本文主要是介绍Matlab 机器人工具箱中SE3是什么,如何转换成double,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
先看如下代码
ML1 = Link([0 0 0 pi/2 0 ],'modified');
ML2 = Link([0 0 1 0 0 ],'modified');
ML3 = Link([0 0 1 0 0 ],'modified');
rob = SerialLink([ML1 ML2 ML3],'name','modified');
rob.tool=[eye(3),[1;0;0];0 0 0 1];
rob.plot([40,20,30]/180*pi,'scale',0.5,'delay',0.00001)
P=rob.fkine([-23.23,20,30]/180*pi);
P1 = P;
P = P.T; %将SE3数据类型转换成double数据类型
P=rob.fkine([-23.23,20,30]/180*pi);这一步通过机器人工具箱的正运动学函数得到一个旋转加位移的4*4变换矩阵,产生的P的数据类型就是SE3,SE3数据类型不能直接用来运算,需要通过P = P.T,将其转换为double数据类型。
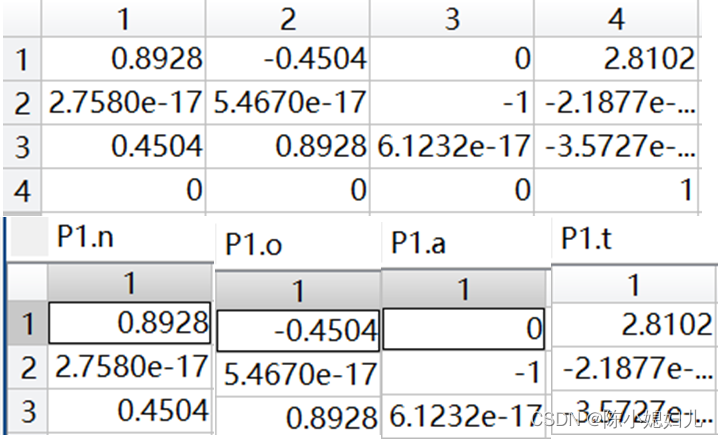
为了直观起见,我们将P与P.T所产生的数据单独拿出来看一下
P的数据

P.T的数据

其中t,n,o,a分别代表平移,以及旋转矩阵的n,s,a
这篇关于Matlab 机器人工具箱中SE3是什么,如何转换成double的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






