本文主要是介绍深度之眼Paper带读笔记GNN.08.GCN,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 前言
- 前期知识基础要求
- 论文结构
- 学习目标
- 研究背景
- 研究意义
- 泛读
- 摘要
- 论文标题
- 精读
- 模型总览
- 网上例子
- 原文例子
- 频域和空域Spatial vs Spectral
- 细节一:R-GCN模型结构
- 细节二:拉普拉斯矩阵Laplacian matrix
- 拉普拉斯算子
- 拉普拉斯矩阵
- 拉普拉斯矩阵的性质
- 拉普拉斯矩阵例子
- 细节三:图的频域变换
- 图的频域变换Graph spectral
- 图频域变换证明
- 小结
- 细节四:卷积核介绍
- 图卷积核初代目
- 图卷积核二代目
- 契比雪夫多项式例子
- 小结
- GCN公式推导
- 实验设置和结果分析
- 数据集
- 节点分类任务
- 消息传递方式比较
- 运行效率
- 总结
- 关键点
- 创新点
- 启发点
- 代码复现
- train.py
- util.py
- model.py
- layer.py
- 作业
前言
本课程来自深度之眼,部分截图来自课程视频。
文章标题:Semi-Supervised Classification with Graph Convolutional Networks
图卷积神经网络的半监督分类(GCN)
作者:Thomas N.Kipf,Max Welling
单位:University of Amsterdam
发表会议及时间:ICLR 2017
公式输入请参考:在线Latex公式
前期知识基础要求
概率论:了解基本的概率论知识,掌握条件概率的概念
图算法:图的基本算法,算法时间复杂度分析
(重点)图频域分析:图的拉普拉斯矩阵、傅里叶变换、图的频域变换、卷积、切比雪夫近似
深度学习:了解SGD等基本原理
论文结构
- Abstract:提出本文将卷积操作应用到图上,通过图频域的近似分析来建模,学习图的局部结构和节点特征。
- Introduction:介绍图上节点分类的半监督问题,通过神经网络学习节点的表达,定义了半监督loss function。提出了图上的神经网络信息前向传播规则,并将其与图频域分析联合起来。
- Fast Approximate Convolutions On Graphs:图的神经网络信息前向传播规则,图频域分析(重点)。
- Semi-Supervised Node Classification:提出一个两层的GCN模型,并设计了一个半监督的loss function。
- Related Work:总结了DeepWalk、Node2vec、LINE等算法,GGNN等应用RNN、卷积在图上的算法。
- Experiments:实验探究模型有效性:节点分类、信息传播、训练时间。(Cora数据集)
- Discussion:讨论GCN相比其他baselines模型的优势,讨论未来发展方向。
- Conclusion:总结提出的GCN模型,基于图频域分析的一阶近似,使用图的结构以及节点特征通过半监督学习,实验证明了模型的有效性。
学习目标

研究背景
直接上图,具体讲解可以参考上一篇笔记

消息传递机制(略,详见上一篇笔记)
前面几篇基于随机游走的论文在获取节点的embedding过程中只考虑了图结构的信息,而节点的特征是在后期加入的,特征并没有经过模型进行抽取或变化;关于6.7.8篇论文除了考虑图本身结构的信息之外,还加入了节点的特征进行计算,因此可以直接完成端到端的任务。


这里面Graph Pooling就相当于GraphSAGE,然后r-GCN是GCN在知识图谱的结合。
研究意义
·图卷积神经网络最常用的几个模型之一(GCN,GAT,GraphSAGE)
·将卷积算法直接用于处理图结构数据,频域分析与消息传播公式
·图频域卷积的局部一阶近似,单层的GCN处理图中一阶邻居的信息,K层GCN处理K阶邻居
·卷积的参数共享,对于每个节点参数是共享的
·图神经网络的最重要模型之一
泛读
摘要
1.本文提出了一种基于图的结构数据的半监督学习框架,该方法可直接在图上进行卷积操作。
2.卷积核的设计是通过图频域分析的局部一阶逼近的计算。
3.本文的模型运行效率高,通过图的局部结构和节点特征来获得节点的向量化表示。
4.大量实验证明了本文方法的有效性。
论文标题
- Introduction
- Fast Approximate Convolutions On Graphs
2.1 Spectral graph convolutions
2.2 Layer-wise Linear Model - Semi-Supervised Node Classification
3.1 Example
3.2 Implementation - Related Work
4.1 Graph-based Semi-supervised Learning
4.2 Neural Networks On Graphs - Experiments
5.1 Datasets
5.2 Experimental Set-up
5.3 Baselines - Results
6.1 Semi-supervised Node Classification
6.2 Evaluation Of Propagation Model
6.3 Training Time Per Epoch - Discussion
7.1 Semi-supervised Model
7.2 Limitations And Future Work - Conclusion
精读

模型总览

Main idea:pass messages between pairs of nodes & agglomerate. 具体公式为:
H l + 1 = σ ( D ~ − 1 2 A ~ D ~ − 1 2 H l Θ l ) (1) \text{H}^{l+1}=\sigma\left ( \tilde D^{-\frac{1}{2}}\tilde A\tilde D^{-\frac{1}{2}}H^l\Theta ^l\right )\tag1 Hl+1=σ(D~−21A~D~−21HlΘl)(1)
这里的两个 D ~ − 1 2 \tilde D^{-\frac{1}{2}} D~−21实际上相当于 D ~ − 1 \tilde D^{-1} D~−1(因为D是对角矩阵), A ~ \tilde A A~相当于A+I,也就是邻居加上自己本身的信息(I就是对角线都为1的单位阵), H l H^l Hl实际上就是节点的特征矩阵,如果有N个节点,每个节点特征是d维,这个矩阵大小就是N×d,AH如果拿出来看,H的第一列就是特征的第一个维度,上面不为0的项就所有当前节点的邻居节点的特征,AH就得到邻居特征的汇聚效果(由于加了I,这里当然有自己本身的信息)。最后的 Θ \Theta Θ是我们模型要训练的参数。以上是从空域spatial的角度来理解GCN的,其实前面都有学过,以上讲的一层GCN的操作,如果有多层:
Stacking multiple layers like standard CNNs:
这里的输入是邻接矩阵和特征矩阵X,最后得到的结果要和label进行交叉熵。

对于GCN的进一步理解如下:Fusing topology and features in the way of smoothing features with the assistance of topology. 就是摘要里面提到的既考虑了图结构信息,又考虑了节点特征信息。

上面的公式1可以拆解如上图所示,第一项里面的三个东西都是N×N的,所以结果还是N×N的(之前的node2vec等随机游走算法都只利用这部分的信息),第一项乘的第二项就是节点的特征融合进来,最后的结果是N×d维的(如图所示可以理解为Feature-driven的模型),公式1中最后乘的 Θ \Theta Θ相当于对特征矩阵进行投影变换可以把d维变成d’维。
网上例子
假设有这么一个图:

然后我们要根据公式1进行计算,先写出图的邻接矩阵:
A = [ 0 1 0 0 0 0 1 1 0 1 0 0 1 0 1 0 ] A=\begin{bmatrix} 0 & 1& 0 & 0\\ 0 & 0&1 &1 \\ 0 & 1 &0 &0 \\ 1 & 0 & 1 & 0 \end{bmatrix} A=⎣⎢⎢⎡0001101001010100⎦⎥⎥⎤
然后加上节点本身的信息I(就是对角线为1的单位证):
A ~ = A + I = [ 1 1 0 0 0 1 1 1 0 1 1 0 1 0 1 1 ] \tilde A=A+I=\begin{bmatrix} 1 & 1& 0 & 0\\ 0 & 1&1 &1 \\ 0 & 1 &1 &0 \\ 1 & 0 & 1 & 1 \end{bmatrix} A~=A+I=⎣⎢⎢⎡1001111001110101⎦⎥⎥⎤
然后图的度矩阵为:
D ~ = [ 2 0 0 0 0 3 0 0 0 0 2 0 0 0 0 3 ] \tilde D=\begin{bmatrix} 2 & 0& 0 & 0\\ 0 & 3&0 &0 \\ 0 & 0 &2 &0 \\ 0 & 0 & 0 & 3 \end{bmatrix} D~=⎣⎢⎢⎡2000030000200003⎦⎥⎥⎤
然后两个 D ~ − 1 2 \tilde D^{-\frac{1}{2}} D~−21实际上相当于 D ~ − 1 \tilde D^{-1} D~−1:
D ~ − 1 = [ 1 2 0 0 0 0 1 3 0 0 0 0 1 2 0 0 0 0 1 3 ] \tilde D^{-1}=\begin{bmatrix} \cfrac{1}{2} & 0& 0 & 0\\ 0 & \cfrac{1}{3}&0 &0 \\ 0 & 0 &\cfrac{1}{2} &0 \\ 0 & 0 & 0 & \cfrac{1}{3} \end{bmatrix} D~−1=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡21000031000021000031⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤
然后算:
D ~ − 1 ⋅ A ~ = [ 1 2 0 0 0 0 1 3 0 0 0 0 1 2 0 0 0 0 1 3 ] [ 1 1 0 0 0 1 1 1 0 1 1 0 1 0 1 1 ] = [ 1 2 1 2 0 0 0 1 3 1 3 1 3 0 1 2 1 2 0 1 3 0 1 3 1 3 ] \tilde D^{-1}\cdot \tilde A=\begin{bmatrix} \cfrac{1}{2} & 0& 0 & 0\\ 0 & \cfrac{1}{3}&0 &0 \\ 0 & 0 &\cfrac{1}{2} &0 \\ 0 & 0 & 0 & \cfrac{1}{3} \end{bmatrix}\begin{bmatrix} 1 & 1& 0 & 0\\ 0 & 1&1 &1 \\ 0 & 1 &1 &0 \\ 1 & 0 & 1 & 1 \end{bmatrix}=\begin{bmatrix} \cfrac{1}{2} & \cfrac{1}{2}& 0 & 0\\ 0 & \cfrac{1}{3}&\cfrac{1}{3} &\cfrac{1}{3} \\ 0 & \cfrac{1}{2}&\cfrac{1}{2} &0 \\ \cfrac{1}{3} & 0 & \cfrac{1}{3} & \cfrac{1}{3} \end{bmatrix} D~−1⋅A~=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡21000031000021000031⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎡1001111001110101⎦⎥⎥⎤=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡21003121312100312131031031⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤
可以看到每行的和为1,达到了一个normalization的效果。
假设图中4个节点的特征维度d=2,则有特征矩阵:
H = [ 0 0 1 − 1 2 − 2 3 − 3 ] H=\begin{bmatrix} 0 & 0\\ 1 &-1 \\ 2 &-2 \\ 3 & -3 \end{bmatrix} H=⎣⎢⎢⎡01230−1−2−3⎦⎥⎥⎤
最后可以计算出结果(AB两个矩阵的乘积的第m行第n列的元素等于矩阵A的第m行的元素与矩阵B的第n列对应元素乘积之和。):
D ~ − 1 ⋅ A ~ ⋅ H = [ 1 2 1 2 0 0 0 1 3 1 3 1 3 0 1 2 1 2 0 1 3 0 1 3 1 3 ] [ 0 0 1 − 1 2 − 2 3 − 3 ] = [ 1 2 − 1 2 2 − 2 3 2 − 3 2 5 3 − 5 3 ] \tilde D^{-1}\cdot \tilde A\cdot H=\begin{bmatrix} \cfrac{1}{2} & \cfrac{1}{2}& 0 & 0\\ 0 & \cfrac{1}{3}&\cfrac{1}{3} &\cfrac{1}{3} \\ 0 & \cfrac{1}{2}&\cfrac{1}{2} &0 \\ \cfrac{1}{3} & 0 & \cfrac{1}{3} & \cfrac{1}{3} \end{bmatrix}\begin{bmatrix} 0 & 0\\ 1 &-1 \\ 2 &-2 \\ 3 & -3 \end{bmatrix}=\begin{bmatrix} \cfrac{1}{2} & -\cfrac{1}{2}\\ 2 &-2 \\ \cfrac{3}{2} &-\cfrac{3}{2} \\ \cfrac{5}{3} & -\cfrac{5}{3} \end{bmatrix} D~−1⋅A~⋅H=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡21003121312100312131031031⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎡01230−1−2−3⎦⎥⎥⎤=⎣⎢⎢⎢⎢⎢⎢⎢⎡2122335−21−2−23−35⎦⎥⎥⎥⎥⎥⎥⎥⎤
原文例子
原文3.1节也给出了一个例子,一层GCN用的公式为:
A ^ = D ~ − 1 2 A ~ D ~ − 1 2 \hat A= \tilde D^{-\frac{1}{2}}\tilde A\tilde D^{-\frac{1}{2}} A^=D~−21A~D~−21
然后要乘上特征X和第一层参数 W ( 0 ) W^{(0)} W(0)然后经过ReLU非线性变换,然后经过第二层(第二层的参数是 W ( 1 ) W^{(1)} W(1)),然后接softmax,如果是Cora数据集应该是7分类:
Z = f ( X , A ) = s o f t m a x ( A ^ R e L U ( A ^ X W ( 0 ) ) W ( 1 ) ) (2) Z=f(X,A)=softmax(\hat AReLU(\hat AXW^{(0)})W^{(1)})\tag2 Z=f(X,A)=softmax(A^ReLU(A^XW(0))W(1))(2)
公式2中,第一层的计算为: R e L U ( A ^ X W ( 0 ) ) ReLU(\hat AXW^{(0)}) ReLU(A^XW(0))
第一层得到输出结果相当于第二层的输入中的新的特征 X ′ X' X′
因此第二层相当于: s o f t m a x ( A ^ X ′ W ( 1 ) ) softmax(\hat AX'W^{(1)}) softmax(A^X′W(1))
最后得到的Z就是节点的embedding。
所以整个套娃操作就是按照AXW的套路走的。
最后的交叉熵损失函数为:
L = − ∑ l ∈ Y L ∑ f = 1 F Y l f ln Z l f L=-\sum_{l\in \texttt{Y}_{L}}\sum_{f=1}^FY_{lf}\ln Z_{lf} L=−l∈YL∑f=1∑FYlflnZlf
这里最外面的求和下标代表半监督学习,只取了有label的部分点进行计算, Y l f Y_{lf} Ylf则是代表ground truth,是一个独热编码,第二个求和代表的是softmax操作。

看图加深理解,中间通过两层GCN后输入是C维的,输出是F维的embedding是Z,只有 Z 1 Z_1 Z1和 Z 4 Z_4 Z4有标签,只用这两个来计算交叉熵loss
频域和空域Spatial vs Spectral
Two major approaches to build Graph CNNs
- Spatial Domain: Perform convolution in spatial domain similar to images(euclidean data) with shareable weight parameters.
· Spatial construction is usually more efficient but less principled.
· Spatial construction is usually more efficient but less principled. - Spectral Domain: Convert Graph data to spectral domain data by using the eigenvectors of laplacian operator on the graph data and perform learning on the transformed data.
· Spectral construction is more principled but usually slow. Computing Laplacian eigenvectors for large scale data couid be painful.
· Research tries to bridge the gap.(This paper GCN!)
细节一:R-GCN模型结构
这个是用在知识图谱的一个模型,知识图谱一般都是异质图,可以和之前学过的metapath联系起来看一下。
以点 i i i在 l + 1 l+1 l+1层如何从第 l l l层计算过来的为例。
l i ( l + 1 ) = σ ( ∑ r ∈ R ∑ j ∈ N i r 1 c i , r W r ( l ) h j ( l ) + W 0 ( l ) h j ( l ) ) (3) l_i^{(l+1)}=\sigma\left(\sum_{r\in R}\sum_{j\in N_i^r}\cfrac{1}{c_{i,r}}W_r^{(l)}h_j^{(l)}+W_0^{(l)}h_j^{(l)}\right)\tag3 li(l+1)=σ⎝⎛r∈R∑j∈Nir∑ci,r1Wr(l)hj(l)+W0(l)hj(l)⎠⎞(3)
上式3中 W 0 ( l ) W_0^{(l)} W0(l)对应是节点自身的参数, W r ( l ) W_r^{(l)} Wr(l)是邻居节点的参数
N i r N_i^r Nir表示点 i i i的所有邻居节点的集合,然后r代表邻居节点和当前节点的关系的分类(相当于边的分类),归一化项也体现了,按节点以及邻居类型进行归一化。
可以看到,边的类型越多(邻居节点的类型越多),那么每一层的参数也就越多,例如,我们的邻居类型有10种,那么每一层都有10个 W ( l ) W^{(l)} W(l)参数,所以这里参数还加了下标r。
下面看图,图中的rel表示关系后面的数字代表关系的种类,可以看到对于关系1(rel_1)而言,有六个邻居节点,这里考虑的是有向图,因此还把这六个邻居分成了in和out的两类,下面考虑的关系N也是一样。最后还要加上节点本身的信息(红色那个self-loop)。
原文对这个公式的说明:
where N i r N^r_i Nir denotes the set of neighbor indices of node i i i under relation r ∈ R r ∈ R r∈R. c i , r c_{i,r} ci,r is a problem-specific normalization constant that can either be learned or chosen in advance (such as c i , r = ∣ N i r ∣ c_{i,r} = |N^r_i| ci,r=∣Nir∣).

可以看下原文的2.1节
原文在这里:Modeling Relational Data with Graph Convolutional Networks
细节二:拉普拉斯矩阵Laplacian matrix
拉普拉斯算子
参考文献:https://zhuanlan.zhihu.com/p/85287578
拉普拉斯算子(Laplace Operator)是 n n n维欧几里得空间中的一个二阶微分算子,定义为梯度( ▽ f \triangledown f ▽f)的散度( ▽ ⋅ \triangledown\cdot ▽⋅)。
Δ f = ▽ 2 f = ▽ ⋅ ▽ f = d i v ( g r a d f ) \Delta f=\triangledown^2f=\triangledown\cdot\triangledown f=div(gradf) Δf=▽2f=▽⋅▽f=div(gradf)
借用参考文献中的公式:

离散函数的导数可以看做是连续函数的求导(高数中的求极限操作)推导出来的结果。
以上是一维的散度的写法,下面看二维散度的写法,可以看到其中对x求二阶偏导的时候,y是不动的,然后例用上面的一维散度的公式进行展开。

相当于计算红色点与周围四个方向的蓝色点的差的累加和,回过头看一维的拉普拉斯算子就是计算x与其前后点也就是x+1和x-1的差的和
拉普拉斯矩阵
对于图的拉普拉斯算子:
Δ f = ∑ j ∈ N i ( f i − f j ) \Delta f=\sum_{j\in N_i}(f_i-f_j) Δf=j∈Ni∑(fi−fj)
相当于求节点i与所有邻居节点之间的差,然后求和。
如果考虑边 E i j E_{ij} Eij的权重 W i j W_{ij} Wij的时候:
Δ f i = ∑ j ∈ N i W i j ( f i − f j ) \Delta f_i=\sum_{j\in N_i}W_{ij}(f_i-f_j) Δfi=j∈Ni∑Wij(fi−fj)
当 W i j = 0 W_{ij}=0 Wij=0时,表示节点i,j不相邻,可以将非邻居节点的权重剔除,变成:
Δ f i = ∑ j ∈ N w i j ( f i − f j ) \Delta f_i=\sum_{j\in N}w_{ij}(f_i-f_j) Δfi=j∈N∑wij(fi−fj)
展开括号:
= ∑ j ∈ N w i j f i − ∑ j ∈ N w i j f j =\sum_{j\in N}w_{ij}f_i-\sum_{j\in N}w_{ij}f_j =j∈N∑wijfi−j∈N∑wijfj
第一项中 f i f_i fi和求和符合无关,可以只算 ∑ j ∈ N w i j = d i \sum_{j\in N}w_{ij}=d_i ∑j∈Nwij=di,这个就是节点i的度
第二项可以写成向量内积的形式, w i : = ( w i 1 , ⋯ , w i N ) w_{i:}=(w_{i1},\cdots,w_{iN}) wi:=(wi1,⋯,wiN)是N维行向量;
f = ( f 1 ⋮ f N ) f=\begin{pmatrix} f_1\\ \vdots\\ f_N\end{pmatrix} f=⎝⎜⎛f1⋮fN⎠⎟⎞是N维列向量;
那么图中某个个节点i的拉普拉斯算子就写成了:
Δ f = d i f i − w i : f \Delta f=d_if_i-w_{i:}f Δf=difi−wi:f
对于图中的N个节点:
Δ f = ( Δ f 1 ⋮ Δ f N ) = ( d 1 f 1 − w 1 : f ⋮ d N f N − w N : f ) \Delta f=\begin{pmatrix} \Delta f_1\\ \vdots\\ \Delta f_N\end{pmatrix}=\begin{pmatrix} d_1f_1-w_{1:}f\\ \vdots\\ d_Nf_N-w_{N:}f\end{pmatrix} Δf=⎝⎜⎛Δf1⋮ΔfN⎠⎟⎞=⎝⎜⎛d1f1−w1:f⋮dNfN−wN:f⎠⎟⎞
可以写成一个N×N的矩阵
= ( d 1 ⋯ 0 ⋮ ⋱ ⋮ 0 ⋯ d N ) f − ( w 1 : ⋮ w N : ) f =\begin{pmatrix} d_1&\cdots&0\\ \vdots&\ddots&\vdots\\ 0&\cdots&d_N\end{pmatrix}f-\begin{pmatrix} w_{1:}\\ \vdots\\ w_{N:}\end{pmatrix}f =⎝⎜⎛d1⋮0⋯⋱⋯0⋮dN⎠⎟⎞f−⎝⎜⎛w1:⋮wN:⎠⎟⎞f
可以写成:
d i a g ( d i ) f − W f = ( D − W ) f = L f diag(d_i)f-Wf=(D-W)f=Lf diag(di)f−Wf=(D−W)f=Lf
对于图的拉普拉斯算子的第i项可以写成:
( L f ) ( i ) = ∑ j ∈ N i W i , j [ f ( i ) − f ( j ) ] (Lf)(i)=\sum_{j\in N_i}W_{i,j}[f(i)-f(j)] (Lf)(i)=j∈Ni∑Wi,j[f(i)−f(j)]
它的意思就是点i和其所属邻居的差的求和。上式也称为图的拉普拉斯矩阵。
下面来看图的拉普拉斯矩阵的其他定义方式:
D:diagonal matrix whose i t h i^{th} ith diagnal element d i d_i di is equal to the sum of the weights of all the edges incident to v i v_i vi
上面定义的拉普拉斯矩阵可以叫:combinatorial graph Laplacian/ non-normalized graph Laplacian:
L = D − W (4) L=D-W\tag4 L=D−W(4)
下面一种是和GCN中的公式很像的叫:normalized graph Laplacian/ symmetric normalized Laplacian:
L ~ = D − 1 2 L D − 1 2 = I N − D − 1 2 W D − 1 2 (5) \tilde L=D^{-\frac{1}{2}}LD^{-\frac{1}{2}}=I_N-D^{-\frac{1}{2}}WD^{-\frac{1}{2}}\tag5 L~=D−21LD−21=IN−D−21WD−21(5)
上式最后那里是把上上个公式的L带到里面并展开的结果。上式中 I N I_N IN是N×N的identity matrix单位矩阵(对角线为1,其他位置都是0的那种矩阵)。
还有一种叫:asymmetric graph Laplacian:
L a = I N − P (6) L_a=I_N-P\tag6 La=IN−P(6)
其中 P = D − 1 W P=D^{-1}W P=D−1W是随机游走矩阵,其每个元素 P i , j P_{i,j} Pi,j表示图中顶点 v i v_i vi到 v j v_j vj游走(用马尔科夫方法)的概率。
说明:第5和第6分别处理的对称矩阵和非对称矩阵的情况。
下面看一下拉普拉斯矩阵的公式4的每个位置取值,这里我们假设所有边的权重都是1,那么就意味在W就是邻接矩阵,有边相连的位置就是1,否则就是0。那么拉普拉斯矩阵某个位置的取值为:
L ( u , v ) = { d v if u = v ( d v is the degree of node v ) − 1 if u ≠ v , ( u , v ) ∈ E 0 otherwise (7) L(u,v)=\begin{cases} & d_v\quad\text{if } u=v(d_v\text{ is the degree of node }v) \\ & -1\space\space\text{ if } u\neq v,(u,v)\in E \\ &0\quad\space\text{ otherwise } \end{cases}\tag7 L(u,v)=⎩⎪⎨⎪⎧dvif u=v(dv is the degree of node v)−1 if u=v,(u,v)∈E0 otherwise (7)
第一种情况,当 u = v u=v u=v,这个时候就是指的同一个节点的情况,那么邻接矩阵这个位置为0,因此只有 d v d_v dv这项;
第二种情况,当 u ≠ v , ( u , v ) ∈ E u\neq v,(u,v)\in E u=v,(u,v)∈E,这个时候表明u和v是两个不同节点,而且二者有边相连,那么这个时候其邻接矩阵的这个位置值为1,但是在度矩阵D中,肯定是不在对角线上,因此D这项为0(度矩阵只有对角线上有值,该值为该节点的度),因此0-1=-1,最后结果就是-1;
第三种情况,u和v没有边相连,邻接矩阵位置上值为0,也不在D的对角线上,D也为0,最后结果就是0.
对于公式5,拉普拉斯矩阵的取值为:
L ~ ( u , v ) = { 1 if u = v , d v ≠ 0 ( d v is the degree of node v ) − 1 d u d v if u ≠ v , ( u , v ) ∈ E 0 otherwise (8) \tilde L(u,v)=\begin{cases} & 1\quad\text{if } u=v,d_v\ne0 \space (d_v\text{ is the degree of node }v) \\ & -\cfrac{1}{\sqrt{d_ud_v}}\space\space\text{ if } u\neq v,(u,v)\in E \\ &0\quad\space\text{ otherwise } \end{cases}\tag8 L~(u,v)=⎩⎪⎪⎪⎨⎪⎪⎪⎧1if u=v,dv=0 (dv is the degree of node v)−dudv1 if u=v,(u,v)∈E0 otherwise (8)
公式5可以理解为对公式4除以一个 d v d_v dv进行归一化,因此就是把上式7每种情况除一个 d v d_v dv就ok了。
拉普拉斯矩阵的性质
一般化的拉普拉斯矩阵(generalized graph Laplacians):归一化normalized和非归一化non-normalized的拉普拉斯矩阵都可以统称为generalized graph Laplacians.
1.对于generalized graph Laplacians,如果图中两个顶点有边相连,则矩阵对应位置为负值(情况二),如果两个顶点没有边相连,则矩阵对应位置为0(情况三),如果是对角线(同一个节点),那么取值可以是任意实数(情况一)
2.对于 L L L和 L ~ \tilde L L~都有相同的特征值,这个很重要,要对矩阵进行特征分解才能得到图频域的结果。
3.图的拉普拉斯矩阵还可以叫:admittance matrix, discrete Laplacian or Kirchohoff matrix.
4.对于某个图的拉普拉斯矩阵要使用归一化normalized或非归一化non-normalized的形态,并没有明确规定。
拉普拉斯矩阵例子
An example of non-normalized L L L with W = A W=A W=A, L = D − A L=D-A L=D−A:

度矩阵:
D = ( 2 0 0 0 0 0 0 3 0 0 0 0 0 0 2 0 0 0 0 0 0 3 0 0 0 0 0 0 3 0 0 0 0 0 0 1 ) D=\begin{pmatrix} 2 & 0& 0&0 & 0 & 0\\ 0 & 3& 0&0 & 0 & 0 \\ 0 & 0& 2&0 & 0 & 0 \\ 0 & 0& 0&3 & 0 & 0 \\ 0 & 0& 0&0 & 3 & 0\\ 0 & 0& 0&0 & 0 & 1 \end{pmatrix} D=⎝⎜⎜⎜⎜⎜⎜⎛200000030000002000000300000030000001⎠⎟⎟⎟⎟⎟⎟⎞
邻接矩阵:
A = ( 0 1 0 0 1 0 1 0 1 0 1 0 0 1 0 1 0 0 0 0 1 0 1 1 1 1 0 1 0 0 0 0 0 1 0 0 ) A=\begin{pmatrix} 0 & 1& 0&0 & 1 & 0\\ 1 & 0& 1&0 & 1 & 0 \\ 0 & 1& 0&1 & 0 & 0 \\ 0 & 0& 1&0 & 1 & 1 \\ 1 & 1& 0&1 & 0 & 0\\ 0 & 0& 0&1 & 0 & 0 \end{pmatrix} A=⎝⎜⎜⎜⎜⎜⎜⎛010010101010010100001011110100000100⎠⎟⎟⎟⎟⎟⎟⎞
拉普拉斯矩阵(没有归一化的):
L = D − A ( 2 − 1 0 0 − 1 0 − 1 3 − 1 0 − 1 0 0 − 1 2 − 1 0 0 0 0 − 1 3 − 1 − 1 − 1 − 1 0 − 1 3 0 0 0 0 − 1 0 − 1 ) L=D-A\left( \begin{array}{rrrrrr} 2 & -1& 0&0 & -1 & 0\\ -1 & 3& -1&0 & -1 & 0 \\ 0 & -1& 2&-1 & 0 & 0 \\ 0 & 0& -1&3 & -1 & -1 \\ -1 & -1& 0&-1 & 3 & 0\\ 0 & 0& 0&-1 & 0 & -1 \end{array} \right) L=D−A⎝⎜⎜⎜⎜⎜⎜⎛2−100−10−13−10−100−12−10000−13−1−1−1−10−130000−10−1⎠⎟⎟⎟⎟⎟⎟⎞
细节三:图的频域变换
图的拉普拉斯矩阵性质:
(normalized/non-normalized)graph Laplacian( L L L,or L ~ \tilde L L~)is a real symmetric matrix(看例子就知道,拉普拉斯矩阵是一个对称矩阵), with a complete set of orthonormal eigenvectors(并且有一组正交特征向量), which we denote by { u l } \{u_l\} {ul} where l = 0 , 1 , ⋯ , N − 1 l=0,1,\cdots,N-1 l=0,1,⋯,N−1.
其中 { u l } \{u_l\} {ul}对应一个非负实数特征值 { λ l } \{\lambda_l\} {λl}
因此,根据线性代数的性质可知:
L u l = λ l u l (9) Lu_l=\lambda_lu_l\tag9 Lul=λlul(9)
图有多少个连通分量则有多少个特征值等于0。对于一个连通图,则只有一个特征值为0。
因此对于一个连通图,所有的特征值可以做如下排列:
0 = λ 0 ≤ λ 1 ⋯ ≤ λ N − 1 0=\lambda_0\leq\lambda_1\cdots\leq\lambda_{N-1} 0=λ0≤λ1⋯≤λN−1
整个特征值可以表示为:
σ ( L ) = { λ 0 , λ 1 , ⋯ , λ N − 1 } \sigma(L)=\{\lambda_0,\lambda_1,\cdots,\lambda_{N-1}\} σ(L)={λ0,λ1,⋯,λN−1}
拉普拉斯矩阵的特征分解也可以写成矩阵的形式:
L = U ( λ 0 0 ⋯ 0 0 λ 1 ⋯ 0 ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ λ N − 1 ) U − 1 = U ( λ 0 0 ⋯ 0 0 λ 1 ⋯ 0 ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ λ N − 1 ) U T L=U\left( \begin{array}{cccc} \lambda_0 & 0& \cdots&0 \\ 0 & \lambda_1& \cdots&0 \\ \vdots & \vdots& \ddots&\vdots \\ 0 & 0& \cdots&\lambda_{N-1} \end{array} \right)U^{-1}=U\left( \begin{array}{cccc} \lambda_0 & 0& \cdots&0 \\ 0 & \lambda_1& \cdots&0 \\ \vdots & \vdots& \ddots&\vdots \\ 0 & 0& \cdots&\lambda_{N-1} \end{array} \right)U^{T} L=U⎝⎜⎜⎜⎛λ00⋮00λ1⋮0⋯⋯⋱⋯00⋮λN−1⎠⎟⎟⎟⎞U−1=U⎝⎜⎜⎜⎛λ00⋮00λ1⋮0⋯⋯⋱⋯00⋮λN−1⎠⎟⎟⎟⎞UT
上式中 λ i \lambda_i λi是特征值, U = ( u 0 ⃗ , u 1 ⃗ , ⋯ , u ⃗ N − 1 ) U=(\vec{u_0},\vec{u_1},\cdots,\vec{u}_{N-1}) U=(u0,u1,⋯,uN−1)(这里下标是从0开始,后面一小节下标从1开始,总的维度都是N), u i ⃗ \vec{u_i} ui是列向量,并且是单位特征向量, U − 1 U^{-1} U−1可写成 U T U^{T} UT(因为 U U T = I N UU^T=I_N UUT=IN,二者是正交向量)。
如果对输入信号 f i n f_{in} fin做拉普拉斯变化,就是:
f o u t = h ^ ( L ) f i n f_{out}=\hat h(L)f_{in} fout=h^(L)fin
其中
h ^ ( L ) = U ( h ^ ( λ 0 ) 0 ⋯ 0 0 h ^ ( λ 1 ) ⋯ 0 ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ h ^ ( λ N − 1 ) ) U T \hat h(L)=U\left( \begin{array}{cccc} \hat h(\lambda_0) & 0& \cdots&0 \\ 0 & \hat h(\lambda_1)& \cdots&0 \\ \vdots & \vdots& \ddots&\vdots \\ 0 & 0& \cdots&\hat h(\lambda_{N-1}) \end{array} \right)U^{T} h^(L)=U⎝⎜⎜⎜⎛h^(λ0)0⋮00h^(λ1)⋮0⋯⋯⋱⋯00⋮h^(λN−1)⎠⎟⎟⎟⎞UT
关于特征向量看这里、矩阵分解可以看这里。
图的频域变换Graph spectral
将图的拉普拉斯变换和图的频域变换做一个类比。
傅里叶变换(将信号从时域变换到频域):
X ( f ) = ∫ − ∞ ∞ x ( t ) e − j 2 π f t d t X(f)=\int_{-\infty}^\infty x(t)e^{-j2\pi ft}dt X(f)=∫−∞∞x(t)e−j2πftdt
反向傅里叶变换:
x ( t ) = ∫ − ∞ ∞ X ( f ) e j 2 π f t d f x(t)=\int_{-\infty}^\infty X(f)e^{j2\pi ft}df x(t)=∫−∞∞X(f)ej2πftdf
总体可以写成:
x ( t ) ⇌ X ( f ) x(t)\rightleftharpoons X(f) x(t)⇌X(f)
其中 2 π f = ω 2\pi f=\omega 2πf=ω
拉普拉斯算子可以理解成一种变换
上面我们推出来的公式9可以写成:
A v = λ v (10) Av=\lambda v\tag{10} Av=λv(10)
将拉普拉斯算子与傅里叶变换中的e那项相乘(这一步结果可以参考拉普拉斯算子的定义,就是求散度,二阶导数):
Δ e − i ω t = ∂ 2 ∂ t 2 e − i ω t \Delta e^{-i\omega t}=\cfrac{\partial^2 }{\partial t^2}e^{-i\omega t} Δe−iωt=∂t2∂2e−iωt
对上面的复合函数求导得:
Δ e − i ω t = − ω 2 e − i ω t (11) \Delta e^{-i\omega t}=-\omega^2e^{-i\omega t}\tag{11} Δe−iωt=−ω2e−iωt(11)
对比公式10公式11中可以看到:
10中的特征向量 v v v相当于11中的 e − i ω t e^{-i\omega t} e−iωt;
10中的拉普拉斯矩阵 A A A相当于11中的 Δ \Delta Δ;
10中的特征值 λ \lambda λ相当于11中的 ω 2 \omega^2 ω2。
因此,图信号到图频域的变换就可以写为:
F ( λ l ) = f ^ ( λ l ) = ∑ i = 1 N f ( i ) u l ∗ ( i ) (12) F(\lambda_l)=\hat f(\lambda_l)=\sum_{i=1}^Nf(i)u_l^*(i)\tag{12} F(λl)=f^(λl)=i=1∑Nf(i)ul∗(i)(12)
反过来:
f ( i ) = ∑ l = 1 N f ^ ( λ l ) u l ( i ) (13) f(i)=\sum_{l=1}^N\hat f(\lambda_l)u_l(i)\tag{13} f(i)=l=1∑Nf^(λl)ul(i)(13)
公式12可以写成矩阵的形式:
( f ^ ( λ 1 ) f ^ ( λ 2 ) ⋮ f ^ ( λ N ) ) = ( u 1 ( 1 ) u 1 ( 2 ) ⋯ u 1 ( N ) u 2 ( 1 ) u 2 ( 2 ) ⋯ u 2 ( N ) ⋮ ⋮ ⋱ ⋮ u N ( 1 ) u N ( 2 ) ⋯ u N ( N ) ) ( f ( 1 ) f ( 2 ) ⋮ f ( N ) ) \begin{pmatrix} \hat f(\lambda_1)\\ \hat f(\lambda_2)\\ \vdots\\ \hat f(\lambda_N)\end{pmatrix}=\begin{pmatrix} u_1(1) & u_1(2) & \cdots &u_1(N) \\ u_2(1) & u_2(2)& \cdots &u_2(N)\\ \vdots & \vdots & \ddots &\vdots \\ u_N(1) & u_N(2) & \cdots &u_N(N) \end{pmatrix}\begin{pmatrix} f(1)\\ f(2)\\ \vdots\\ f(N)\end{pmatrix} ⎝⎜⎜⎜⎛f^(λ1)f^(λ2)⋮f^(λN)⎠⎟⎟⎟⎞=⎝⎜⎜⎜⎛u1(1)u2(1)⋮uN(1)u1(2)u2(2)⋮uN(2)⋯⋯⋱⋯u1(N)u2(N)⋮uN(N)⎠⎟⎟⎟⎞⎝⎜⎜⎜⎛f(1)f(2)⋮f(N)⎠⎟⎟⎟⎞
然后写成向量的形式:
f ^ = U T f \hat f=U^Tf f^=UTf
同理,公式13可以写成矩阵的形式:
( f ( 1 ) f ( 2 ) ⋮ f ( N ) ) = ( u 1 ( 1 ) u 1 ( 2 ) ⋯ u 1 ( N ) u 2 ( 1 ) u 2 ( 2 ) ⋯ u 2 ( N ) ⋮ ⋮ ⋱ ⋮ u N ( 1 ) u N ( 2 ) ⋯ u N ( N ) ) ( f ^ ( λ 1 ) f ^ ( λ 2 ) ⋮ f ^ ( λ N ) ) \begin{pmatrix} f(1)\\ f(2)\\ \vdots\\ f(N)\end{pmatrix}=\begin{pmatrix} u_1(1) & u_1(2) & \cdots &u_1(N) \\ u_2(1) & u_2(2)& \cdots &u_2(N)\\ \vdots & \vdots & \ddots &\vdots \\ u_N(1) & u_N(2) & \cdots &u_N(N) \end{pmatrix}\begin{pmatrix} \hat f(\lambda_1)\\ \hat f(\lambda_2)\\ \vdots\\ \hat f(\lambda_N)\end{pmatrix} ⎝⎜⎜⎜⎛f(1)f(2)⋮f(N)⎠⎟⎟⎟⎞=⎝⎜⎜⎜⎛u1(1)u2(1)⋮uN(1)u1(2)u2(2)⋮uN(2)⋯⋯⋱⋯u1(N)u2(N)⋮uN(N)⎠⎟⎟⎟⎞⎝⎜⎜⎜⎛f^(λ1)f^(λ2)⋮f^(λN)⎠⎟⎟⎟⎞
然后写成向量的形式:
f = U T f ^ f=U^T\hat f f=UTf^
图频域变换证明
通常图频域变换的公式写为:
( f ∗ h ) G = U ( ( U T h ) ⊙ ( U T f ) ) (14) (f*h)_G=U((U^Th)\odot (U^Tf))\tag{14} (f∗h)G=U((UTh)⊙(UTf))(14)
里面是两个图转频域的变化进行点乘,然后再转换回图。
下面证明公式14与下式等价
( f ∗ h ) G = U ( h ^ ( λ 1 ) ⋱ h ^ ( λ n ) ) U T f (15) (f*h)_G=U\begin{pmatrix} \hat h(\lambda_1)&&\\ &\ddots&\\ &&\hat h(\lambda_n)\\ \end{pmatrix}U^Tf\tag{15} (f∗h)G=U⎝⎛h^(λ1)⋱h^(λn)⎠⎞UTf(15)
我们将图信号记为一个列向量:
f = ( h ( 1 ) h ( 2 ) ⋮ h ( n ) ) f=\begin{pmatrix} h(1)\\ h(2)\\ \vdots\\ h(n)\end{pmatrix} f=⎝⎜⎜⎜⎛h(1)h(2)⋮h(n)⎠⎟⎟⎟⎞
另外一个图信号,实际上是图卷积的卷积核,可以记为:
h = ( h ( λ 1 ) h ( λ 2 ) ⋮ h ( λ n ) ) h=\begin{pmatrix} h(\lambda_1)\\ h(\lambda_2)\\ \vdots\\ h(\lambda_n)\end{pmatrix} h=⎝⎜⎜⎜⎛h(λ1)h(λ2)⋮h(λn)⎠⎟⎟⎟⎞
将上面两个信号通过下面两个式子进行变化,得到图频域信号:
f ^ ( λ l ) = ∑ i = 1 N f ( i ) u l ( i ) , h ^ ( λ l ) = ∑ i = 1 N h ( i ) u l ( i ) \hat f(\lambda_l)=\sum_{i=1}^Nf(i)u_l(i), \quad \hat h(\lambda_l)=\sum_{i=1}^Nh(i)u_l(i) f^(λl)=i=1∑Nf(i)ul(i),h^(λl)=i=1∑Nh(i)ul(i)
堆叠写成矩阵的形式:
f ^ = U T f , h ^ = U T h \hat f=U^Tf,\quad \hat h=U^Th f^=UTf,h^=UTh
最后频域信号可以写为:
f ^ = ( f ^ ( λ 1 ) f ^ ( λ 2 ) ⋮ f ^ ( λ n ) ) , h ^ = ( h ^ ( λ 1 ) h ^ ( λ 2 ) ⋮ h ^ ( λ n ) ) \hat f=\begin{pmatrix} \hat f(\lambda_1)\\ \hat f(\lambda_2)\\ \vdots\\ \hat f(\lambda_n)\end{pmatrix},\quad \hat h=\begin{pmatrix} \hat h(\lambda_1)\\ \hat h(\lambda_2)\\ \vdots\\ \hat h(\lambda_n)\end{pmatrix} f^=⎝⎜⎜⎜⎛f^(λ1)f^(λ2)⋮f^(λn)⎠⎟⎟⎟⎞,h^=⎝⎜⎜⎜⎛h^(λ1)h^(λ2)⋮h^(λn)⎠⎟⎟⎟⎞
比较公式14和15,右边第一项是U,要证明的就是后面部分要相等:
( h ^ ( λ 1 ) ⋱ h ^ ( λ n ) ) U T f = ( U T h ) ⊙ ( U T f ) \begin{pmatrix} \hat h(\lambda_1)&&\\ &\ddots&\\ &&\hat h(\lambda_n)\\ \end{pmatrix}U^Tf=(U^Th)\odot (U^Tf) ⎝⎛h^(λ1)⋱h^(λn)⎠⎞UTf=(UTh)⊙(UTf)
上式中左边的 U T f U^Tf UTf,实际上就是把 f f f转换为频域 f ^ \hat f f^,把上面求出的频域结果带过来,左边可以写为:
( h ^ ( λ 1 ) ⋱ h ^ ( λ n ) ) U T f = ( h ^ ( λ 1 ) ⋱ h ^ ( λ n ) ) f ^ = ( h ^ ( λ 1 ) ⋱ h ^ ( λ n ) ) ( f ^ ( λ 1 ) f ^ ( λ 2 ) ⋮ f ^ ( λ n ) ) (16) \begin{pmatrix} \hat h(\lambda_1)&&\\ &\ddots&\\ &&\hat h(\lambda_n)\\ \end{pmatrix}U^Tf=\begin{pmatrix} \hat h(\lambda_1)&&\\ &\ddots&\\ &&\hat h(\lambda_n)\\ \end{pmatrix}\hat f=\begin{pmatrix} \hat h(\lambda_1)&&\\ &\ddots&\\ &&\hat h(\lambda_n)\\ \end{pmatrix}\begin{pmatrix} \hat f(\lambda_1)\\ \hat f(\lambda_2)\\ \vdots\\ \hat f(\lambda_n)\end{pmatrix}\tag{16} ⎝⎛h^(λ1)⋱h^(λn)⎠⎞UTf=⎝⎛h^(λ1)⋱h^(λn)⎠⎞f^=⎝⎛h^(λ1)⋱h^(λn)⎠⎞⎝⎜⎜⎜⎛f^(λ1)f^(λ2)⋮f^(λn)⎠⎟⎟⎟⎞(16)
同理,右边也是将 f f f转换为频域 f ^ \hat f f^, h h h转换为频域 h ^ \hat h h^:
( U T h ) ⊙ ( U T f ) = h ^ ⊙ f ^ = ( h ^ ( λ 1 ) h ^ ( λ 2 ) ⋮ h ^ ( λ n ) ) ⊙ ( f ^ ( λ 1 ) f ^ ( λ 2 ) ⋮ f ^ ( λ n ) ) (17) (U^Th)\odot (U^Tf)=\hat h\odot \hat f=\begin{pmatrix} \hat h(\lambda_1)\\ \hat h(\lambda_2)\\ \vdots\\ \hat h(\lambda_n)\end{pmatrix}\odot \begin{pmatrix} \hat f(\lambda_1)\\ \hat f(\lambda_2)\\ \vdots\\ \hat f(\lambda_n)\end{pmatrix}\tag{17} (UTh)⊙(UTf)=h^⊙f^=⎝⎜⎜⎜⎛h^(λ1)h^(λ2)⋮h^(λn)⎠⎟⎟⎟⎞⊙⎝⎜⎜⎜⎛f^(λ1)f^(λ2)⋮f^(λn)⎠⎟⎟⎟⎞(17)
公式16的矩阵相乘与点乘结果是一样的,因为第一个矩阵除了对角线都是0。
小结
Starting from signal processing:
Recall that: The Laplacian is indeed diagonalized by the Fourier basis (the orthonormal eigenvectors) U = [ u 0 , u 1 , … , u N − 1 ] ∈ R N × N U=[u_0, u_1,…, u_{N-1}]\in R^{N\times N} U=[u0,u1,…,uN−1]∈RN×N.
拉普拉斯矩阵实际上就是傅里叶基(就是一组正交特征向量),上式中是拉普拉斯矩阵的N个特征向量
Let Λ = d i a g ( [ λ 0 , ⋯ , λ N − 1 ] ) \Lambda=diag([\lambda_0,\cdots,\lambda_{N-1}]) Λ=diag([λ0,⋯,λN−1]), then we have L = U Λ U T L=U\Lambda U^T L=UΛUT.
如果将特征值写成对角线矩阵,则拉普拉斯特征变化就可以写成上面的式子。
The graph Fourier transform of a signal x ∈ R N x\in R^N x∈RN is then defined as x ^ U T x ∈ R N \hat xU^Tx\in R^N x^UTx∈RN, with inverse x = U x ^ x=U\hat x x=Ux^. This transformation enableds the formation of fundamental operations. such as filtering, just as on Euclidean spaces.
图的频域变换和图的频域反变化如上面两个公式所示。
Recall that:
X ⊗ Y = F o u r i e r i n v e r s e ( F o u r i e r ( X ) ⊙ F o u r i e r ( Y ) ) X\otimes Y=Fourier_{inverse}(Fourier(X)\odot Fourier(Y)) X⊗Y=Fourierinverse(Fourier(X)⊙Fourier(Y))
就是公式14
Definition of convolutional operator:
( f ∗ h ) ∗ g = U ( ( U T h ) ⊙ ( U T f ) ) (f*h)_{*\mathfrak{g}}=U((U^Th)\odot (U^Tf)) (f∗h)∗g=U((UTh)⊙(UTf))
细节四:卷积核介绍
图卷积核初代目
这节通过几篇图卷积相关的论文来讲解图卷积核的演变过程。
Spectral Networks and Deep Locally Connected Networks on Graphs
早期的图卷积的论文,其思想是利用公式14(其中f是图的输入,h是卷积核,对这两货分别进行频域的变化后,做elementwise点乘,然后再逆变换回图信号。)
( f ∗ h ) G = U ( ( U T h ) ⊙ ( U T f ) ) (14) (f*h)_G=U((U^Th)\odot (U^Tf))\tag{14} (f∗h)G=U((UTh)⊙(UTf))(14)
写出计算图某个节点表征的公式:
y o u t p u t = σ ( U g θ ( Λ ) U T x ) (18) y_{output}=\sigma(Ug_{\theta}(\Lambda)U^Tx)\tag{18} youtput=σ(Ugθ(Λ)UTx)(18)
其中 g θ ( Λ ) g_{\theta}(\Lambda) gθ(Λ)就是公式15中的对角线矩阵,这里写成:
g θ ( Λ ) = ( θ 1 ⋱ θ n ) (19) g_{\theta}(\Lambda)=\begin{pmatrix} \theta_1&&\\ &\ddots&\\ &&\theta_n\\ \end{pmatrix}\tag{19} gθ(Λ)=⎝⎛θ1⋱θn⎠⎞(19)
由于公式18要计算特征向量 U U U,要对拉普拉斯矩阵进行分解,另外加上矩阵的乘法,计算复杂度比较高,公式18中x是节点的特征,整个公式中 θ \theta θ是要学习的参数,共有n个,整个过程针对所有节点没有利用邻居信息,没有localization。
Convolutional Neural Networks on Graphs with Fast Localized Spectral Filtering
这篇论文中用另外一种形式来表示公式18中的 g θ ( Λ ) g_{\theta}(\Lambda) gθ(Λ)
g θ ( Λ ) = ( ∑ j = 0 K − 1 α j λ 1 j ⋱ ∑ j = 0 K − 1 α j λ n j ) = ∑ j = 0 K − 1 α j Λ j (20) g_{\theta}(\Lambda)=\begin{pmatrix} \sum_{j=0}^{K-1}\alpha_j\lambda_1^j&&\\ &\ddots&\\ &&\sum_{j=0}^{K-1}\alpha_j\lambda_n^j\\ \end{pmatrix}=\sum_{j=0}^{K-1}\alpha_j\Lambda^j\tag{20} gθ(Λ)=⎝⎜⎛∑j=0K−1αjλ1j⋱∑j=0K−1αjλnj⎠⎟⎞=j=0∑K−1αjΛj(20)
将公式20的卷积核代入18,只看 U g θ ( Λ ) U T Ug_{\theta}(\Lambda)U^T Ugθ(Λ)UT这个部分:
U g θ ( Λ ) U T = U ∑ j = 0 K − 1 α j Λ j ( Λ ) U T = ∑ j = 0 K − 1 α j U Λ j U T = ∑ j = 0 K − 1 α j L j (21) Ug_{\theta}(\Lambda)U^T=U\sum_{j=0}^{K-1}\alpha_j\Lambda^j(\Lambda)U^T=\sum_{j=0}^{K-1}\alpha_jU\Lambda^jU^T=\sum_{j=0}^{K-1}\alpha_jL^j\tag{21} Ugθ(Λ)UT=Uj=0∑K−1αjΛj(Λ)UT=j=0∑K−1αjUΛjUT=j=0∑K−1αjLj(21)
可以看到公式21的最后形态直接是拉普拉斯矩阵,没有特征向量U,也就意味不需要矩阵的特征分解。下面看下公式21的简单证明过程:
因为 U T U = E U^TU=E UTU=E,
L 2 = L L = U Λ U T U Λ U T = U Λ 2 U T L^2=LL=U\Lambda U^TU\Lambda U^T=U\Lambda^2U^T L2=LL=UΛUTUΛUT=UΛ2UT
同理:
L 3 = U Λ 3 U T L^3=U\Lambda^3U^T L3=UΛ3UT
⋮ \vdots ⋮
L n = U Λ n U T L^n=U\Lambda^nU^T Ln=UΛnUT
因此公式21中的
U Λ j U T = L j U\Lambda^jU^T=L^j UΛjUT=Lj
因此公式18变成了:
y o u t p u t = σ ( ∑ j = 0 K − 1 α j L j x ) y_{output}=\sigma(\sum_{j=0}^{K-1}\alpha_jL^jx) youtput=σ(j=0∑K−1αjLjx)
从推导过程我们可以知道,这个卷积核不用特征分解,因此计算复杂度低;参数量从n变成了K个,K<n;而且比较重要的一点,就是 L j L^j Lj,相当于邻居矩阵: A j A^j Aj,当j=1时,表示节点的直接邻居信息,j=2时,表示1跳邻居,当j=n时,表示的是n-1跳邻居,不再针对所有节点,而是只对j-1跳邻居进行计算,实现了localization。
图卷积核二代目
还是同样的文章里面
Convolutional Neural Networks on Graphs with Fast Localized Spectral Filtering
介绍了契比雪夫Chebyshev多项式卷积核,也是本文GCN用的卷积核。
同样的,是将中的 g θ ( Λ ) g_{\theta}(\Lambda) gθ(Λ)换成另外一种形式,即替换为契比雪夫多项式:
g θ ( Λ ) = ∑ j = 0 K − 1 β k T k ( Λ ~ ) g_{\theta}(\Lambda)=\sum_{j=0}^{K-1}\beta_kT_k(\tilde\Lambda) gθ(Λ)=j=0∑K−1βkTk(Λ~)
其中 β k \beta_k βk是我们要学习的参数,后面则是契比雪夫多项式(特征值矩阵做为输入)
T k ( x ) = cos ( k ⋅ arccos ( x ) ) (22) T_k(x)=\cos(k\cdot\arccos(x))\tag{22} Tk(x)=cos(k⋅arccos(x))(22)
公式22中 a r c c o s ( x ) arccos(x) arccos(x)的定义域为[-1,1],而拉普拉斯的特征值取值范围是大于0的实数,因此要将拉普拉斯的特征值映射到[-1,1]上:
先将 Λ λ m a x \cfrac{\Lambda}{\lambda_{max}} λmaxΛ,这样特征值取值范围就变成了[0,1],然后使得:
Λ ~ = 2 Λ λ m a x − I \tilde \Lambda=2\cfrac{\Lambda}{\lambda_{max}}-I Λ~=2λmaxΛ−I
特征值取值范围就变成了 2 × [ 0 , 1 ] − 1 2\times [0,1]-1 2×[0,1]−1,变成了[-1,1]。
这里是对特征向量做操作,我们是要避免矩阵分解的,因此,如果我们直接对拉普拉斯矩阵做上面的缩放操作,也会使得缩放后的矩阵的特征向量的取值范围变成了[-1,1]:
L ~ = 2 L λ m a x − I \tilde L=2\cfrac{L}{\lambda_{max}}-I L~=2λmaxL−I
说明:
这里虽然还是涉及到了 λ m a x \lambda_{max} λmax,但是在线代里面求最大那个特征向量 λ m a x \lambda_{max} λmax可以不涉及特征分解。
契比雪夫多项式具有如下性质:
T k ( L ~ ) = 2 L ~ T k − 1 ( L ~ ) − T k − 2 ( L ~ ) T_k(\tilde L)=2\tilde LT_{k-1}(\tilde L)-T_{k-2}(\tilde L) Tk(L~)=2L~Tk−1(L~)−Tk−2(L~)
T 0 ( L ~ ) = I , T 1 ( L ~ ) = L ~ (23) T_0(\tilde L)=I,T_1(\tilde L)=\tilde L\tag{23} T0(L~)=I,T1(L~)=L~(23)
GCN其实就是用了公式23(契比雪夫多项式)的第0项和第1项
接下来继续看:
y o u t p u t = σ ( U g θ ( Λ ) U T x ) = σ ( U ∑ j = 0 K − 1 β k T k ( Λ ~ ) U T x ) \begin{aligned}y_{output}&=\sigma(Ug_{\theta}(\Lambda)U^Tx)\\ &=\sigma(U\sum_{j=0}^{K-1}\beta_kT_k(\tilde\Lambda)U^Tx)\end{aligned} youtput=σ(Ugθ(Λ)UTx)=σ(Uj=0∑K−1βkTk(Λ~)UTx)
由于契比雪夫多项式是用特征值对角矩阵进行的输入,因此可以把两边的矩阵放到里面一起操作:
y o u t p u t = σ ( ∑ j = 0 K − 1 β k T k ( U Λ ~ U T ) x ) y_{output}=\sigma(\sum_{j=0}^{K-1}\beta_kT_k(U\tilde\Lambda U^T)x) youtput=σ(j=0∑K−1βkTk(UΛ~UT)x)
U Λ ~ U T U\tilde\Lambda U^T UΛ~UT这项在上面证明过,就是等于 L ~ \tilde L L~的
因此,最后的推导结果为:
y o u t p u t = σ ( ∑ j = 0 K − 1 β k T k ( L ~ ) x ) y_{output}=\sigma(\sum_{j=0}^{K-1}\beta_kT_k(\tilde L)x) youtput=σ(j=0∑K−1βkTk(L~)x)
契比雪夫多项式例子
假设有如下无向图(这个图上面也有):
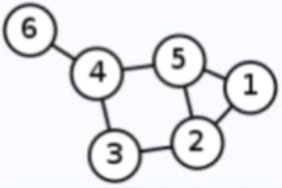
当k=0时,根据公式23:
∑ j = 0 K − 1 β k T k ( L ~ ) = β 0 T 0 ( L ~ ) = β 0 I = β 0 \sum_{j=0}^{K-1}\beta_kT_k(\tilde L)=\beta_0T_0(\tilde L)=\beta_0I=\beta_0 j=0∑K−1βkTk(L~)=β0T0(L~)=β0I=β0
那么这个时候的卷积核为:
( β 0 0 0 0 0 0 0 β 0 0 0 0 0 0 0 0 β 0 0 0 0 0 0 0 β 0 0 0 0 0 0 0 β 0 0 0 0 0 0 0 β 0 ) \begin{pmatrix} \beta_0 &0 & 0 &0 &0 &0 \\ 0 & \beta_0& 0 & 0 & 0 &0 \\ 0 & 0& 0 \beta_0& 0& 0 &0 \\ 0 & 0& 0& \beta_0&0 &0 \\ 0 & 0&0 &0 & \beta_0&0 \\ 0 &0 &0 &0 &0 & \beta_0 \end{pmatrix} ⎝⎜⎜⎜⎜⎜⎜⎛β0000000β00000000β0000000β0000000β0000000β0⎠⎟⎟⎟⎟⎟⎟⎞
当k=1时,根据公式23:
∑ j = 0 K − 1 β k T k ( L ~ ) = β 0 T 0 ( L ~ ) + β 1 T 1 ( L ~ ) = β 0 + β 1 L ~ \sum_{j=0}^{K-1}\beta_kT_k(\tilde L)=\beta_0T_0(\tilde L)+\beta_1T_1(\tilde L)=\beta_0+\beta_1\tilde L j=0∑K−1βkTk(L~)=β0T0(L~)+β1T1(L~)=β0+β1L~
L = I − D − 0.5 A D − 0.5 L=I-D^{-0.5}AD^{-0.5} L=I−D−0.5AD−0.5
度矩阵:
D = ( 2 0 0 0 0 0 0 3 0 0 0 0 0 0 2 0 0 0 0 0 0 3 0 0 0 0 0 0 3 0 0 0 0 0 0 1 ) D=\begin{pmatrix} 2 & 0& 0&0 & 0 & 0\\ 0 & 3& 0&0 & 0 & 0 \\ 0 & 0& 2&0 & 0 & 0 \\ 0 & 0& 0&3 & 0 & 0 \\ 0 & 0& 0&0 & 3 & 0\\ 0 & 0& 0&0 & 0 & 1 \end{pmatrix} D=⎝⎜⎜⎜⎜⎜⎜⎛200000030000002000000300000030000001⎠⎟⎟⎟⎟⎟⎟⎞
邻接矩阵:
A = ( 0 1 0 0 1 0 1 0 1 0 1 0 0 1 0 1 0 0 0 0 1 0 1 1 1 1 0 1 0 0 0 0 0 1 0 0 ) A=\begin{pmatrix} 0 & 1& 0&0 & 1 & 0\\ 1 & 0& 1&0 & 1 & 0 \\ 0 & 1& 0&1 & 0 & 0 \\ 0 & 0& 1&0 & 1 & 1 \\ 1 & 1& 0&1 & 0 & 0\\ 0 & 0& 0&1 & 0 & 0 \end{pmatrix} A=⎝⎜⎜⎜⎜⎜⎜⎛010010101010010100001011110100000100⎠⎟⎟⎟⎟⎟⎟⎞
D − 0.5 A D − 0.5 = ( 0 1 / 2 0 0 1 / 2 0 1 / 3 0 1 / 3 0 1 / 3 0 0 1 / 2 0 1 / 2 0 0 0 0 1 / 3 0 1 / 3 1 / 3 1 / 3 1 / 3 0 1 / 3 0 0 0 0 0 1 0 0 ) D^{-0.5}AD^{-0.5}=\begin{pmatrix} 0 & 1/2& 0&0 & 1/2 & 0\\ 1/3 & 0& 1/3&0 & 1/3 & 0 \\ 0 & 1/2& 0&1/2 & 0 & 0 \\ 0 & 0& 1/3&0 & 1/3 & 1/3 \\ 1/3 & 1/3& 0&1/3 & 0 & 0\\ 0 & 0& 0&1 & 0 & 0 \end{pmatrix} D−0.5AD−0.5=⎝⎜⎜⎜⎜⎜⎜⎛01/3001/301/201/201/3001/301/300001/201/311/21/301/3000001/300⎠⎟⎟⎟⎟⎟⎟⎞
L = I − D − 0.5 A D − 0.5 = ( 1 − 1 / 2 0 0 − 1 / 2 0 − 1 / 3 1 − 1 / 3 0 − 1 / 3 0 0 − 1 / 2 1 − 1 / 2 0 0 0 0 − 1 / 3 1 − 1 / 3 − 1 / 3 − 1 / 3 − 1 / 3 0 − 1 / 3 1 0 0 0 0 − 1 0 1 ) L=I-D^{-0.5}AD^{-0.5}=\begin{pmatrix} 1 & -1/2& 0&0 & -1/2 & 0\\ -1/3 & 1& -1/3&0 & -1/3 & 0 \\ 0 & -1/2& 1&-1/2 & 0 & 0 \\ 0 & 0& -1/3&1 & -1/3 & -1/3 \\ -1/3 & -1/3& 0&-1/3 &1 & 0\\ 0 & 0& 0&-1 & 0 & 1 \end{pmatrix} L=I−D−0.5AD−0.5=⎝⎜⎜⎜⎜⎜⎜⎛1−1/300−1/30−1/21−1/20−1/300−1/31−1/30000−1/21−1/3−1−1/2−1/30−1/310000−1/301⎠⎟⎟⎟⎟⎟⎟⎞
然后按照公式将 L L L变成 L ~ \tilde L L~
L ~ = 2 L λ m a x − I \tilde L=2\cfrac{L}{\lambda_{max}}-I L~=2λmaxL−I
L的最大特征值 λ m a x \lambda_{max} λmax约为:1.87667(https://zs.symbolab.com/)
可以看到当k=1的时候,实际上就是加入了图邻接一跳的邻居信息。
小结
1.切比雪夫多项式的递归定义:
{ T 0 ( x ) = 1 T 1 ( x ) = x T n + 1 ( x ) = 2 x T n ( x ) − T n − 1 ( x ) \begin{cases} & T_0(x)=1\\ & T_1(x)=x \\ & T_{n+1}(x)=2xT_n(x)-T_{n-1}(x) \end{cases} ⎩⎪⎨⎪⎧T0(x)=1T1(x)=xTn+1(x)=2xTn(x)−Tn−1(x)
2.切比雪夫卷积核:
{ g θ ′ ( Λ ) ≈ ∑ k = 0 K − 1 θ k ′ T k ( Λ ~ ) Λ ~ = 2 λ m a x Λ − I N \begin{cases} & g_{\theta'}(\Lambda)\approx\sum_{k=0}^{K-1}\theta_k'T_k(\tilde\Lambda)\\ & \tilde\Lambda=\cfrac{2}{\lambda_{max}}\Lambda-I_N \end{cases} ⎩⎨⎧gθ′(Λ)≈∑k=0K−1θk′Tk(Λ~)Λ~=λmax2Λ−IN
3.切比雪夫图卷积:
{ g θ ′ ⋆ x ≈ ∑ k = 0 K − 1 θ k ′ T k ( L ~ ) x L ~ = 2 λ m a x L − I N \begin{cases} & g_{\theta'}\star x\approx\sum_{k=0}^{K-1}\theta_k'T_k(\tilde L)x\\ & \tilde L=\cfrac{2}{\lambda_{max}}L-I_N \end{cases} ⎩⎨⎧gθ′⋆x≈∑k=0K−1θk′Tk(L~)xL~=λmax2L−IN
GCN公式推导
铺垫了这么多,终于到了正题,原文对应第二节,前面几个公式都用的切比雪夫的,不用多说,从公式6看:
g θ ′ ⋆ x ≈ ∑ k = 0 K − 1 θ k ′ T k ( L ~ ) x g_{\theta'}\star x\approx\sum_{k=0}^{K-1}\theta_k'T_k(\tilde L)x gθ′⋆x≈k=0∑K−1θk′Tk(L~)x
如果只考虑k=0和k=1:
g θ ′ ⋆ x ≈ θ 0 ′ x + θ 1 ′ L ~ x = θ 0 ′ x + θ 1 ′ ( 2 λ m a x L − I N ) x g_{\theta'}\star x\approx\theta_0'x+\theta_1'\tilde Lx=\theta_0'x+\theta_1'(\cfrac{2}{\lambda_{max}}L-I_N)x gθ′⋆x≈θ0′x+θ1′L~x=θ0′x+θ1′(λmax2L−IN)x
论文中提到GCN的 λ m a x ≈ 2 \lambda_{max}\approx2 λmax≈2,代入上面可以得(为什么是2看这里,老师提供了链接:https://zhuanlan.zhihu.com/p/65447367):
g θ ′ ⋆ x ≈ θ 0 ′ x + θ 1 ′ ( L − I N ) x g_{\theta'}\star x\approx\theta_0'x+\theta_1'(L-I_N)x gθ′⋆x≈θ0′x+θ1′(L−IN)x
论文里面设定的拉普拉斯矩阵: L = I N − D − 1 2 A D − 1 2 L=I_N-D^{-\frac{1}{2}}AD^{-\frac{1}{2}} L=IN−D−21AD−21,代入上面得原文公式6
g θ ′ ⋆ x ≈ θ 0 ′ x − θ 1 ′ D − 1 2 A D − 1 2 x g_{\theta'}\star x\approx\theta_0'x-\theta_1'D^{-\frac{1}{2}}AD^{-\frac{1}{2}}x gθ′⋆x≈θ0′x−θ1′D−21AD−21x
这个时候两个参数不一样(而且二者没有约束),一个是参数量大,二是容易过拟合,因此都设置成一样的。In practice, it can be beneficial to constrain the number of parameters further to address overfitting and to minimize the number of operations (such as matrix multiplications) per layer.
设置 θ 0 ′ = − θ 1 ′ = θ \theta_0'=-\theta_1'=\theta θ0′=−θ1′=θ,得到公式7:
g θ ′ ⋆ x ≈ θ ( I N + D − 1 2 A D − 1 2 ) x g_{\theta'}\star x\approx\theta(I_N+D^{-\frac{1}{2}}AD^{-\frac{1}{2}})x gθ′⋆x≈θ(IN+D−21AD−21)x
由于 I N + D − 1 2 A D − 1 2 I_N+D^{-\frac{1}{2}}AD^{-\frac{1}{2}} IN+D−21AD−21的特征值取值范围是[0,2],这个范围不好,因为这样会造成梯度消失或者爆炸(这也是为什么很多NN网络要加normalization操作),因此原文加了一个:renormalization trick:
I N + D − 1 2 A D − 1 2 → D ~ − 1 2 A ~ D ~ − 1 2 I_N+D^{-\frac{1}{2}}AD^{-\frac{1}{2}}\rightarrow \tilde D^{-\frac{1}{2}}\tilde A\tilde D^{-\frac{1}{2}} IN+D−21AD−21→D~−21A~D~−21
其中:
A ~ = A + I N , D ~ i i = ∑ j A ~ i j \tilde A=A+I_N,\tilde D_{ii}=\sum_j\tilde A_{ij} A~=A+IN,D~ii=j∑A~ij
因此,得到了最后的公式8:
Z = D ~ − 1 2 A ~ D ~ − 1 2 X Θ Z=\tilde D^{-\frac{1}{2}}\tilde A\tilde D^{-\frac{1}{2}}X\Theta Z=D~−21A~D~−21XΘ
实验设置和结果分析

数据集
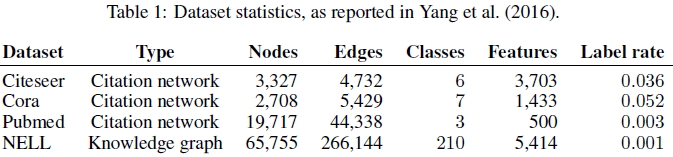
由于是半监督学习,最后一列是带有label的节点的比例。
Cora这个应该比较熟悉了
最后一个是知识图谱的数据集,是bipartite graph(二分图)
节点分类任务

消息传递方式比较

运行效率

总结
关键点
• 模型结构
• 图的拉普拉斯矩阵
• Chebyshev多项式卷积核
• 频域分析
创新点
• 空域和频域联系
• 1st-Chebyshev卷积核实用(就是k=0和k=1的情况)
• 半监督框架+ layer-wise GCN
启发点
• GCN实用化的开始,1st-ChebyshevGCN
• 将chebyshev多项式卷积核截断近似为K=1
• 演化出很多GCN为基础的模型,如RGCN等
• 半监督框架的消息传递策略融合了点的特征和图结构
• 与GNN常用框架之间的联系
• GCN、GAT、GraphSAGE都是非常重要的模型,也是经典baseline
代码复现

https://github.com/tkipf/pygcn
数据集就用cora。
train.py
from __future__ import division
from __future__ import print_functionimport time
import argparse
import numpy as npimport torch
import torch.nn.functional as F
import torch.optim as optimfrom pygcn.utils import load_data, accuracy
from pygcn.models import GCN# Training settings
parser = argparse.ArgumentParser()
# 禁用CUDA训练
parser.add_argument('--no-cuda', action='store_true', default=False,help='Disables CUDA training.')
#是否在训练过程中进行验证
parser.add_argument('--fastmode', action='store_true', default=False,help='Validate during training pass.')
#随机种子
parser.add_argument('--seed', type=int, default=42, help='Random seed.')
#epoch数量
parser.add_argument('--epochs', type=int, default=200,help='Number of epochs to train.')
#学习率
parser.add_argument('--lr', type=float, default=0.01,help='Initial learning rate.')
#权重衰减
parser.add_argument('--weight_decay', type=float, default=5e-4,help='Weight decay (L2 loss on parameters).')
#隐藏层大小
parser.add_argument('--hidden', type=int, default=16,help='Number of hidden units.')
#dropout参数
parser.add_argument('--dropout', type=float, default=0.5,help='Dropout rate (1 - keep probability).')args = parser.parse_args()
#jupyter要用下面这句
#args=parser.parse_args(args=[])
args.cuda = not args.no_cuda and torch.cuda.is_available()#产生随机数种子
np.random.seed(args.seed)
torch.manual_seed(args.seed)
if args.cuda:torch.cuda.manual_seed(args.seed)# Load data
#与GAT差不多
#加载数据
#adj:adj样本关系的对称邻接矩阵的稀疏张量
#features:样本特征张量
#labels:样本标签
#idx train:训练集索引列表
#idx val:验证集索引列表
#idx_test:测/试集索引列表
adj, features, labels, idx_train, idx_val, idx_test = load_data()# Model and optimizer
#模型和优化器# GCN模型
# nfeat输入单元数,shape[1]表示特征矩阵的维度数(列数)
# nhid中间层单元数量
# nclass输出单元数,即样本标签数=样本标签最大值+1,cora里面是7
# dropout参数
model = GCN(nfeat=features.shape[1],nhid=args.hidden,nclass=labels.max().item() + 1,dropout=args.dropout)# 构造一个优化器对象0ptimizer,用来保存当前的状态,并能够根据计算得到的梯度来更新参数
# Adam优化器
# 1r学习率
# weight_decay权重衰减(L2惩罚)
optimizer = optim.Adam(model.parameters(),lr=args.lr, weight_decay=args.weight_decay)#gpu执行下面代码
if args.cuda:model.cuda()features = features.cuda()adj = adj.cuda()labels = labels.cuda()idx_train = idx_train.cuda()idx_val = idx_val.cuda()idx_test = idx_test.cuda()def train(epoch):#取当前时间t = time.time()#train的时候使用dropout,测试的时候不使用dropout#pytorch里面eval()固定整个网络参数,没有dropoutmodel.train()#把梯度置零,也就是把loss关于weight的导数变成0optimizer.zero_grad()#执行GCN中的forward前向传播output = model(features, adj)#最大似然/log似然损失函数,idx_train是140(0~139)#nll loss:negative log likelihood loss #https://www.cnblogs.com/marsggbo/p/10401215.htmlloss_train = F.nll_loss(output[idx_train], labels[idx_train])#计算准确率acc_train = accuracy(output[idx_train], labels[idx_train])#反向传播loss_train.backward()#梯度下降optimizer.step()if not args.fastmode:# Evaluate validation set performance separately,# deactivates dropout during validation run.model.eval()#EVAL不启用bn和dropoutoutput = model(features, adj)#EVAL的最大似然/log似然损失函数,idxval是300(200-499)loss_val = F.nll_loss(output[idx_val], labels[idx_val])#EVAL的准确率acc_val = accuracy(output[idx_val], labels[idx_val])#正在送代的epoch数#训练集损失函数值#训练集准确率#验证集损失函数值#验证集准确率#运行时间print('Epoch: {:04d}'.format(epoch+1),'loss_train: {:.4f}'.format(loss_train.item()),'acc_train: {:.4f}'.format(acc_train.item()),'loss_val: {:.4f}'.format(loss_val.item()),'acc_val: {:.4f}'.format(acc_val.item()),'time: {:.4f}s'.format(time.time() - t))#测试,参考EVAL注释即可
def test():model.eval()output = model(features, adj)loss_test = F.nll_loss(output[idx_test], labels[idx_test])acc_test = accuracy(output[idx_test], labels[idx_test])print("Test set results:","loss= {:.4f}".format(loss_test.item()),"accuracy= {:.4f}".format(acc_test.item()))# Train model
t_total = time.time()
#根据设置epoch数量进行训练
for epoch in range(args.epochs):train(epoch)
print("Optimization Finished!")
print("Total time elapsed: {:.4f}s".format(time.time() - t_total))# Testing
test()util.py
import numpy as np
import scipy.sparse as sp
import torchdef encode_onehot(labels):classes = set(labels)#identity创建方矩阵#字典key为labe1的值,value为矩阵的每一行classes_dict = {c: np.identity(len(classes))[i, :] for i, c inenumerate(classes)}#get函数得到字典key对应的value#map()会根据提供的函数对指定序列做映射#第一个参数 function 以参数序列中的每一个元素调用function函数,返回包含每次 function 函数返回值的新列表#map(lambdax:x**2,[1,2,3,4,5])#output:[1,4,9,16,25]labels_onehot = np.array(list(map(classes_dict.get, labels)),dtype=np.int32)return labels_onehotdef load_data(path="./data/cora/", dataset="cora"):"""Load citation network dataset (cora only for now)"""print('Loading {} dataset...'.format(dataset))#content file的每一行的格式为:<paper_id> <word attributes><class_label>#三个字段的index分别对应0,1:-1,-1#feature为第二列到倒数第二列,labe1s为最后一列idx_features_labels = np.genfromtxt("{}{}.content".format(path, dataset),dtype=np.dtype(str))#储存为csr型稀疏矩阵features = sp.csr_matrix(idx_features_labels[:, 1:-1], dtype=np.float32)labels = encode_onehot(idx_features_labels[:, -1])# build graph# cites file的每一行格式为:<cited paper ID:被引用文章编号><citing paper ID:引用文章的编号># 根据前面的contents与这里的cites创建图,算出edges矩阵与adj矩阵idx = np.array(idx_features_labels[:, 0], dtype=np.int32)# 由于文件中节点并非是按顺序排列的,因此建立一个编号为0-(node_size-1)的哈希表idx_map# 哈希表中每一项为o1d id:number,即节点id对应的编号为numberidx_map = {j: i for i, j in enumerate(idx)}#edges_unordered为直接从边表文件中直接读取的结果,是一个(edge_num,2)的数组,每一行表示一条边两个端点的idxedges_unordered = np.genfromtxt("{}{}.cites".format(path, dataset),dtype=np.int32)#flatten:降维,返回一维数组,这里把是1*2的数组展开为1维数组#边的edges unordered中存储的是端点id,要将每一项的o1d id换成编号number(新编号)#在idx_map中以idx作为键查找得到对应节点的编号,reshape成与edges_unordered形状一样的数组edges = np.array(list(map(idx_map.get, edges_unordered.flatten())),dtype=np.int32).reshape(edges_unordered.shape)#根据coo矩阵性质,这一段的作用是:网络有多少条边,邻接矩阵就有多少个1,#所以先创建一个长度为edge_num的全1数组,每个1的填充位置就是一条边中两个端点的编号,#即edges[:,0],edges[:,1],矩阵的形状为(node_size,node_size)adj = sp.coo_matrix((np.ones(edges.shape[0]), (edges[:, 0], edges[:, 1])),shape=(labels.shape[0], labels.shape[0]),dtype=np.float32)# build symmetric adjacency matrix# 对于无向图,邻接矩阵是对称的。上一步得到的adj是按有向图构建的,转换成无向图的邻接矩阵需要扩充成对称矩阵# 将i->j与j->i中权重最大的那个,作为无向图的节点节点j的边权。# 原文NELL数据集用了这个操作# https://blog.csdn.net/Eric_1993/article/details/102907104adj = adj + adj.T.multiply(adj.T > adj) - adj.multiply(adj.T > adj)features = normalize(features)# eye创建单位矩阵,第一个参数为行数,第二个为列数# normalize对应论文里A^=(D~)-1A~这个公式# +eye,对应公式A-=A+I_Nadj = normalize(adj + sp.eye(adj.shape[0]))#分别构建训练集、验证集、测试集,并创建特征矩阵、标签向量和邻接矩阵的tensor,用来做模型的输入idx_train = range(140)idx_val = range(200, 500)idx_test = range(500, 1500)features = torch.FloatTensor(np.array(features.todense()))labels = torch.LongTensor(np.where(labels)[1])#邻接矩阵(coo矩阵)转为torch的稀疏tensor处理adj = sparse_mx_to_torch_sparse_tensor(adj)idx_train = torch.LongTensor(idx_train)idx_val = torch.LongTensor(idx_val)idx_test = torch.LongTensor(idx_test)return adj, features, labels, idx_train, idx_val, idx_testdef normalize(mx):"""Row-normalize sparse matrix"""#mx是邻接矩阵,传进来之后,先做行和,得到每一个节点的度就是得到D这个矩阵rowsum = np.array(mx.sum(1))#然后对度矩阵求倒数,得到D^-1(这里不是矩阵,是数组)r_inv = np.power(rowsum, -1).flatten()#如果某一行全为0,则r inv算出来会等于无穷大,将这些行的rinv置为0r_inv[np.isinf(r_inv)] = 0.#用度的一维数组构建对角元素为r_inv的对角矩阵r_mat_inv = sp.diags(r_inv)#再和邻接矩阵mx做点乘mx = r_mat_inv.dot(mx)return mxdef accuracy(output, labels):#使用type as(tesnor)将张量转换为给定类型的张量preds = output.max(1)[1].type_as(labels)#记录等于preds的label eq:equalcorrect = preds.eq(labels).double()correct = correct.sum()#预测正确数量/总数return correct / len(labels)def sparse_mx_to_torch_sparse_tensor(sparse_mx):"""Convert a scipy sparse matrix to a torch sparse tensor."""sparse_mx = sparse_mx.tocoo().astype(np.float32)indices = torch.from_numpy(np.vstack((sparse_mx.row, sparse_mx.col)).astype(np.int64))values = torch.from_numpy(sparse_mx.data)shape = torch.Size(sparse_mx.shape)#只用记录有值的索引,值,以及shapereturn torch.sparse.FloatTensor(indices, values, shape)model.py
import torch.nn as nn
import torch.nn.functional as F
from pygcn.layers import GraphConvolutionclass GCN(nn.Module):# nfeat输入单元数,shape[1]表示特征矩阵的维度数(列数)# nhid中间层单元数量# nclass输出单元数,即样本标签数=样本标签最大值+1,cora里面是7# dropout参数def __init__(self, nfeat, nhid, nclass, dropout):super(GCN, self).__init__()# nfeat输入,nhid第一层输出,第二层的输入,nclass输出self.gc1 = GraphConvolution(nfeat, nhid)self.gc2 = GraphConvolution(nhid, nclass)self.dropout = dropout#x是输入特征,adj是邻接矩阵def forward(self, x, adj):#第一层加非线性函数和dropoutx = F.relu(self.gc1(x, adj))x = F.dropout(x, self.dropout, training=self.training)##gc2层x = self.gc2(x, adj)#输出为输出层做1og_softmax变换的结果,dim表示1og_softmax将计算的维度return F.log_softmax(x, dim=1)layer.py
import torch.nn as nn
import torch.nn.functional as F
from pygcn.layers import GraphConvolutionclass GCN(nn.Module):# nfeat输入单元数,shape[1]表示特征矩阵的维度数(列数)# nhid中间层单元数量# nclass输出单元数,即样本标签数=样本标签最大值+1,cora里面是7# dropout参数def __init__(self, nfeat, nhid, nclass, dropout):super(GCN, self).__init__()# nfeat输入,nhid第一层输出,第二层的输入,nclass输出self.gc1 = GraphConvolution(nfeat, nhid)self.gc2 = GraphConvolution(nhid, nclass)self.dropout = dropout#x是输入特征,adj是邻接矩阵def forward(self, x, adj):#第一层加非线性函数和dropoutx = F.relu(self.gc1(x, adj))x = F.dropout(x, self.dropout, training=self.training)##gc2层x = self.gc2(x, adj)#输出为输出层做1og_softmax变换的结果,dim表示1og_softmax将计算的维度return F.log_softmax(x, dim=1)作业
【思考题】将实践的代码与论文中的公式对应起来,回顾模型是如何实现的。
【代码实践】为算法设置不同的参数,GCN的层数、hidden_size的大小对模型效果的影响。
【总结】总结GCN的关键技术以及如何代码实现。
这篇关于深度之眼Paper带读笔记GNN.08.GCN的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




