本文主要是介绍USACO 2013 US Open Bronze 奶牛芭蕾 (图形学 矩阵坐标变换),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
题目描述
为了挑战人们将奶牛视为笨拙生物的成见,农夫约翰的奶牛贝茜报名参加了芭蕾舞入门班。
她的最后一场演出是下周,约翰想帮她搭建一个足够大的长方形舞台,这样她就可以在不从舞台边沿跌落的情况下表演整个舞蹈。
贝茜的舞蹈将在一个长方形的舞台上进行,这个舞台可以看作由 1×1 的单元格组成的矩阵。
贝茜的四只脚被简明扼要地描述如下:
FR:右前脚
FL:左前脚
RR:右后脚
RL:左后脚
她的四只脚最开始位于四个相邻的单元格中,这四个单元格可以构成一个小正方形,如下所示,贝茜朝北站立:
FL FR
RL RR
贝茜的舞蹈遵循一系列 N 条指令,每条指令要么指示她将一只脚移动一个单元格,要么指示她顺时针转动 90 度。
移动脚的指令由 3 个字符组成,前两个字符表明要移动的脚,最后一个字符指定移动方向(F = 前进,B = 后退,R = 右,L = 左)。
例如,FRF 表示贝茜应该将她的右前脚向前移动一个单元格,RLR 表示她应该将她的左后脚向右移动一个单元格。
当然,运动的方向与贝茜面对的方向是相对的。
贝茜的顺时针转动是以某一只脚作为枢轴而进行的,转动时枢轴脚应保持竖立,并围绕该脚进行顺时针转动。
顺时针转动的指令也由 3 个字符组成,前两个字符表明枢轴脚,最后一个字符为 P,表示该脚作为枢轴。
例如,FRP 表示贝茜应该以右前脚作为枢轴,围绕其顺时针旋转 90 度。
这意味着,如果贝茜的脚现在处于如下位置(贝茜朝北站立):
.. .. ..
.. .. FR
.. FL ..
.. RL RR
执行完 FRP 指令以后,她的脚将位于如下位置,贝茜现在朝东站立:
RL FL ..
RR .. FR
.. .. ..
.. .. ..
给定贝茜舞蹈的 N 条指令,请计算能够使贝茜全程不踩空跌落的长方形舞台的最小面积。
如果贝茜将一只脚移动到与另一只脚相同的单元格内,她就会被绊倒,从而无法完成舞蹈。
这种情况下,请输出 −1。
注意,这是贝茜唯一能够被绊倒的情况,在经过所有练习以后,贝茜十分灵活,很容易摆出各种高难度姿势(例如,后脚比前脚更向前)。
输入格式
第一行包含整数 N。
接下来 N 行,每行包含三个字符,表示一个舞蹈指令。
输出格式
输出在整个舞蹈过程中,能够容纳贝茜的脚所必须的长方形舞台的最小面积。
如果贝茜被绊倒,则输出 −1。
数据范围
1 ≤ N ≤ 1000 1≤N≤1000 1≤N≤1000
输入样例:
3
FRF
FRP
RLB
输出样例:
16
样例解释
贝茜需要一个 4×4 大小的舞台,保证她能够完成她的舞蹈。
她的脚步如下:
.. .. .. ..
.. .. .. .. (朝北)
.. .. FL FR
.. .. RL RR
执行 FRF 后:
.. .. .. ..
.. .. .. FR (朝北)
.. .. FL ..
.. .. RL RR
执行 FRP 后:
.. RL FL ..
.. RR .. FR (朝东)
.. .. .. ..
.. .. .. ..
执行 RLB 后:
RL .. FL ..
.. RR .. FR (朝东)
.. .. .. ..
.. .. .. ..
分析
本题目的关键问题在于矩阵顺时针旋转时的坐标变换:
[ X n e w Y n e w ] = [ X o l d Y o l d ] [ c o s θ − s i n θ s i n θ c o s θ ] \begin{bmatrix} X_{new} Y_{new}\\ \end{bmatrix} = \begin{bmatrix} X_{old} Y_{old}\\ \end{bmatrix} \begin{bmatrix} cosθ & -sinθ \\ sinθ & cosθ \end{bmatrix} [XnewYnew]=[XoldYold][cosθsinθ−sinθcosθ]
由于本题目是旋转90°,所以把θ=90带入得到:
[ X n e w Y n e w ] = [ X o l d Y o l d ] [ c o s 90 − s i n 90 s i n 90 c o s 90 ] = [ X o l d Y o l d ] [ 0 − 1 1 0 ] = [ Y o l d − X o l d ] \begin{bmatrix} X_{new} Y_{new}\\ \end{bmatrix} = \begin{bmatrix} X_{old} Y_{old}\\ \end{bmatrix} \begin{bmatrix} cos90 & -sin90 \\ sin90 & cos90 \end{bmatrix} = \begin{bmatrix} X_{old} Y_{old}\\ \end{bmatrix} \begin{bmatrix} 0 & -1 \\ 1 & 0 \end{bmatrix} = \begin{bmatrix} Y_{old} -X_{old} \end{bmatrix} [XnewYnew]=[XoldYold][cos90sin90−sin90cos90]=[XoldYold][01−10]=[Yold−Xold]
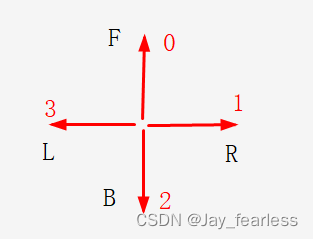
每次旋转过后方向都会改变,我们默认朝前为0。
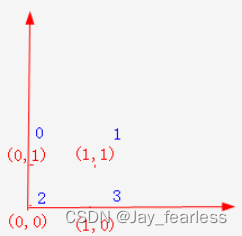
刚开始的四个脚的方位
C++ 代码
#include<bits/stdc++.h>#define x first
#define y second
using namespace std;
typedef pair<int, int> PII;//定义初始四个坐标
PII p[4] = {{0, 1}, {1, 1}, {0, 0}, {1, 0}};
//定义刚开始的四个脚的方位
int dx[4] = {0, 1, 0, -1}, dy[4] = {1, 0, -1, 0};
unordered_map<string, int> id = {{"FL", 0}, {"FR", 1}, {"RL", 2}, {"RR", 3}};
//定义转向的坐标
unordered_map<char, int> turn = {{'F', 0}, {'B', 2}, {'L', 3}, {'R', 1}};
int minx = 0, maxx = 1, miny = 0, maxy = 1;//旋转函数 b相对a转
void rotate(PII& a, PII& b)
{//计算该向亮b.x -= a.x, b.y -= a.y;//由于是顺时针旋转90度,就把坐标带入进行计算int x = b.y, y = -b.x;//新的坐标加等于旧的坐标加上偏移量b.x = a.x + x, b.y = a.y + y;
}int main()
{int n;cin >> n;int d = 0;while (n -- ){string str;cin >> str;int k = id[str.substr(0, 2)];char c = str[2];if (c != 'P'){int t = (d + turn[c]) % 4;p[k].x += dx[t], p[k].y += dy[t];}else{for (int i = 0; i < 4; i ++ ){if (i != k)rotate(p[k], p[i]); }//旋转后方向改变d = (d + 1) % 4;}//检查是否两只脚会踩在同一块地板上,如果有直接输出-1for (int i = 0; i < 4; i ++ )for (int j = 0; j < i; j ++ )if (p[i] == p[j]){puts("-1");return 0;}for (int i = 0; i < 4; i ++ ){// 求出这个过程中最小最大的四个边界minx = min(minx, p[i].x);miny = min(miny, p[i].y);maxx = max(maxx, p[i].x);maxy = max(maxy, p[i].y);}}cout << (maxx - minx + 1) * (maxy - miny + 1) << endl;return 0;
}
这篇关于USACO 2013 US Open Bronze 奶牛芭蕾 (图形学 矩阵坐标变换)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



