本文主要是介绍Contour-Hugging Heatmaps for Landmark Detection阅读笔记,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
代码:https://github.com/jfm15/ContourHuggingHeatmaps
我自己稍微改了一点的https://github.com/Nightmare4214/ContourHuggingHeatmaps
摘要
希望输出landmark的位置和每个landmark的不确定度(Uncertainty)
作者主要贡献:
- 作者通过分类的方式来训练模型
- 通过temperature scaling来校准模型的不确定度
- 利用Expected Radial Error(ERE)来获取不确定度
背景
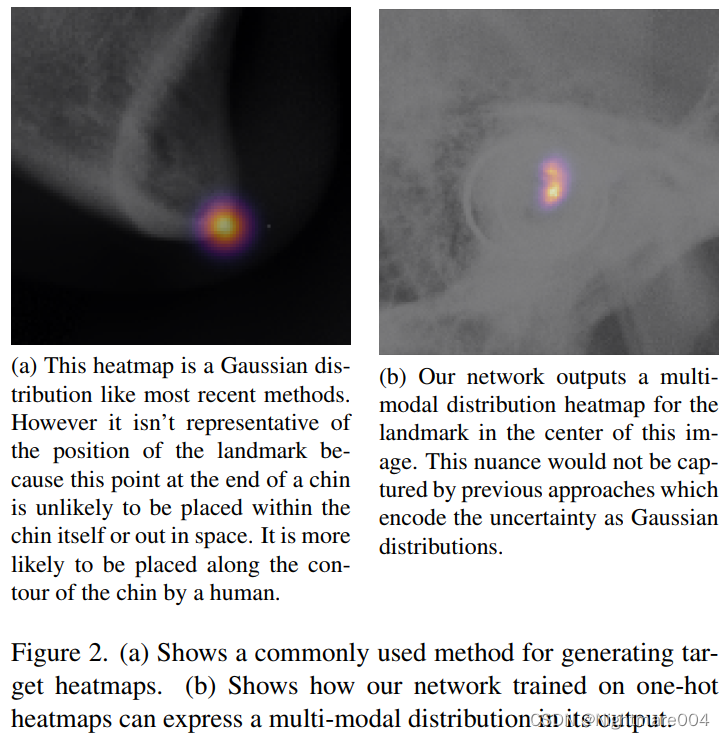
一般的模型回归的是服从高斯分布的heatmap
但是不是所有地方都可能出现landmark,比如说一个landmark,他可能出现在骨头上,不会出现在旁边的软组织上,此时概率不应该是一个圆形的分布,而应该是集中在骨头上的
为了能够预测这种不规则形状,作者采用的是分类的方法,而不是回归高斯heatmap
方法
模型
编码器用的在imagenet预训练的resnet34,解码器是Unet的解码器,最后接了一个 1 × 1 1\times 1 1×1的卷积调整通道输出每个landmark的概率图
其中第一层卷积通过sum,将原本3通道的,改成了1通道
监督信号是one-hot的heatmap(每个landmark有1个对应的heatmap,每个heatmap只有landmark那个位置是1,其他都是0)
模型经过2d softmax,然后用交叉熵计算损失,相当于是做分类/分割问题
temperature sacling
σ l ( i , j ) = e c l ( i , j ) T l ∑ s = 1 w ∑ t = 1 h e c l ( s , t ) T l \sigma_l(i, j)=\frac{e^{\frac{c_l(i, j)}{T_l}}}{\sum_{s=1}^w \sum_{t=1}^h e^{\frac{c_l(s, t)}{T_l}}} σl(i,j)=∑s=1w∑t=1heTlcl(s,t)eTlcl(i,j)
简单来说就是除以一个T之后用softmax
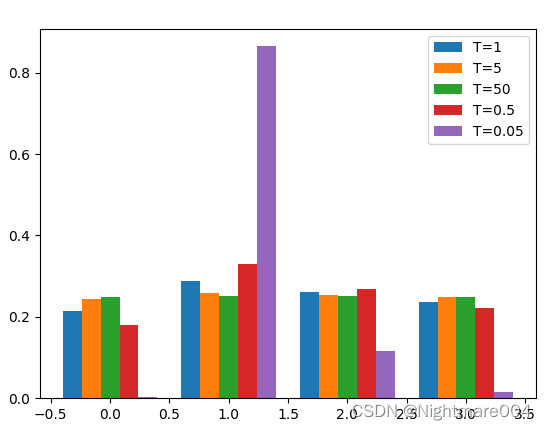
temperature scaling不改变模型的精度(因为softmax是单调函数),但是可以改变方差
如下图,可以看到T越小差距越大,T越大差距越小
#!/usr/bin/env python
# _*_ coding:utf-8 _*_
import matplotlib.pyplot as plt
import numpy as npdef softmax(x, T):x = np.exp(x / T)return x / x.sum()if __name__ == '__main__':x = np.arange(4)origin = np.array([0.1, 0.4, 0.3, 0.2])temperatures = [1, 5, 50, 0.5, 0.05]total_width, n = 0.8, len(temperatures)width = total_width / nx = x - (total_width - width) / 2for i, temperature in enumerate(temperatures):plt.bar(x + i * width, softmax(origin, temperature), width=width, label=f'T={temperature}')plt.legend()plt.show()不确定度
Expected Radial Error (ERE)
E R E σ l = ∑ i = 1 w ∑ j = 1 h σ l ( i , j ) ( i − x ~ ) 2 + ( j − y ~ ) 2 E R E_{\sigma_l}=\sum_{i=1}^w \sum_{j=1}^h \sigma_l(i, j) \sqrt{(i-\tilde{x})^2+(j-\tilde{y})^2} EREσl=i=1∑wj=1∑hσl(i,j)(i−x~)2+(j−y~)2
其中 ( x ~ , y ~ ) \left(\tilde{x}, \tilde{y}\right) (x~,y~)是预测landmark坐标
σ l ( i , j ) \sigma_l(i, j) σl(i,j)是heatmap,但是需要预处理一下
去除了小于最大值 5 % 5\% 5%得点,然后通过除以总和进行归一化
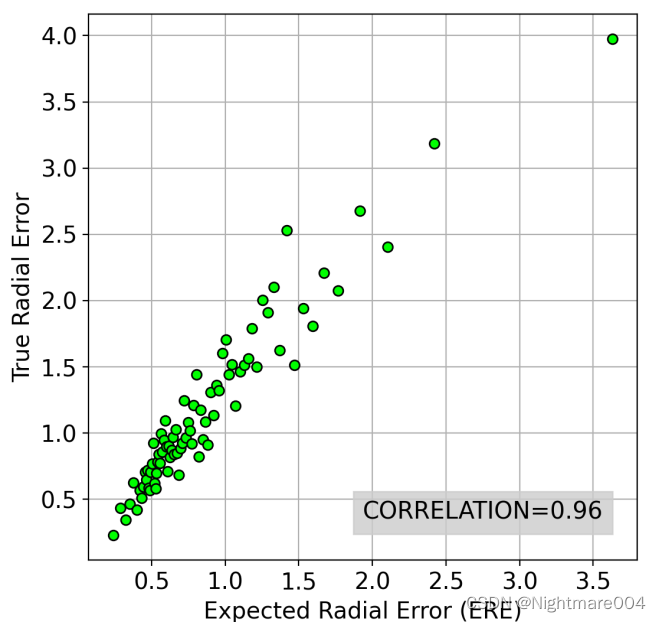
下面作者通过实验,表明ERE和径向误差(预测landmark到真实landmark的距离)是有关系的
验证
Reliability Diagrams
下面说的landmark的置信度指的是对应的heatmap的最大值
设置信度的最大值为 M M M(这里最大值指的是所有图片所有landmark的置信度)
根据 M M M分成10个桶(bin),每个桶长度为 M 10 \frac{M}{10} 10M
将所有图片所有landmark划分到对应的桶
每个桶的平均置信度就是landmark的平均置信度
一个landmark如果和真实的landmark完全重合,则称为预测正确
每个桶的正确率就是预测正确的比例
(其实想完全重合基本不可能,所以代码里是 < = p i x e l _ s i z e 2 π = ( 1935 640 × 0.1 ) 2 π <=\sqrt{\frac{pixel\_size^2}{\pi}}=\sqrt{\frac{(\frac{1935}{640}\times 0.1)^2}{\pi}} <=πpixel_size2=π(6401935×0.1)2)
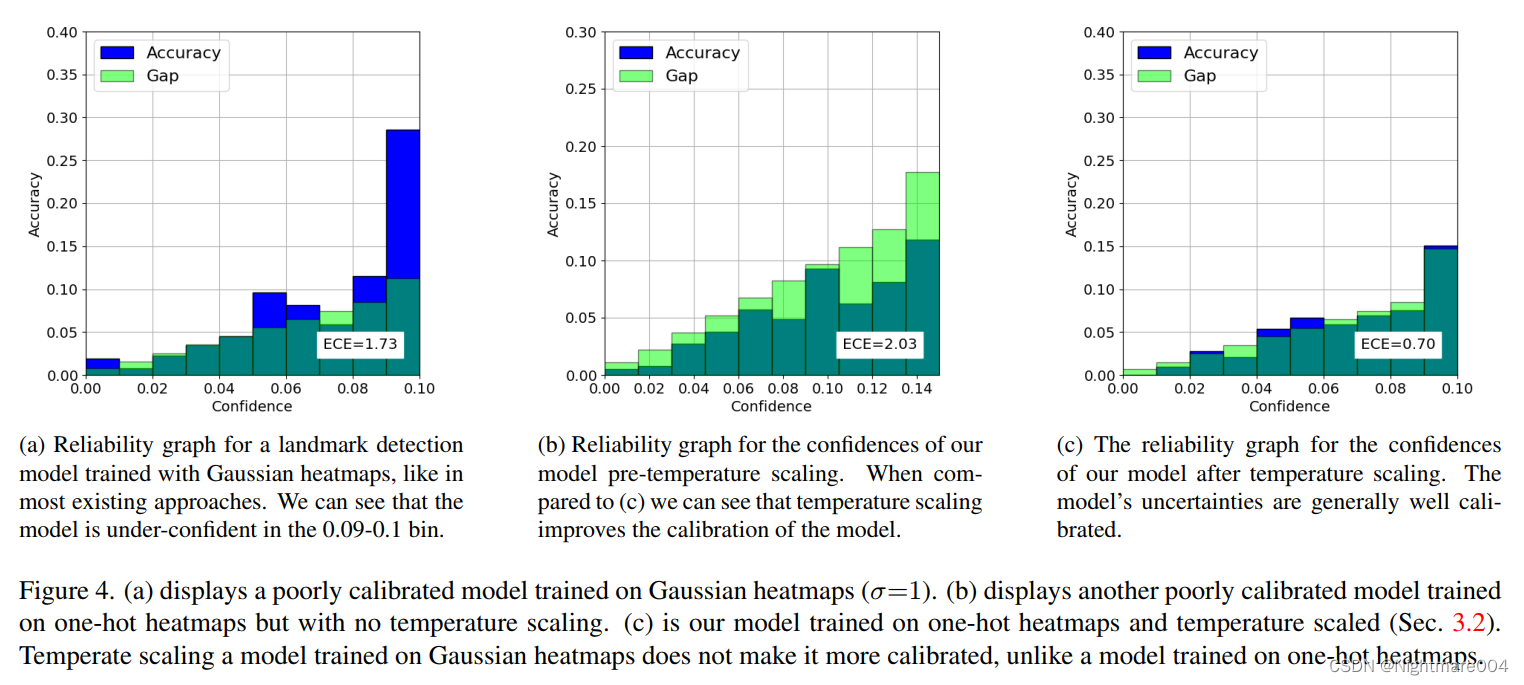
Expected Calibration Error (ECE)就是每个桶正确率和平均置信度的差值的绝对值的期望
E C E = E [ ∣ a c c − c o n f i d e n c e ∣ ] ECE = \mathbb{E}\left[\left|acc-confidence\right|\right] ECE=E[∣acc−confidence∣]
如果一个模型预测的完美校准(perfectly calibrated),那么正确率和平均置信度一样(这句话我也没理解)
通过temerature scaling,作者把ECE从2.03降到了0.70
ERE
作者想表明ERE和径向误差是相关的
针对所有图的所有landmark,按照ERE排序,每36个代表图上的一个点,然后算皮尔逊
能看得出来这里几乎正相关
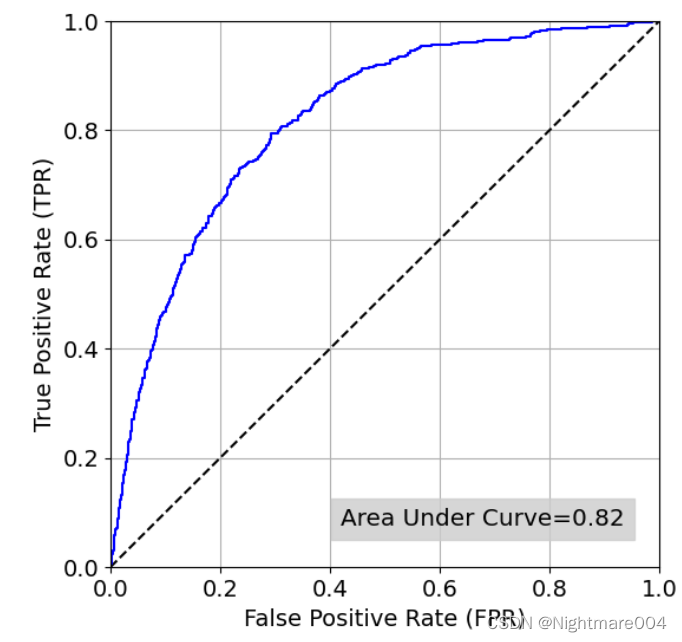
通过ERE来区分预测的准确性
通过ERE设定一个阈值来判断一个landmark是否不准确/错误(inaccurate / ‘erroneous’)
1.在测试集1使用模型得到heatmap
2.找到每张heatmap的最大值,作为预测的landmark,然后计算ERE
3.计算径向误差,<2mm就是good, >2mm就是erroneous
4.画ROC曲线,其中真阳性(true positive)就是ERE>阈值 且 真实径向误差>2mm,
假阳性(false positive)就是ERE>阈值 且 真实误差<2mm
最后选定真阳性率(true positive rate)为0.5的阈值作为设定的阈值
论文里是1.414,也就是说,如果ERE>1.414,就认为这是erroneous
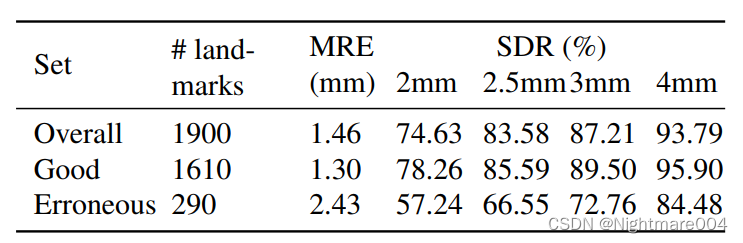
在测试集2上利用这个阈值来判断一个landmark的准确性
最后确实good的landmark更加准确
这篇关于Contour-Hugging Heatmaps for Landmark Detection阅读笔记的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








