本文主要是介绍机器人基础知识(1.2-1.2.1)三维空间位姿描述(旋转),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
三维情况是上一节的二维情况(二维空间位姿描述)的延伸。在二维坐标系上增加一个额外的坐标轴即可,通常用z表示,它同时与x轴和y轴正交。z轴的方向服从右手规则,并构成右手坐标系。与各坐标轴平行的单位向量记作 x ^ \hat{x} x^、 y ^ \hat{y} y^和 z ^ \hat{z} z^:
z ^ = x ^ × y ^ , x ^ = y ^ × z ^ , y ^ = z ^ × x ^ \hat{z}=\hat{x}\times\hat{y},\hat{x}=\hat{y}\times\hat{z},\hat{y}=\hat{z}\times\hat{x} z^=x^×y^,x^=y^×z^,y^=z^×x^
坐标系中的一个点P可用其x,y和z的坐标值(x,y,z)或者一个约束向量表示:
P = x x ^ + y y ^ + z z ^ P=x\hat{x}+y\hat{y}+z\hat{z} P=xx^+yy^+zz^
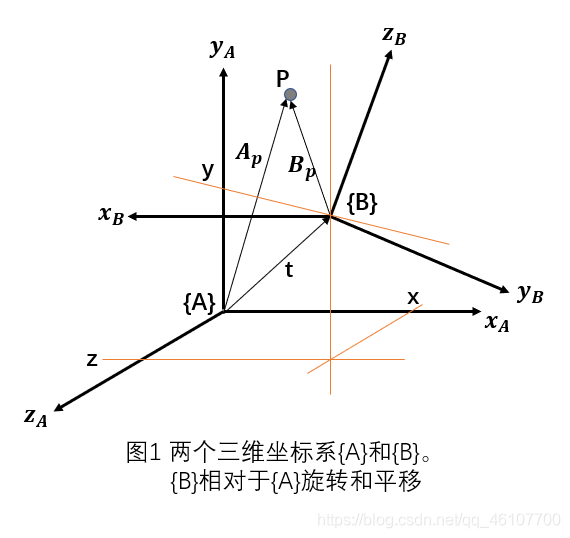
图1 展示了一个相对于参考坐标系{A}的坐标系{B}。显然,{B}的原点通过向量t=(x,y,z)进行平移,然后再通过某种复杂的方式进行旋转。做法还是同前面一样,从任意一点P出发,然后再确定 A p {^A}p Ap和 B p {^B}p Bp之间的关系。仍然是两方面考虑:旋转和平移。
1.2.1 三维空间姿态描述
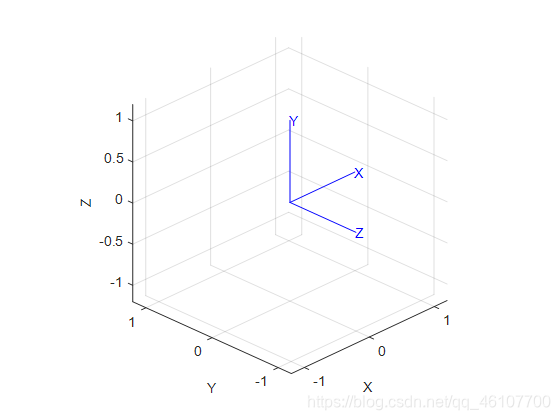
图1中显示了两个右手坐标系,其方向差异很大,将坐标系{A}旋转,直到与坐标系{B}方向一致。首先考虑绕单个坐标轴的旋转。下图所示显示了一个右手坐标系,以及它绕不同坐标轴旋转不同角度的情形。

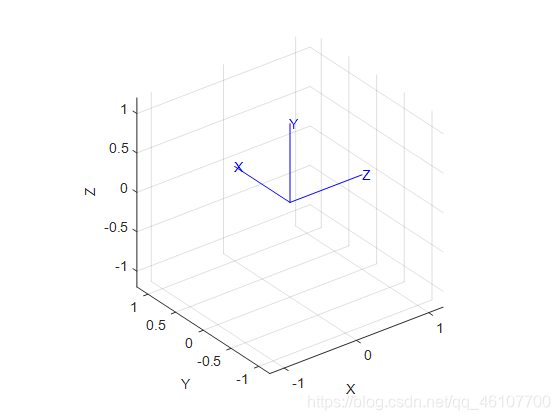
但绕坐标轴连续旋转就没那么简单了,下图演示了一个坐标系按不同的顺序旋转的情形,可以看到虽然旋转角度相同,但最终的坐标系完全不同,它取决于旋转的顺序。

目前有很多种表示旋转的方法,后面将会介绍几种:正交旋转矩阵,欧拉和卡尔丹角,旋转轴与角度,以及单元四位数。他们都可以表示为向量或矩阵,即MATLAB的自然数据类型,或者表示为一个工具箱自定义的类。
1.2.1.1正交旋转矩阵
用相对于参考坐标系的坐标轴单位向量表示它们所在坐标系的方向。每个单位向量有三个元素,他们组成了 3 × 3 3\times3 3×3阶正交矩阵 A R B {^A}R_B ARB:
( A x A y A z ) = A R B ( B x B y B z ) \begin{pmatrix} {^A}x \\ {^A}y \\ {^A}z\\ \end{pmatrix}={^A}R_B\begin{pmatrix} {^B}x \\ {^B}y \\ {^B}z\\ \end{pmatrix} ⎝⎛AxAyAz⎠⎞=ARB⎝⎛BxByBz⎠⎞
上式将一个相对坐标系{B}的向量旋转为相对于坐标系{A}的向量。矩阵R属于属于特殊三维正交群。它具有正交矩阵的性质,如 R T = R − 1 R^T=R^{-1} RT=R−1以及 d e t ( R ) = 1 det(R)=1 det(R)=1。
分别绕x,y,z轴旋转 θ \theta θ角后的标准正交矩阵可表示为:
R x ( θ ) = ( 1 0 0 0 cos θ − sin θ 0 sin θ cos θ ) R_x(\theta)=\begin{pmatrix} 1&0&0\\0&\cos\theta&-\sin\theta\\0&\sin\theta&\cos\theta \end{pmatrix} Rx(θ)=⎝⎛1000cosθsinθ0−sinθcosθ⎠⎞
R y ( θ ) = ( cos θ 0 sin θ 0 1 0 − sin θ 0 cos θ ) R_y(\theta)=\begin{pmatrix}\cos\theta &0 &\sin\theta\\0&1&0\\-\sin\theta&0&\cos\theta\end{pmatrix} Ry(θ)=⎝⎛cosθ0−sinθ010sinθ0cosθ⎠⎞
R y ( θ ) = ( cos θ − sin θ 0 sin θ cos θ 0 0 0 1 ) R_y(\theta)=\begin{pmatrix}\cos\theta&-\sin\theta&0\\\sin\theta&\cos\theta&0\\0&0&1&\end{pmatrix} Ry(θ)=⎝⎛cosθsinθ0−sinθcosθ0001⎠⎞
- MATLAB程序实现:
- 绕x轴旋转
>>R = rotx(pi/2); #绕x轴旋转π/2
>>trplot(R); #绘制相应的坐标系
>>tranimate(R); #旋转动画,展示了世界坐标系旋转到指定坐标系的过程
R =1.0000 0 00 0.0000 -1.00000 1.0000 0.0000
2. 先绕x轴旋转,再绕y轴旋转。
>>R = rotx(pi/2) * roty(pi/2)
>>trplot(R)
R =0.0000 0 1.00001.0000 0.0000 -0.0000-0.0000 1.0000 0.0000
3. 如果颠倒以上旋转顺序,可以看出旋转的不可交换性
>>R = roty(pi/2) * rotx(pi/2)
R =0.0000 1.0000 0.00000 0.0000 -1.0000-1.0000 0.0000 0.0000
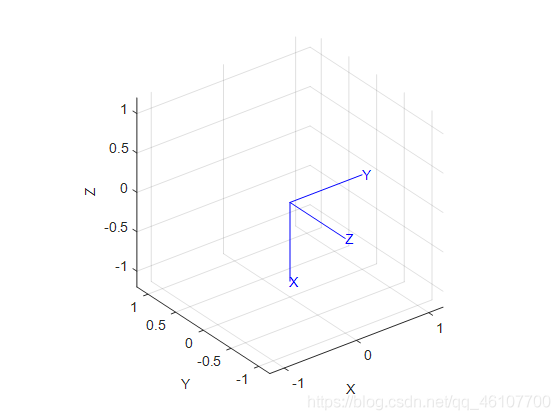
得到的结果完全不同
1.2.1.2 三角度表示法
欧拉旋转定理要求绕3个轴依次旋转,但不能绕同一轴连续旋转两次。旋转顺序分为两种:欧拉式和卡尔丹式。
- 欧拉式:绕一个特定的轴重复旋转,但不是连续的:XYX、XZX、YXY、YZY、ZXZ、或ZYZ。
- 卡尔丹式:绕三个不同的轴旋转:XYZ、XZY、YZX、YXZ、ZXY或ZYX。
一般来说,所有这些序列均被称为欧拉角,共有12种形式可供选择。
ZYZ序列的欧拉角表示为
R = R z ( ϕ ) R y ( θ ) R z ( ψ ) (1) R=R_z(\phi)R_y(\theta)R_z(\psi)\tag1 R=Rz(ϕ)Ry(θ)Rz(ψ)(1)
欧拉角是一个三维向量 Γ = ( ϕ , θ , ψ ) \Gamma=(\phi,\theta,\psi) Γ=(ϕ,θ,ψ)。
例 1:要计算 Γ = ( 0.1 , 0.2 , 0.3 ) \Gamma=(0.1,0.2,0.3) Γ=(0.1,0.2,0.3)的等价旋转矩阵,可以表示为:
>>R = rotz(0.1) * roty(0.2) * rotz(0.3)
>>R = eu12r(0.1, 0.2, 0.3) #两个表达都可
R =0.9021 -0.3836 0.19770.3875 0.9216 0.0198-0.1898 0.0587 0.9801
上述问题的逆命题就是找到给定旋转矩阵的欧拉角:
>>gamma = tr2eul(R)
gamma =0.1000 0.2000 0.3000
但是,如果 θ \theta θ为负时,其反函数结果与原来的数值不同,它返回了一个正的 θ \theta θ值和两个不同的 ϕ 、 ψ \phi、\psi ϕ、ψ值,但这一组欧拉角对应的旋转矩阵仍与前一组是相同的,两组不同的欧拉角对应同一个旋转矩阵,说明从旋转矩阵到欧拉角的映射不是唯一的,而工具箱函数返回的角度始终为正。
>>R = eu12r(0.1, -0.2, 0.3)
R =0.9021 -0.3836 -0.19770.3875 0.9216 -0.01980.1898 -0.0587 0.9801
#反函数结果为
>>tr2eul(R)
ans =-3.0416 0.2000 -2.8416
>>eu12r(ans)
ans =0.9021 -0.3836 -0.19770.3875 0.9216 -0.01980.1898 -0.0587 0.9801
>>R = eul2r(0.1, 0, 0.3)
R =0.9211 -0.3894 00.3894 0.9211 00 0 1.0000
>>tr2eul(R)
ans =0 0 0.4000
对于 θ = 0 \theta=0 θ=0的情况,反函数返回的角度值与原值完全不同。在这种情况下,从式(1)得出的旋转矩阵是
R = R z ( ϕ ) R z ( ψ ) = R z ( ϕ + ψ ) R=R_z(\phi)R_z(\psi)=R_z(\phi+\psi) R=Rz(ϕ)Rz(ψ)=Rz(ϕ+ψ)
由于 R y = I R_y=I Ry=I,所以可简化为只是 ϕ + ψ \phi+\psi ϕ+ψ的一个函数。对于逆运算而言,只能确定这个和的值。要想得到其中每个值,只能按惯例取 ϕ = 0 \phi=0 ϕ=0。 θ = 0 \theta=0 θ=0的情况实际上是一个奇异点。
另一种广泛使用的旋转角顺序是横滚-俯仰-偏航角,即
R = R x ( θ r ) R y ( θ p ) R z ( θ y ) R=R_x(\theta_r)R_y(\theta_p)R_z(\theta_y) R=Rx(θr)Ry(θp)Rz(θy)
它用于描述船舶、飞机和车辆的姿态时非常直观。横滚、俯仰和偏航(也称为倾斜、姿态和航向)是指分别绕x、y、z轴的旋转。这个xyz角序列,即专业上的卡尔丹角,也被称为泰特-布莱恩角或导航角。
例2:对于航空及地面车辆而言,通常定义x轴为前进的方向、z轴垂直向下、y轴指向右手方向。
>>R = rpy2r(0.1, 0.2, 0.3)
R =0.9363 -0.2751 0.21840.2896 0.9564 -0.0370-0.1987 0.0978 0.9752
>>gamma = tr2rpy(R) #反函数结果
gamma =0.1000 0.2000 0.3000
1.2.1.3绕任意向量旋转
对于空间中的两个任意姿态的坐标系,总是可以找到一个旋转轴,使其中一个坐标系绕这个轴旋转可以和另一个坐标系的姿态重合。
>>R = rpy2r(0.1, 0.2, 0.3)
R =0.9363 -0.2751 0.21840.2896 0.9564 -0.0370-0.1987 0.0978 0.9752
>>[theta, v] = tr2angvec(R) #theta是旋转的角度大小,v是绕其旋转的向量
theta =0.3655
v =0.1886 0.5834 0.7900
>>[v, lambda] = eig(R) #求取R矩阵的特征值和特征向量
v =0.6944 + 0.0000i 0.6944 + 0.0000i 0.1886 + 0.0000i-0.0792 - 0.5688i -0.0792 + 0.5688i 0.5834 + 0.0000i-0.1073 + 0.4200i -0.1073 - 0.4200i 0.7900 + 0.0000i
lambda =0.9339 + 0.3574i 0.0000 + 0.0000i 0.0000 + 0.0000i0.0000 + 0.0000i 0.9339 - 0.3574i 0.0000 + 0.0000i0.0000 + 0.0000i 0.0000 + 0.0000i 1.0000 + 0.0000i
一个正交矩阵总有一个实特征值 λ = 1 \lambda=1 λ=1,以及一对共轭复特征值 λ = cos θ ± i sin θ \lambda=\cos\theta\pm{i}\sin\theta λ=cosθ±isinθ,其中 θ \theta θ代表旋转的角度。根据特征值和特征向量的定义有
R v = λ v Rv=\lambda{v} Rv=λv
其中, v v v是对应于 λ \lambda λ的特征向量。当 λ = 1 \lambda=1 λ=1时:
R v = v Rv=v Rv=v
意味着对应的这个特征向量 v v v是不随旋转而改变的。这样的向量只有一个,而旋转就是以这个轴为向量发生的。上面的例子中第三个特征值等于1,所以旋转轴应是矩阵v中的第三列。
这篇关于机器人基础知识(1.2-1.2.1)三维空间位姿描述(旋转)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







