本文主要是介绍基于51单片机交通信号灯仿真_东西管制+南北管制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
基于51单片机交通信号灯仿真_东西管制+南北管制
仿真:proteus 7.8
程序编译器:keil 4/keil 5
编程语言:C语言
设计编号:J003
基本功能
通过单片机模拟交通灯,东西方向黄绿红,南北方向黄绿红的工作方式。
1、显示时间倒计时;
2、南北方向14秒绿灯,最后3秒绿灯闪烁,之后1秒黄灯再转红灯20秒;
3、东西方向19秒绿灯,最后3秒绿灯闪烁,之后1秒黄灯再转红灯15秒;
4、通过按键控制东西方向强制绿灯,或南北方向强制绿灯,数码管显示00,应对紧急情况。
5、具体秒数可在程序改数字实现。
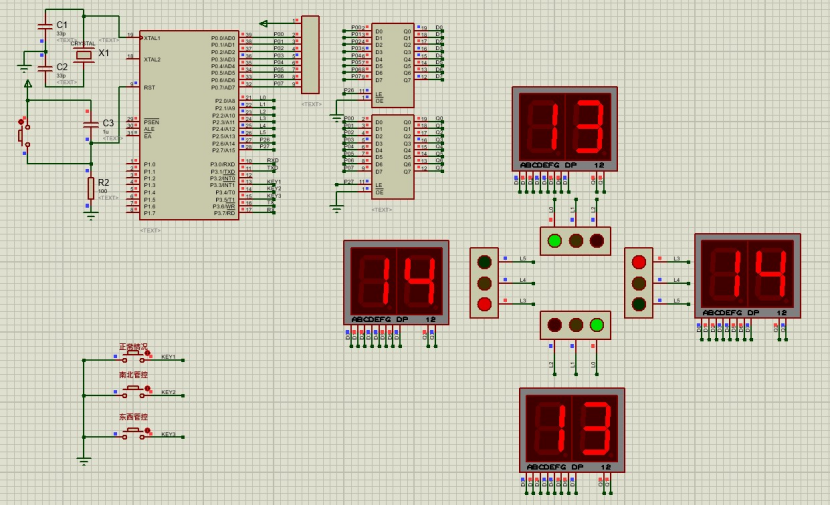
仿真图
正常倒计时和红黄绿灯显示
显示时间倒计时;
1南北方向14秒绿灯,最后3秒绿灯闪烁,之后1秒黄灯再转红灯20秒;
2东西方向19秒绿灯,最后3秒绿灯闪烁,之后1秒黄灯再转红灯15秒;
具体倒计时时间可以根据代码里面的宏定义做修改
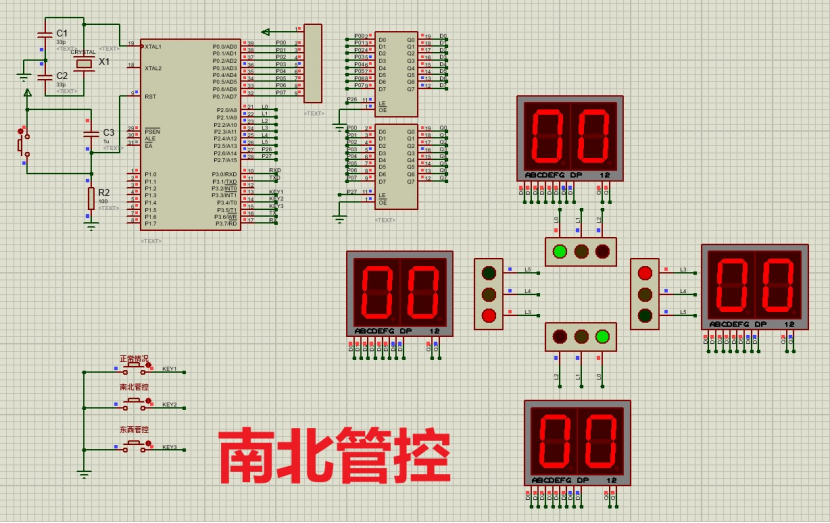
南北管控状态
南北方向强制绿灯,东西方向强制红灯,倒计时显示00
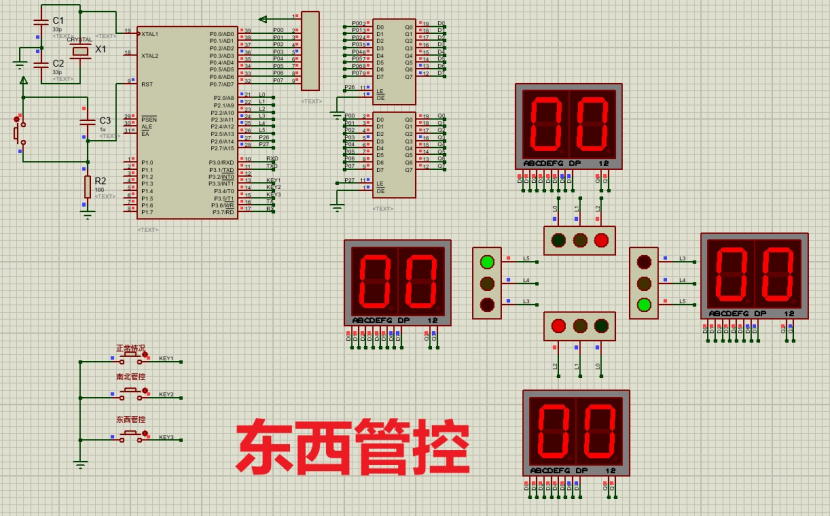
东西管控状态
东西方向强制绿灯,南北方向强制红灯,倒计时显示00
程序
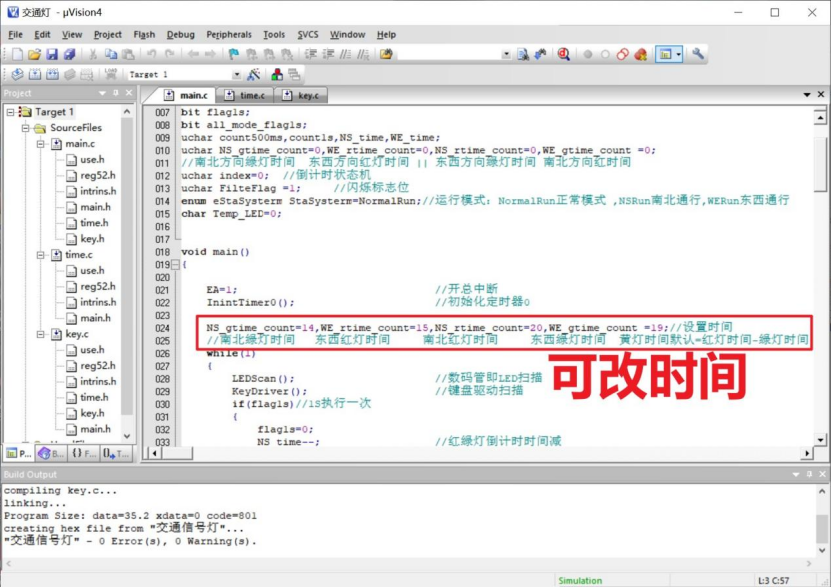
程序讲解
主要的核心点是倒计时,东西直行绿灯时间+黄灯时间=南北红灯时间,
在南北红灯的过程中,东西完成了绿灯倒计时+黄灯倒计时两个步骤。
倒计时的产生
记住这个点就可以设计软件了。首先要有时间基础,倒计时从哪来呢?
一般两个来源:
1,延时
delay(1000ms);
通过死循环卡主软件的运行来达到延时效果,程序执行效率极低,不可取。
2,定时
通过定时器产生时基。软件设置50ms产生一次定时中断,在中断执行函数中做计数。
void InintTimer0()
{TMOD |=0X01;TH0=0X4C;TL0=0X00;ET0=1;TR0=1;//打开定时器中断
}
20ms执行一次中断函数,通过count1s累加到50判断时间过去了一秒。设置一秒标志位flag1s置一。
void Timer0() interrupt 1
{TH0=0XBB;TL0=0X00;KeyScan();if(++count500ms<25){}else{count500ms = 0;if(FilteFlag){//闪烁标志位FilteFlag = 0;}else{FilteFlag =1;}} if(++count1s<50) return;count1s=0;if(StaSysterm==NormalRun) flag1s=1; //非正常运行时,不红绿灯数值不减一 all_mode_flag1s =1;
}
在主函数while循环里判断标志位,如果是1,则倒计时计数值减一,即完成了倒计时的软件设计思路
LEDScan(); //数码管即LED扫描KeyDriver(); //键盘驱动扫描if(flag1s)//1S执行一次{flag1s=0;NS_time--; //红绿灯倒计时时间减WE_time--;}
闪烁状态则通过特殊标志位和时间控制
if((index == 1)&&(NS_time<5)&&(StaSysterm==NormalRun)){//绿灯闪烁,红灯不变if(FilteFlag){//绿灯闪烁 L0闪烁 L3常亮 其他灭 P2 :0000 1001(0x09) 或 0000 1000(0x08)P2=0x09;}else{P2=0x08;}}else if((index == 3)&&((WE_time<5))&&(StaSysterm==NormalRun)){//绿灯闪烁 L5闪烁 L2常亮 其他灭 P2 :0010 0100(0x24) 或 0000 0100(0x04)if(FilteFlag){P2=0x24; }else{P2=0x04; } }
数码管动态显示驱动方式,在主函数中扫描显示倒计时时间。
#include "use.h"
#include "main.h"uchar code seg_du[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
uchar code seg_we[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};
uchar BackupGreen,BackupRed,CopyLight;void Seg_Display(uchar number,uchar wei) //数码管动态显示程序 wei代表数码管Q0 Q1 Q2 Q3的位选
{P0=0XFF;//清零,防止重影we=1;we=0;P0=seg_du[number];du=1;du=0;P0=seg_we[wei];we=1;we=0;
}
红黄绿灯状态处理
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-1CnrleaK-1661873815319)(https://picturebed-1300424929.cos.ap-nanjing.myqcloud.com/typora/%E4%BA%A4%E9%80%9A%E7%81%AF.jpg)]
交通灯状态实际上分为四个状态:
1.南北道绿灯通行,东西道红灯
2.南北道黄灯通行,东西道红灯
3.南北道红灯,东西道绿灯通行
4.南北道红灯,东西道黄灯通行
做一个状态机,设置四个状态,在四个状态的变化中,设置红绿黄灯的亮和灭实现基础交通灯运行逻辑
倒计时显示处理
实际上倒计时显示就是显示main_road_time–; secondary_road_time–;设计函数通过数码管分别显示南北道的NS_time和东西道的WE_time即可
Seg_Display(NS_time/10,0);Seg_Display(NS_time%10,1);Seg_Display(WE_time/10,2);Seg_Display(WE_time%10,3);
资料清单
资料下载链接
这篇关于基于51单片机交通信号灯仿真_东西管制+南北管制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!