本文主要是介绍机器人制作开源方案 | 行星探测车实现云端控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. 功能描述
本文示例所实现的功能为:手机端控制R261样机行星探测车的显示屏显示心形图。
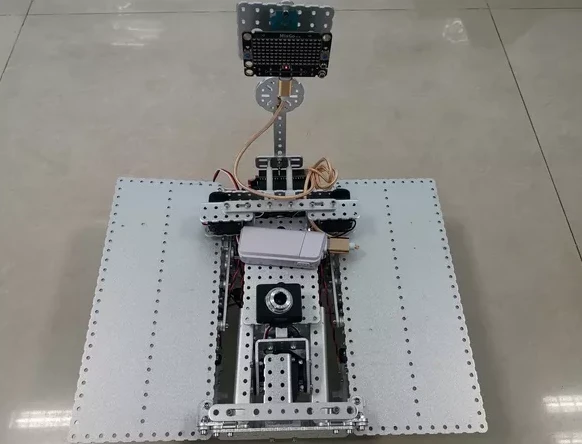
2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:

3. 功能实现
编程环境:Milxy 0.999及以上版本
下面提供一个手机端控制行星探测车显示屏显示心形图的参考程序【云端按钮_控制点阵屏(显示心-退出).mix】:
import mixiotimport onenetimport timedef sub_cb(topic, msg):if msg == 'on'.encode("utf-8"):passif msg == 'off'.encode("utf-8"):passmixiot.wlan_connect('robottime','aaronisfromcug')c = onenet.init_MQTT_client('521931891', '183.230.40.39', '201315', 'TqdRIdejslc0K6p==gYgoqtVLK0=', 'XBCRobot', sub_cb)while True:time.sleep_ms(500)c.check_msg()4. 行星探测车远程通信使用说明
① 用USB线将MixGo(Esp32芯片)主控板与电脑连接(若电脑无法识别,可以使用驱动精灵解决)。

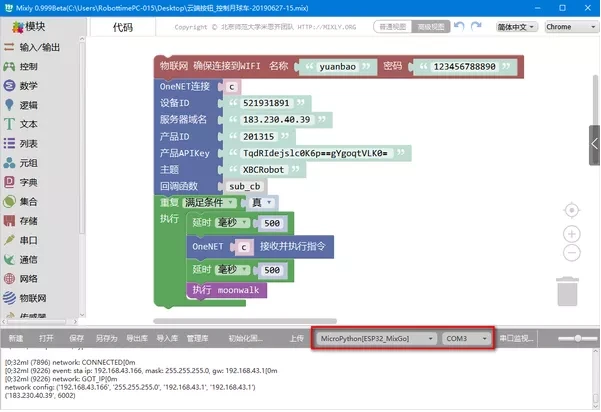
② 用Mixly软件打开.mix程序(如下图所示),选择版型和端口号。
③ 手机打开热点,热点的名称不要含中文字符,并让手机和电脑都连接此热点。

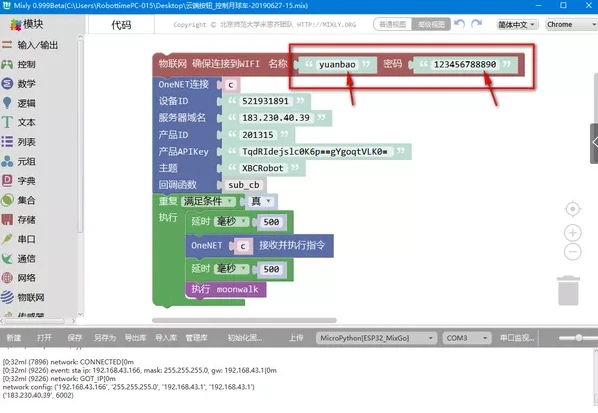
④ 修改程序第一行的WiFi名称和密码,使它与热点相同。④ 修改程序第一行的WiFi名称和密码,使它与热点相同。
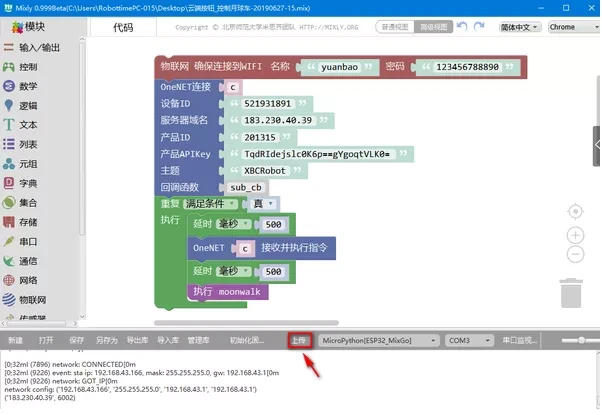
⑤ 然后将程序上传到控制板中。
⑥ 若上传不成功,按一下板子上的BOOT键,选择“初始化固件”,等初始化固件完成后再进行上传。
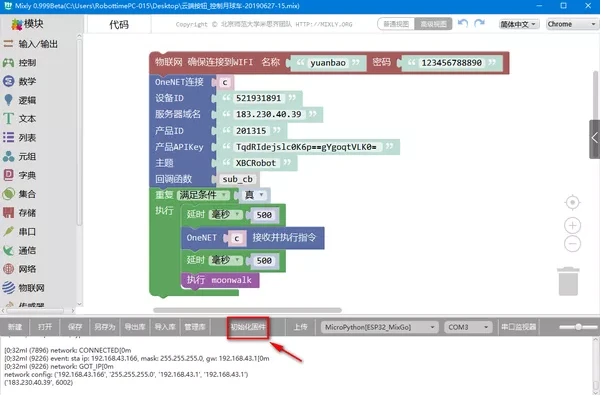
⑦ 程序上传成功后,会看到MixGo屏幕显示信息。此时可以将USB线拔掉,插一个充电宝给MixGo(Esp32芯片)主控板供电。
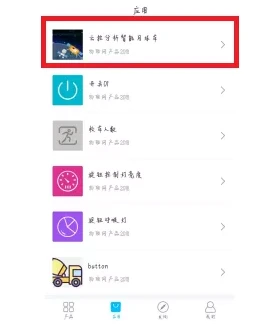
⑧ 自行下载安装下图中的APP到安卓手机内,并登陆账号。

⑨ 选择“云控分析智能月球车”。
⑩ 点击on按钮,进行远程通信。

5. 资料清单
资料内容:程序源代码
资料下载地址:行星探测车-云端控制
这篇关于机器人制作开源方案 | 行星探测车实现云端控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






