本文主要是介绍自动驾驶(六十二)---------导航路径规划,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
实际上关于路径规划,我在轨迹规划中有介绍,主要是A*算法,但是目前有强需求,所以只能在系统总结一下了,可以算是水一篇文章,抓紧时间吧,有效的时间不多了!
导航路径规划需要掌握的方法我总结有四个:RRT、PRM、A*、hybrid A*。A*我之前有介绍:再论轨迹规划,这里就不做赘述。
1. RRT
RRT(快速探索随机树),首先在环境中,我们有一个起始点,定义为Xinit, 然后我们在环境中随机撒一个点,得到点x_rand,如果x_rand不在障碍物区域,则连接起x_init和x_rand, 我们得到一条连线L,如果L整个不在障碍物里面,则沿着L,从x_init向x_rand的方向移动一定的距离,得到一个新的点,x_new,则x_init,x_new和他们之间的线段构成了一颗最简单的树。
树的扩展: 在开始的基础上,继续重复,在环境中撒点,得到无障碍物区域的点x_rand,然后在已经存在的树上找一个离x_rand最近的点x_near,连接两个点,如果这条线没有障碍物,则沿着这条线,从x_near到x_rand移动一定的距离,得到新的点,x_new, 该点被添加到已经存在的树上
规划: 重复上述过程,直到目标点(或其附近的点)被添加到树上,这时我们就可以在树上找到一条从起点到目标点的路径
2. PRM
RRT当环境中的障碍物较为复杂时计算量较大,有没有什么办法优化呢?PRM(Probabilistic Roadmaps)是一种基于图搜索的方法,一共分为两个步骤:学习阶段、查询阶段。它将连续空间转换成离散空间,再利用A*等搜索算法在路线图上寻找路径,以提高搜索效率。
学习阶段:在给定图的自由空间里随机撒点,构建一个路径网络图。 必须是自由空间里的随机点,每个点都要确保机器人与障碍物无碰撞。
查询阶段:根据设定的起点s和终点g,选择合适的路径,首先将s和g点与路径网络中的两个点x,y分别连接,寻找无向路径网络图中x与y连接的路径,这样就可以将起点和终点连接起来,构成全局路径。得到全局路径后,可以使用平滑的方法寻找捷径,优化路径。
3. Hybrid A*
A*算法主要是用在导航中,在车辆轨迹规划中并不好用,这是因为生成的轨迹是折线,这不满足车辆运动学特性,但是A*算法也同样是从一个点到另一个点的一条最优路径,有没有办法转化成车辆可以行使的轨迹线呢?
2010年,斯坦福首次提出一种满足车辆运动学的算法(Hybrid A*),并在(DARPA)的城市挑战赛中得以运用。首先我们采用A*生成一天折线轨迹,节点之间不采用直线相连,而是Reeds-Shepp曲线相连,当然每个节点与节点相连的曲线,要考虑与之相连的节点状态。这样生成的轨迹就是Hybrid A*。那么什么是Reeds-Shepp呢?请看下节:
4. Reeds-Shepp
APA自动泊车可以有各种轨迹实现,如何用最短路径来实现自动泊车呢?首先假设车辆能以固定的半径转向,且车辆能够前进和后退,那么Reeds-Shepp曲线就是车辆在上述条件下从起点到终点的最短路径。在轨迹规划中不仅要求车辆能够到达终点,而且需要车辆的角度也有要求,比如在垂直泊车的过程中,开始车辆平行于道路,终点要求车辆垂直于道路等等,总之车辆的终点位置和终点角度都提出了要求。
首先我们回到车辆运动学:
其中:
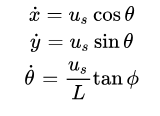
这种固定的运动方式在低速情况下轨迹可以近似一个圆,方向盘转角![]() 转到最大,其转向半径最小,假设最小转向半径为rmin。为了方便起见Reeds-Shepp中最小转向半径强制设置为1,如果车辆的实际最小转向半径不是1,可也通过适当放缩终点坐标来计算该曲线。
转到最大,其转向半径最小,假设最小转向半径为rmin。为了方便起见Reeds-Shepp中最小转向半径强制设置为1,如果车辆的实际最小转向半径不是1,可也通过适当放缩终点坐标来计算该曲线。
下面曲线就是一条Reeds-Shepp曲线,R表示右打方向,+表示前进,图中从![]() 到
到 ![]() ,首先右打方向前进,再左打方向后退,最后右打方向前进到达终点。
,首先右打方向前进,再左打方向后退,最后右打方向前进到达终点。

下表是Reeds-Shepp曲线的基本操作方式,一共有48种操作模式,归为9种Base word,但是在编程求解我们不需要每一种都分开求解,其中他们之间的对称性可以帮助我们减少工作量。例如求解到终点 ![]() 的
的 ![]() 后,我们可以用同样的方法来求解
后,我们可以用同样的方法来求解 ![]() 但是需要将终点换为
但是需要将终点换为 ![]() ,这种处理方法在文中叫timeflip,还有其他的f对称,这里不做介绍可以参看原文。
,这种处理方法在文中叫timeflip,还有其他的f对称,这里不做介绍可以参看原文。

通过这几种组合可以得到最短路径。这里举个例子,从不同位置到达同一目标的Reeds-sheep:

这篇关于自动驾驶(六十二)---------导航路径规划的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







