本文主要是介绍论文研读“A Method for PET-CT Lung Cancer Segmentation based on Improved Random Walk”,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
基于改进的随机游走的PET-CT肺癌分割方法
摘要
首先,通过使用区域增长和数学形态学对PET图像进行预分割来获得初始轮廓。初始轮廓可以用于自动获得PET和CT图像上随机游走所需要的种子点,同时,它们也可以用作CT图像上随机游走的约束,以解决肿瘤区域的缺点。如果未增强CT图像,则CT图像不明显。由于CT提供了有关解剖结构的必要细节,因此CT的解剖结构可用于提高PET图像上随机游走的权重。最后,对在PET和CT图像上随机游走获得的相似度矩阵进行加权,以在PET和CT图像上获得相同的结果。
随机游走
随机游走将图像I={X1,X2,……,Xn}映射到一个无向图G(V,E)中,其中图中的每个属于V的节点vi表示图片中的每个像素。eij是vi和vj之间的边,带有权重w。(V代表图像中的每个像素,E是像素v和它的相邻像素之间的边,权重w代表随机游走经过这条边的可能性。)权重函数如下所示:

随机游走算法需要交互式输入种子,图中的节点可以分为两组。一组是由用户定义的那些节点,另一组是未知节点。分割问题是计算所有未标记种子到标记种子点的概率。所求概率和 组合的Dirichlet问题有相同的解。Dirichlet等式如下所示:

其中x表示为每个体素的概率,L表示组合拉普拉斯矩阵。矩阵表示为

其中di是vi所有相邻节点权重的和。随机游走把所有节点分为两组,所以拉普拉斯矩阵也可以写为:
Lm表示标记节点的权重矩阵,Ln表示未标记节点的权重矩阵,B表示标记节点和未标记节点之间的权重矩阵。经过一系列的运算,Dirichlet积分的最优解可以表示为:

其中X是所需的概率矩阵。基于相似度概率矩阵,我们可以获得最终的分割结果。
提出的方法
预处理
首先,使用三次B样条插值器对PET图像进行上采样,以使PET和CT图像具有相同的分辨率。其次,使用刚性变换将PET图像与CT图像对齐。仿射配准是医师经常用于肿瘤体积的PET-CT描绘的方法,为简单起见,我们选择在本研究中使用仿射转化[14],[15]。
种子定位算法
基于区域增长和数学形态学的自动播种算法。在本文中,我们选择生长区域以进行预分割以获得肿瘤的初始轮廓。我们选择区域生长而不是固定的阈值的原因是为了避免分割泄漏到具有类似PET示踪剂摄取的周围组织中。
种子定位算法步骤如下:
- 选择SUV值最大的像素点作为区域增长的初始种子点。
- 在初始种子点附近的8个方向上搜索满足以下条件的邻近点。

该标准是根据当前的知识经验设置的。根据现有知识,SUV高于最高SUV的50%的体素很可能属于肿瘤。 - 如果种子点的特性不满足上述等式,则区域生长完成。获得的分割结果需要处理数学形态以获取初始肿瘤。(也就是,当种子点的8个方向都没有SUV>50%SUVmax的像素时,区域增长完成。)
- 使用伪蒙特卡洛算法在初始轮廓中选择前景种子点。
- 搜索每个前景种子点的8个邻域,以选择满足以下公式的那些点作为背景种子。

当我们获取PET图像的前景和背景种子时,将这些种子映射到CT图像上以获得CT图像的种子。
CT图像上的随机游走
CT图像通常提供足够的器官和组织结构信息,但很少提供功能信息。在未增强的CT图像上,很难将肿瘤区域与正常区域区分开。从合并的PET-CT扫描仪获取的CT图像通常不会被增强。随机行走很难从非增强型CT获得准确的肿瘤区域,因此我们对CT图像的随机行走增加了约束。通过种子定位算法的预分割获得的初始肿瘤轮廓被视为约束,随机游走器在约束内行走的概率大于外部区域。
在预处理之后,PET和CT图像被视为已在图像中的像素之间实现了一对一的对应关系。因此,将在PET图像上获得的初始轮廓映射到CT图像上。在初始轮廓中,随机助步器以正常的重量行走,初始轮廓之外的区域可能属于病变区域,但是随机助步器穿过这些区域的概率应小于初始轮廓。在本文中,我们用最小的包围圈包围初始轮廓,在最小的包围圈里但在初始轮廓外的区域被认为是可疑病变区域。计算可疑病变区域内两个相邻节点与初始轮廓的中心之间的欧几里得距离,取较小的值与最小圆周圆半径相除得到的值作为两个相邻节点之间的边权重。最小包围圆之外的区域被视为正常区域,该区域的权重设置为0.01,之所以不设置为0,是为了防止无解地求解拉普拉斯矩阵奇点的过程。
约束函数具有以下形式:

其中E是在CT图像上绘制的初始轮廓,C表示最小的封闭圆。gama表示添加的约束项,它采用下式计算:
其中r是最小包围圆的半径,p表示相邻节点和初始轮廓中心之间的较小欧几里得距离:

其中O表示初始轮廓的中心,vi和vj表示位于初始轮廓中的相邻节点。
PET图像上的随机游走
由于PET图像的分辨率较低,部分体积效应比CT图像更为严重。 PET图像上的肿瘤区域通常是异质的。 PET图像上的肿瘤位置清晰,但肿瘤轮廓模糊且不清楚,CT图像通常提供详细的解剖信息。因此,我们提取了CT图像的梯度信息并将其映射到PET图像上,以提高随机行走的权重:

vi表示PET图像中的SUV值,gi是从CT图像中提取的梯度特征。
相似度矩阵的权重
对从PET图像上的随机游走获得的概率矩阵和从CT图像上的随机游走获得的概率矩阵进行加权,以获得最终概率矩阵,可以过根据最终矩阵完成分割。
两个参数分别是PET和CT图像上随机游走矩阵的权重。
结果
数据集
肺肿瘤患者的14张PET-CT图像。
比较方法
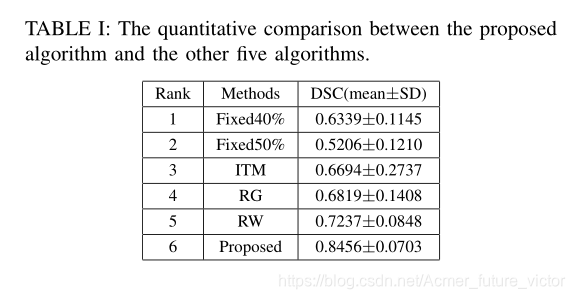
为了评估该方法的性能,我们将其与其他方法进行了比较,包括:1)PET上的最大SUV阈值的40%(称为固定40%),2)PET上的最大SUV阈值的50%(称为SUV固定为50%),3)PET上的迭代阈值方法(称为ITM)[17],4)PET上的区域生长方法(称为RG)[18],5)PET上的随机游走方法(称为RW)[12]。由于CT图像中的肿瘤区域不清楚,因此这5种方法的比较结果就是PET图像上的分割结果。
评价指标
Dice系数和hausdorff距离。
参数设置
α=0.6,β=0.4.
都设置为0.5。
实验结果比较
这篇关于论文研读“A Method for PET-CT Lung Cancer Segmentation based on Improved Random Walk”的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








![[论文笔记]LLM.int8(): 8-bit Matrix Multiplication for Transformers at Scale](https://img-blog.csdnimg.cn/img_convert/172ed0ed26123345e1773ba0e0505cb3.png)
