
PUMA560机器人D-H参数和改进DH参数
最近做了一下PUMA560的轨迹规划,发现它的DH参数多种多样,但大部分没说明是DH还是改进DH。我在此整理一下我最近的收获。 文章目录 1、PUMA560四种参数2、标准DH和改进DH的区别和转化3、PUMA560的DH参数多的原因4、总结 1、PUMA560四种参数 链接:简直要崩溃了,PUMA560机器人DH参数表,你们见过多少个版本?. 先按这个同学列出的4个不同形式的

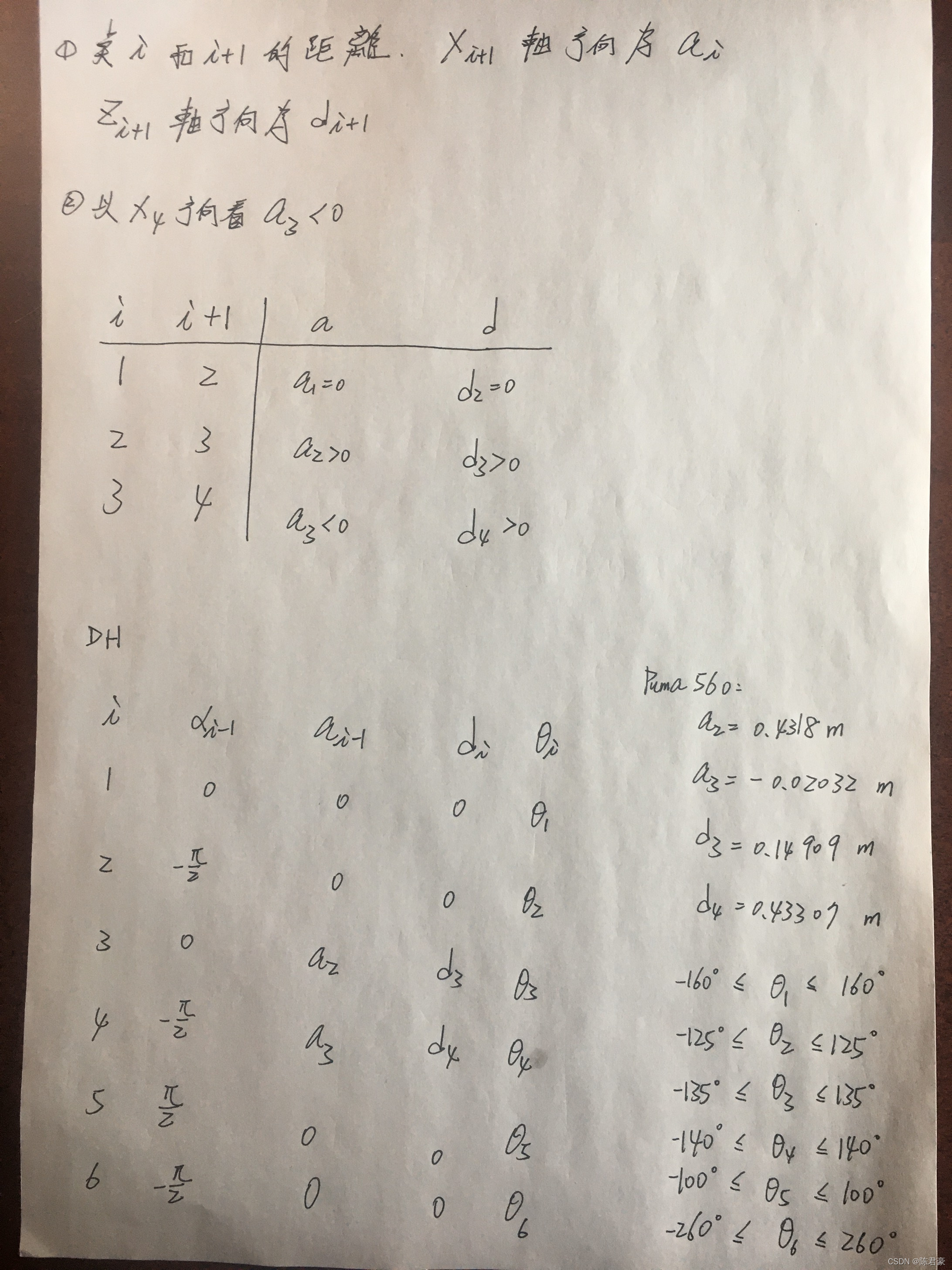
Puma560 DH table
步骤: 1. 先画出每个旋转轴的xyz坐标,以及每个轴的原点 2. theta是旋转轴,定义theta1-theta6,注意alpha和a是从0-5, d和theta是从1-6,因为alpha和a是从原坐标的角度看的 3. alpha是根坐标往新坐标移动时,原坐标x轴的旋转角度,逆时针是正,顺时针是负,alpha0一定是0,alpha1是坐标1顺时针旋转90度变成坐标2,所