本文主要是介绍apollo云实验:定速巡航场景仿真调试,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
定速巡航场景仿真调试
- 概述
- 启动仿真环境
- 仿真系统
- 修改默认巡航速度
- 实验目的
- 福利活动
主页传送门:📀 传送
概述
自动驾驶汽车在实现落地应用前,需要经历大量的道路测试来验证算法的可行性和系统的稳定性,但道路测试存在成本高昂、极端交通场景复现等各种各样的问题。
想象一下当你发现了一个新的算法,但还不确认它是否有效,你是否会直接找一辆自动驾驶汽车,更新软件,并且进行测试呢?这样做可能并不安全,你必须把所有的场景测试一遍以保证它足够好,这可需要大量的时间。仿真的好处显而易见,它通过软件模拟来发现和复现问题,而不需要真实的环境和硬件,可以极大的节省成本和时间。
随着现在深度学习的兴起,仿真在自动驾驶领域有了新的用武之地。自动驾驶平台通过仿真采集数据,可以把训练时间大大提高,远远超出路测的时间,加快模型迭代速度。先利用集群训练模型,然后再到实际的路测中去检验,采用数据驱动的方式来进行自动驾驶研究。
仿真系统通过模拟各种交通场景生有效的实现了车辆在仿真系统下日行百万公里的测试,为自动驾驶系统开发提供了大量的数据支撑。
Sim_Control是Apollo软件交互系统Dreamview提供的仿真组件。
Sim_control通过模拟Chassis、Localization、Perception、Obstacle等信息输入,实现对routing、planning等算法模块的仿真调试,同时Apollo提供了PnC Monitor、Cyber Monitor等系统调试工具,可以实时的监控各模块运行数据,有效提升开发者对自动驾驶软件算法的学习与调试。
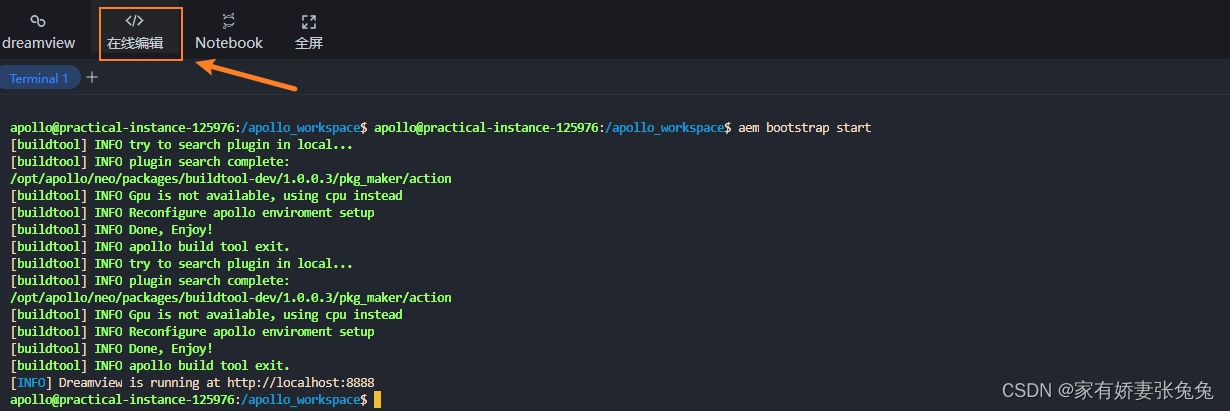
启动仿真环境
aem bootstrap start
运行成功如下图所示:
2. 单击上方 Dreamview 按钮进入 Dreamview 界面:
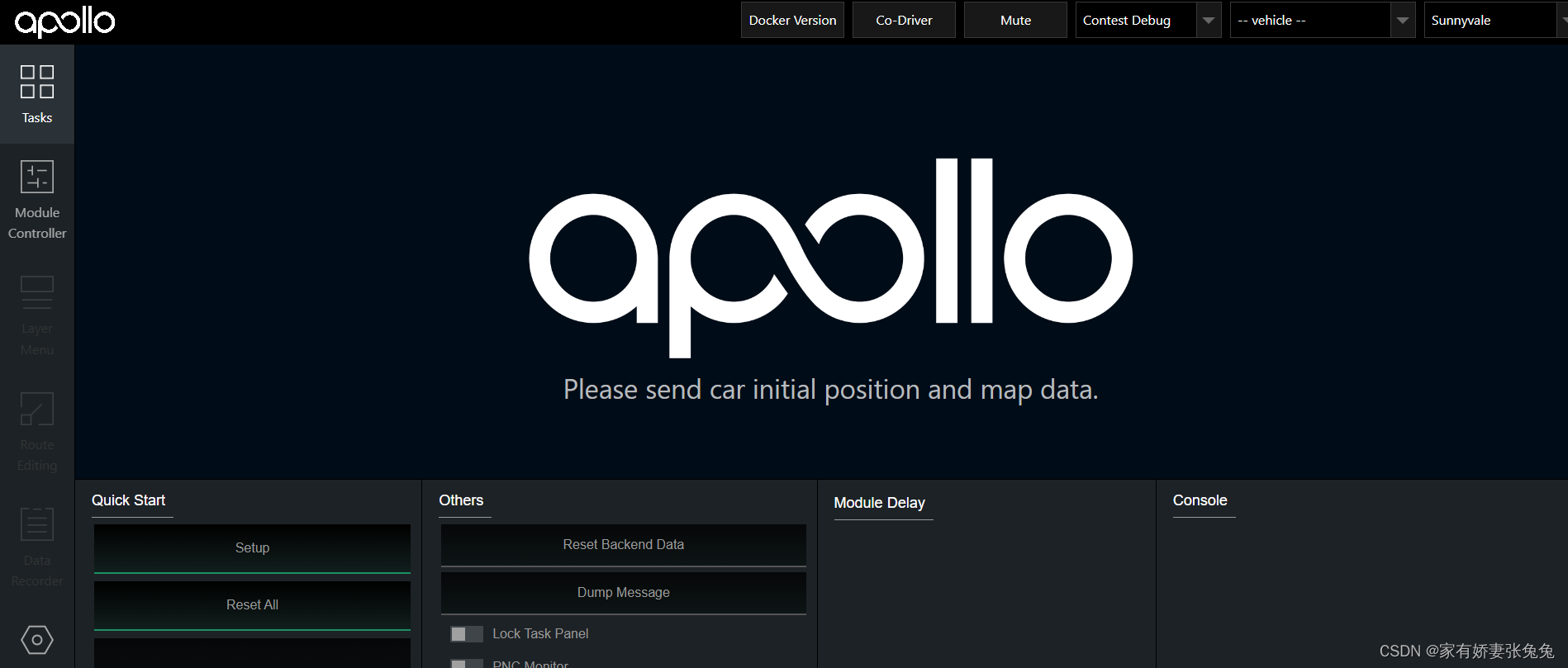
- DreamView 运行成功界面
仿真系统
-
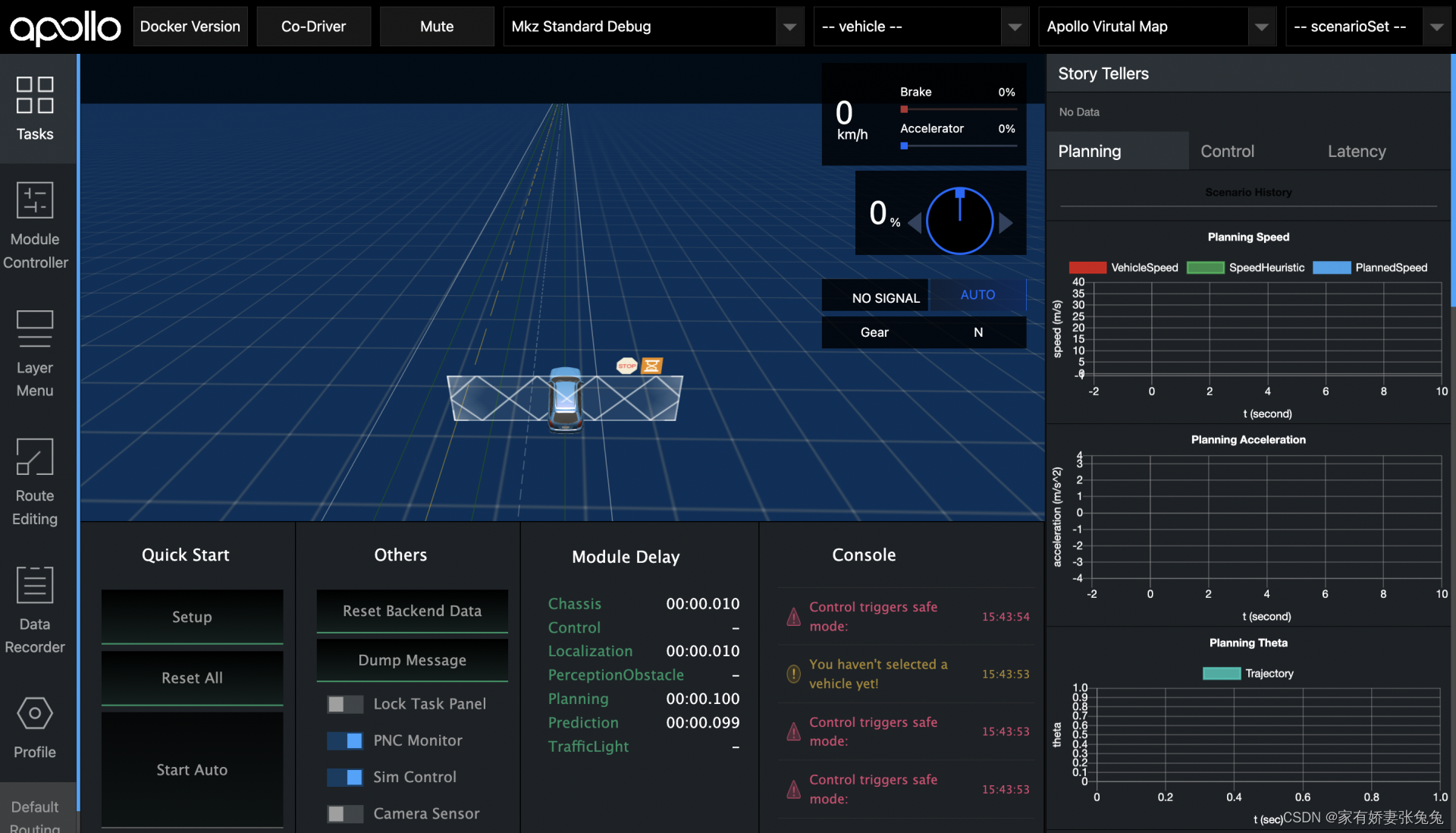
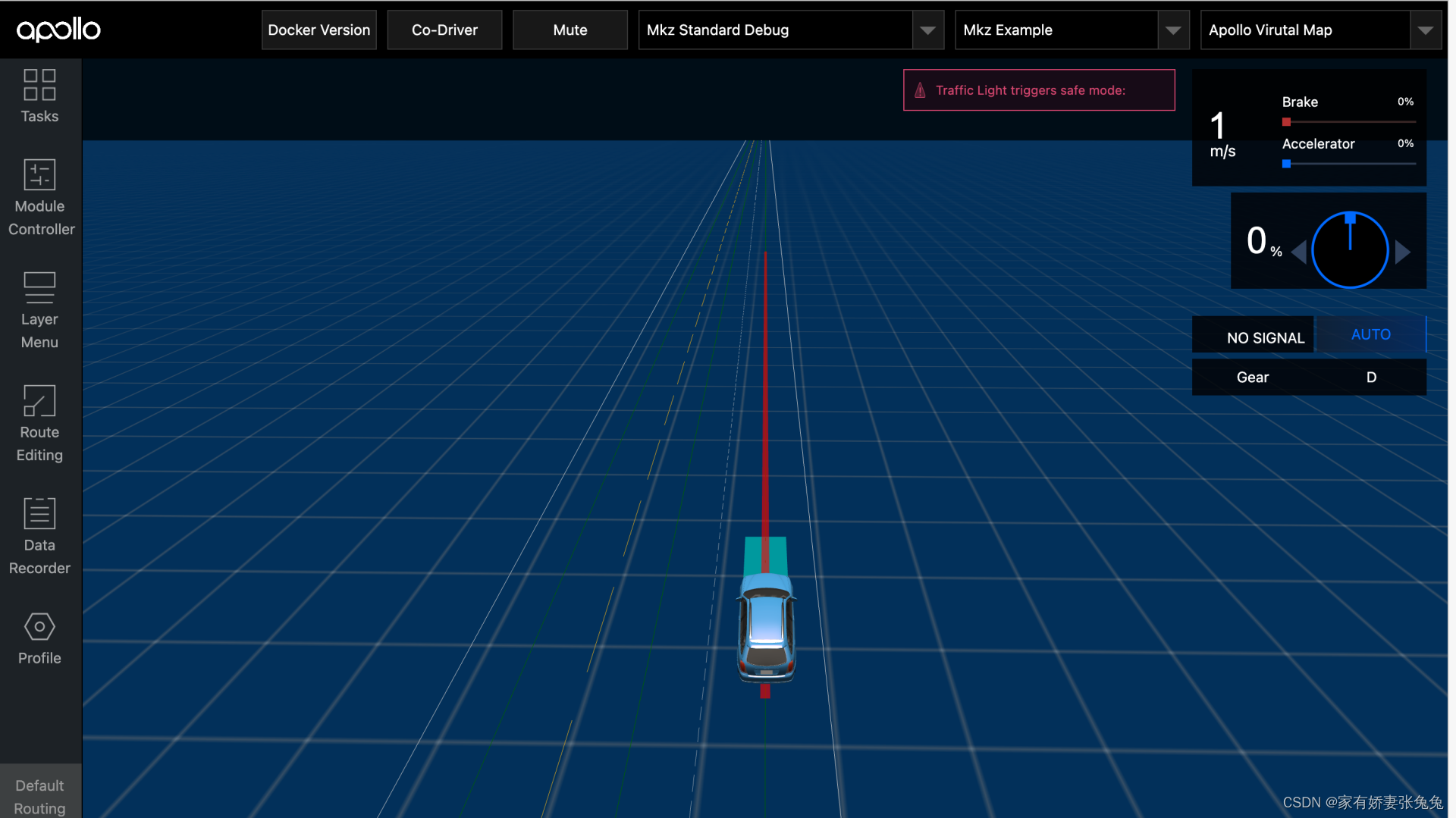
模式选择Mkz Standard Debug,地图选择Apollo Virutal Map,打开Sim_Control模式,打开PNC Monitor,等待屏幕中间区域出现Mkz车模型和地图后即表示成功进入仿真模式。
-
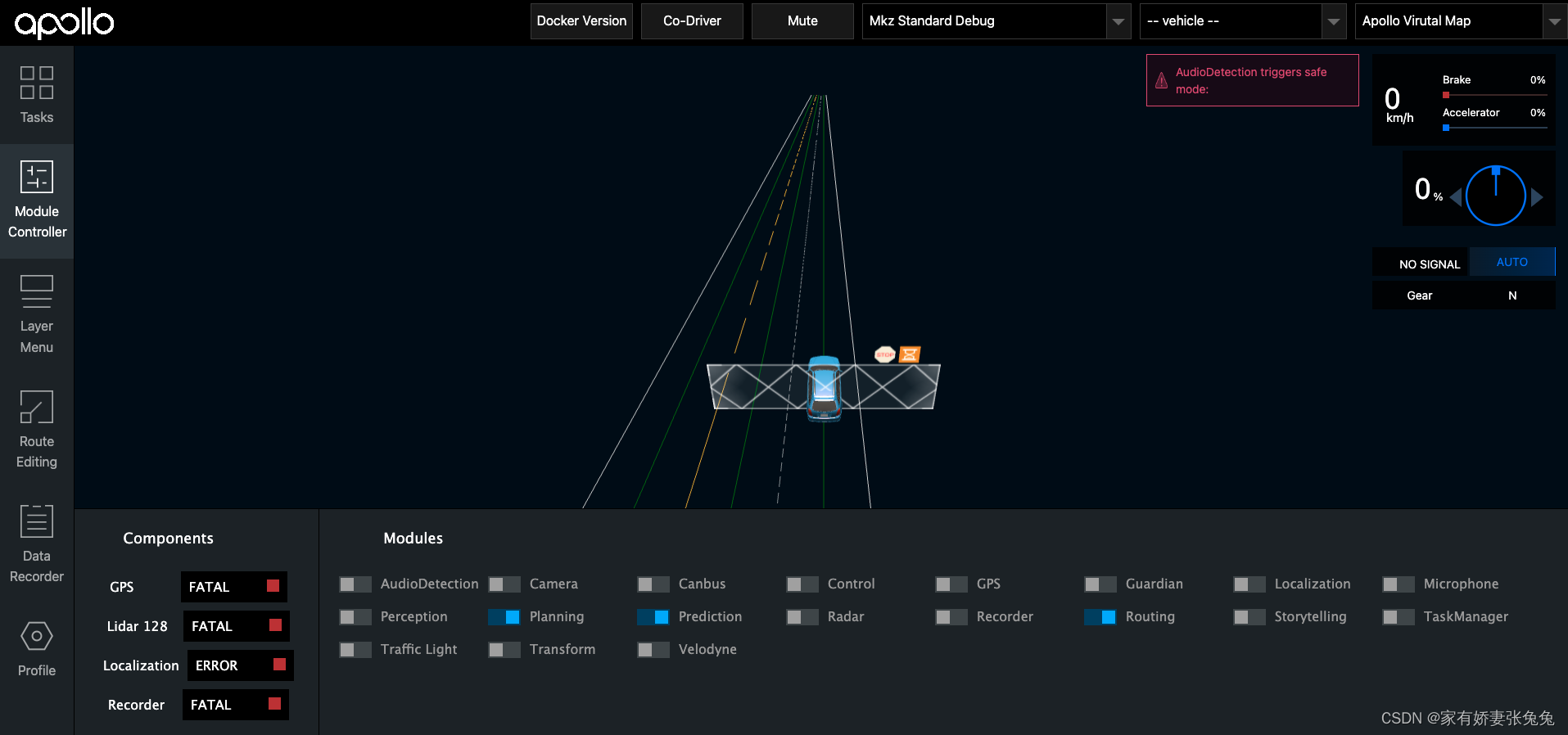
点击左侧Tab栏Module Controller,启动Planning,Prediction,Routing模块
-
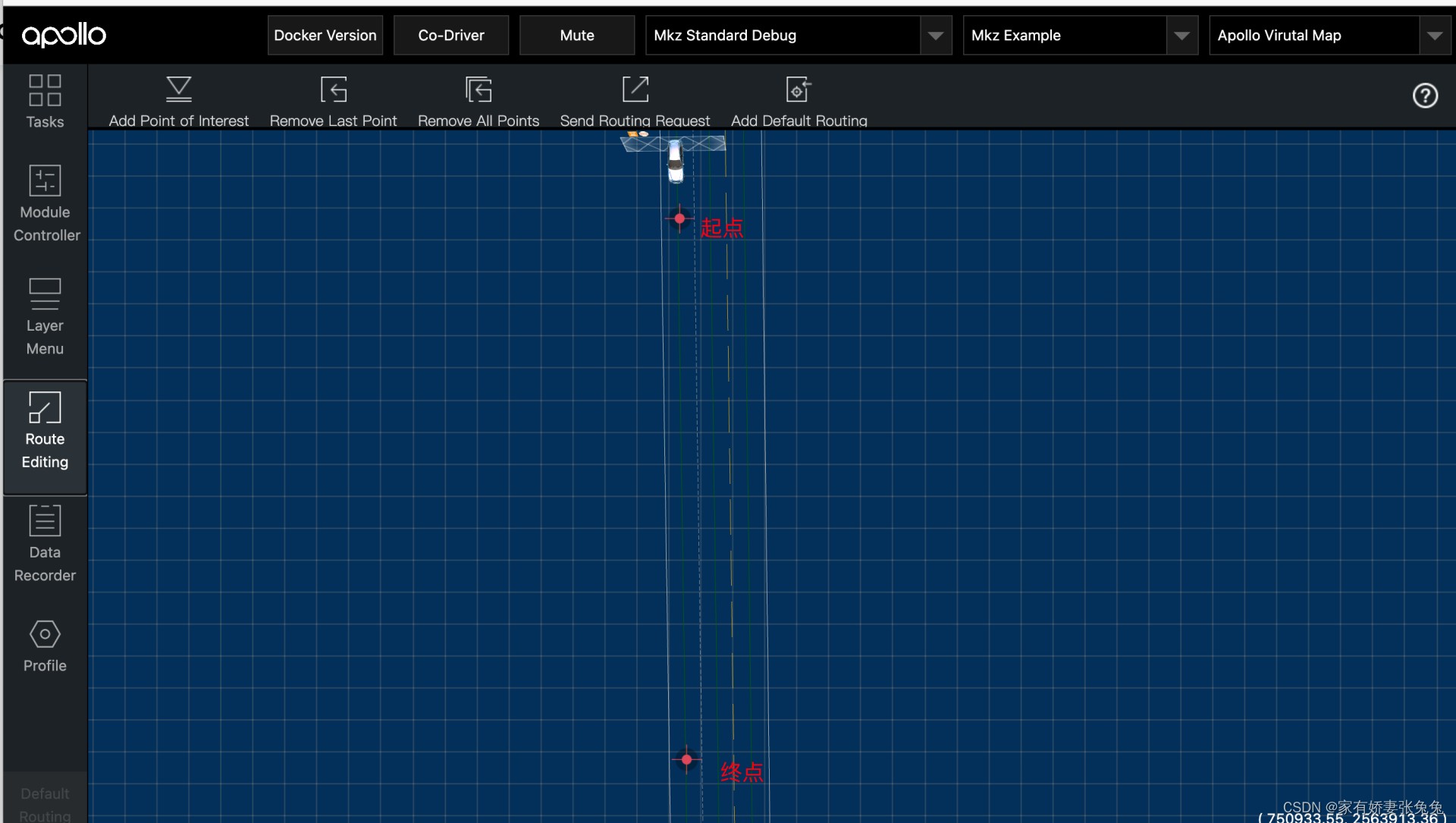
模块启动完成后,点击左侧Tab栏Route Editing,拖动、点击鼠标可以在地图中设置车辆行驶路径(起点-终点)。
-
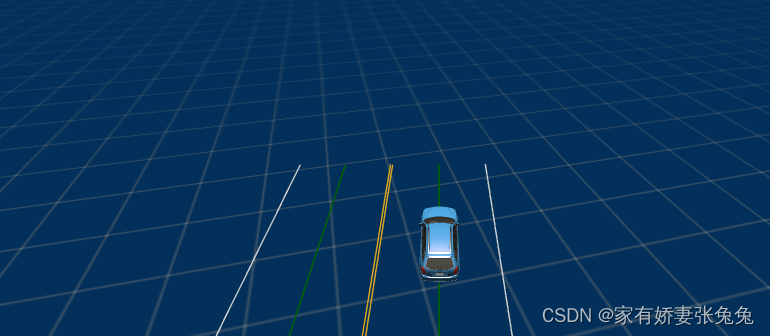
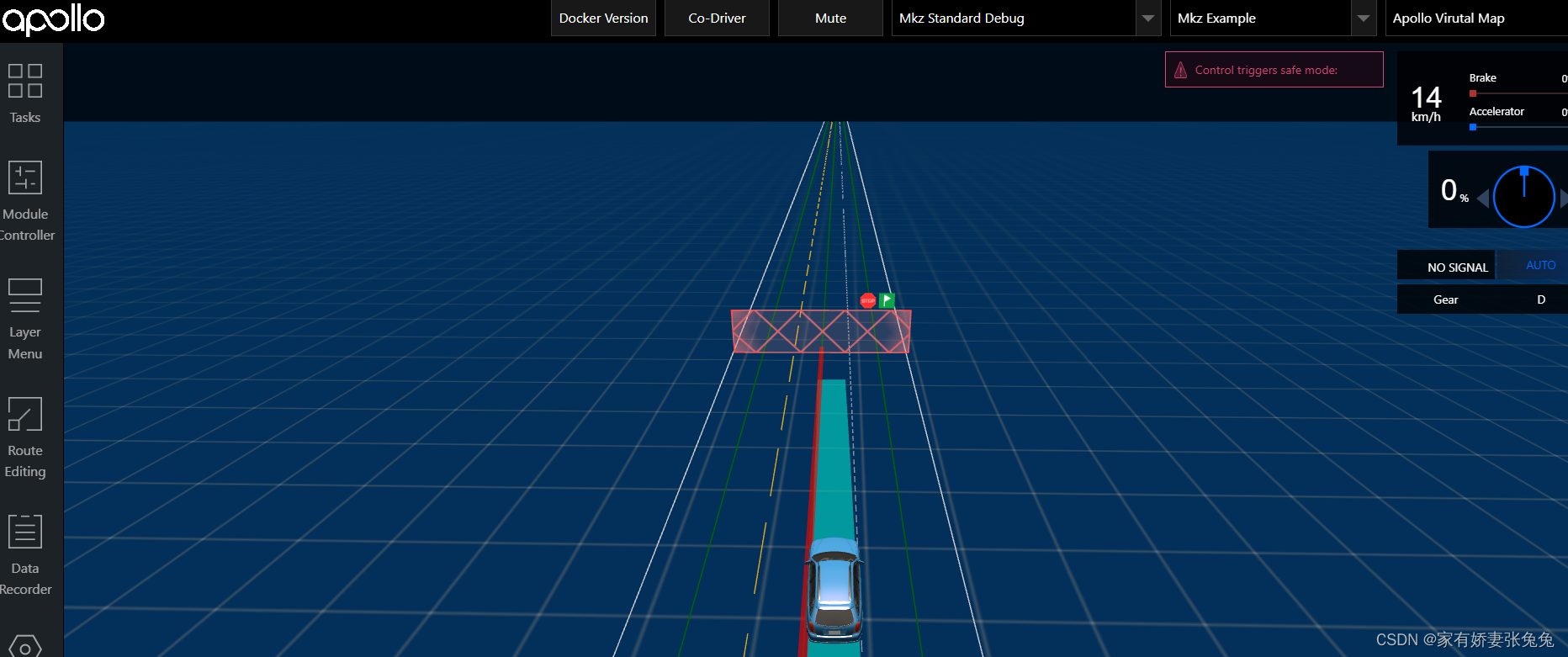
当点位设置完成后,点击Send Routing Request,车辆就会动起来了,红线是routing模块在地图中搜索出的路径,浅蓝色的轨迹是planning模块实时规划的局部路径,此时观测巡航速度发现最高可达到40km/h。
修改默认巡航速度
apollo/modules/planning/conf下存放了planing相关的配置文件,其中planning_upper_speed_limit表示Planing的上限速度,default_cruise_speed表示默认巡航速度。
-
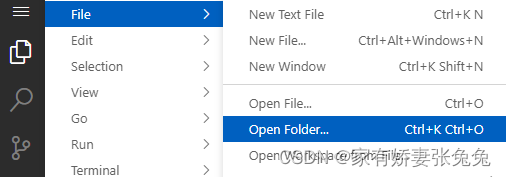
打开云实验平台的在线编辑器
-
点击File > Open Folder, 选择进入/apollo目录。
-
打开/apollo/modules/planning/conf目录下的planning.conf文件,如下图所示将default_cruise_speed修改为1.00,点击保存。
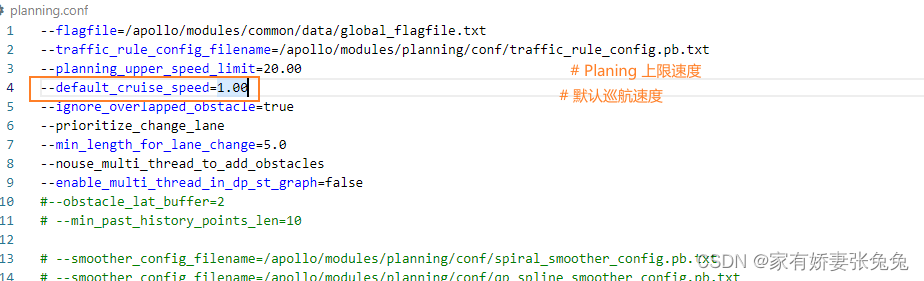
-
修改好代码参数后,保存这个文件,在Module Controller中重启planning模块(让系统重新加载Planing参数),重新发送routing request即可看到车辆巡航速度已经变为3.6km/h了。
**注:**PNC monitor上显示的速度单位为km/h,planning.conf配置文件中的速度单位为m/s。
实验目的
- 熟悉Apollo软件系统的启动方法,掌握Dreamview交互系统使用。
- 熟悉Apollo软件系统工作流程,掌握系统调试工具的Cyber_monitor使用
- 掌握通过Sim_Control模块对Apollo软件代码的仿真调试方法
福利活动
加入课程

Apollo开发者社区 观看课程学习apollo
课程进度可以拖动 几秒就能完成。
学完填表选心仪的奖品领奖就行
表单填写
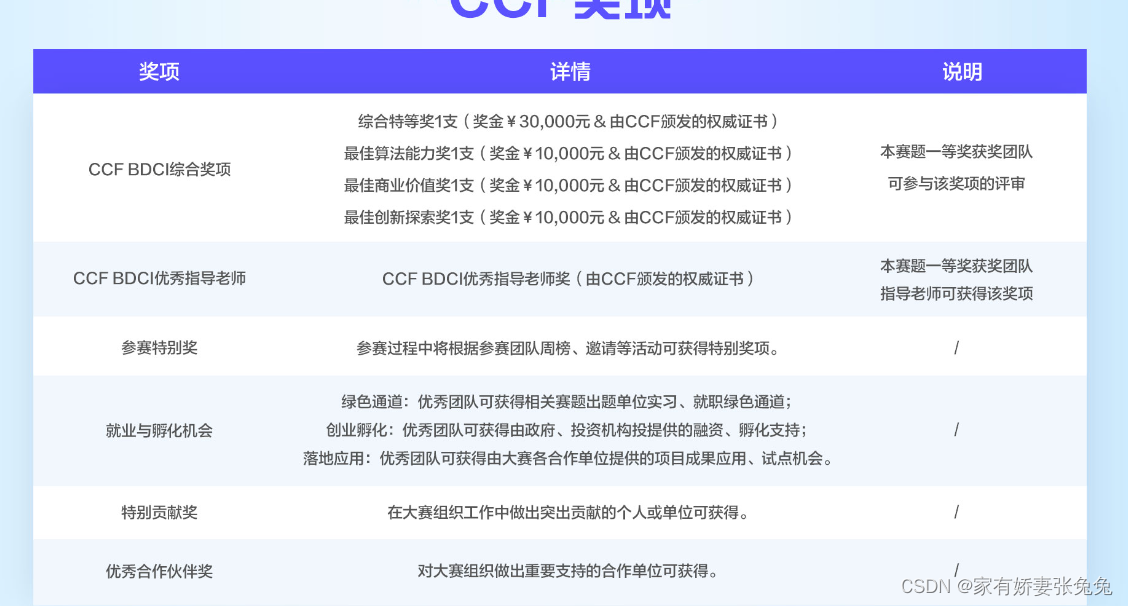
另有赛事活动奖品:
CCF赛事

这篇关于apollo云实验:定速巡航场景仿真调试的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




