本文主要是介绍Betaflight 4.5 + Aocoda-RC F405V2 + AT32F435 Mark4 试飞初步总结,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Betaflight 4.5 + Aocoda-RC F405V2 + AT32F435 Mark4 试飞初步总结
- 1. 源由
- 2. 试飞
- 3. 问题
- 3.1 图传功率设置异常
- 3.2 图传信号不理想
- 3.3 ELRS915 信号差
- 3.4 RSSI dbm告警
- 3.5 翻滚不太顺手
- 3.6 摄像头色彩异常
- 3.7 磁力计指示方向异常
- 4. 参考资料
1. 源由
开销了一整天的时间,去折腾Betaflight 4.5 + Aocoda-RC F405V2 + AT32F435 Mark4飞控。使用的是最新的代码:
commit 4f17fe0aacf5b8a7813f93c41784fb0b6c57f120 (HEAD -> master-AocodaRC, origin/master-AocodaRC)
Author: Steve Evans <SteveCEvans@users.noreply.github.com>
Date: Mon Oct 23 08:08:07 2023 +0100Disable ICM426XX AFSR feature to prevent stalls (#13132)这个飞控是xFlight开源飞控之AT32F435计划中提到的使用Aocoda-RC F405V2板子,将主控STM32F405RGT6替换为AT32F435RGT7,希望达成两个目的:
- AT32F435RGT7性能上能得到一个飞跃;
- 尝试Betaflight支持AT32F435的最新版本;
2. 试飞
Betaflight 4.5 + AocodaRC F405V2 + AT32F435 Mark4 第一次试飞
3. 问题
3.1 图传功率设置异常
现象:无法正确设置图传功率以及频率,并伴随设置频率后,切换到并非指定的设置频率
验证:更换ATbetaflight 4.3.2 固件测试,功率、频率设置正常
结论:Betaflight 4.5代码Tramp协议相关处理存在BUG
注:详见上面第4个视频JHEMCU_5.8G_40H_1.6W_VTX_power_issue。
3.2 图传信号不理想
现象:模拟图传天线,信号差,雪花点多;50米掉头出现大量雪花点,类似死亡掉头;
怀疑:猪尾巴天线水平后置的安装方法不合适,掉头时,机架遮挡后方天线
注:详见上面第1个视频JHEMCU_5.8G_40H_1.6W_VTX_signal_issue。
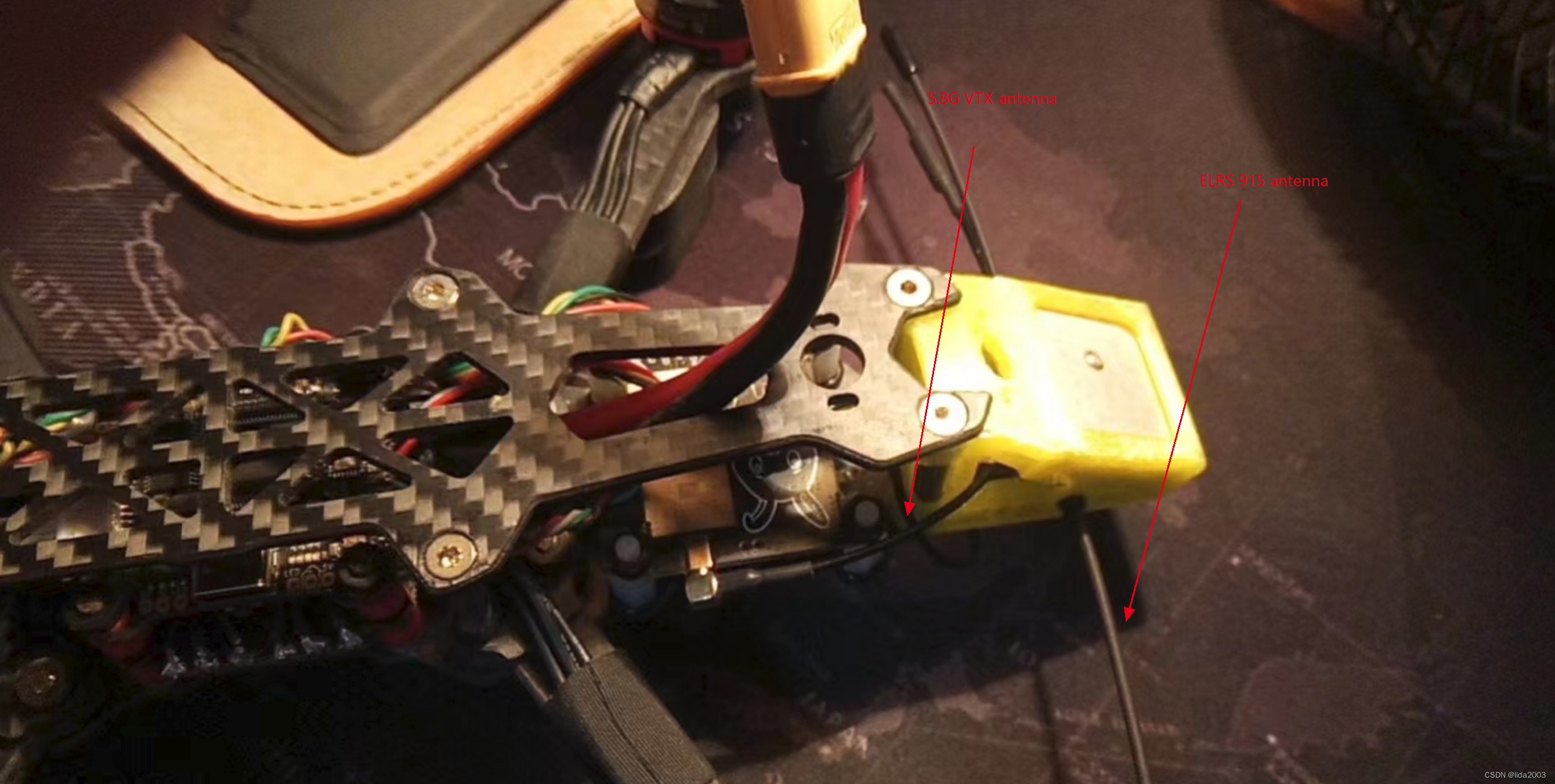
3.3 ELRS915 信号差
现象:OSD大量出现RXLOSS告警
怀疑:硬件模块 nano BetaFPV ELRS915模块 //哪里仿制的杂牌模块
注:详见上面第2、3个视频RSSI_DBM_RXLOSS和RSSI_DBM_RXLOSS._RATE。
3.4 RSSI dbm告警
现象:OSD上显示RSSI dbm告警提示
结论:Betaflight RSSI dbm告警告警阈值调整
注:详见上面第2、3个视频RSSI_DBM_RXLOSS和RSSI_DBM_RXLOSS._RATE。
方法:在CLI命令行获得默认值为-60dmb,ELRS设置为-100dbm比较合适。
# get osd_rssi_dbm_alarm
osd_rssi_dbm_alarm = -60
Allowed range: -130 - 0# set osd_rssi_dbm_alarm = -100
osd_rssi_dbm_alarm set to -100
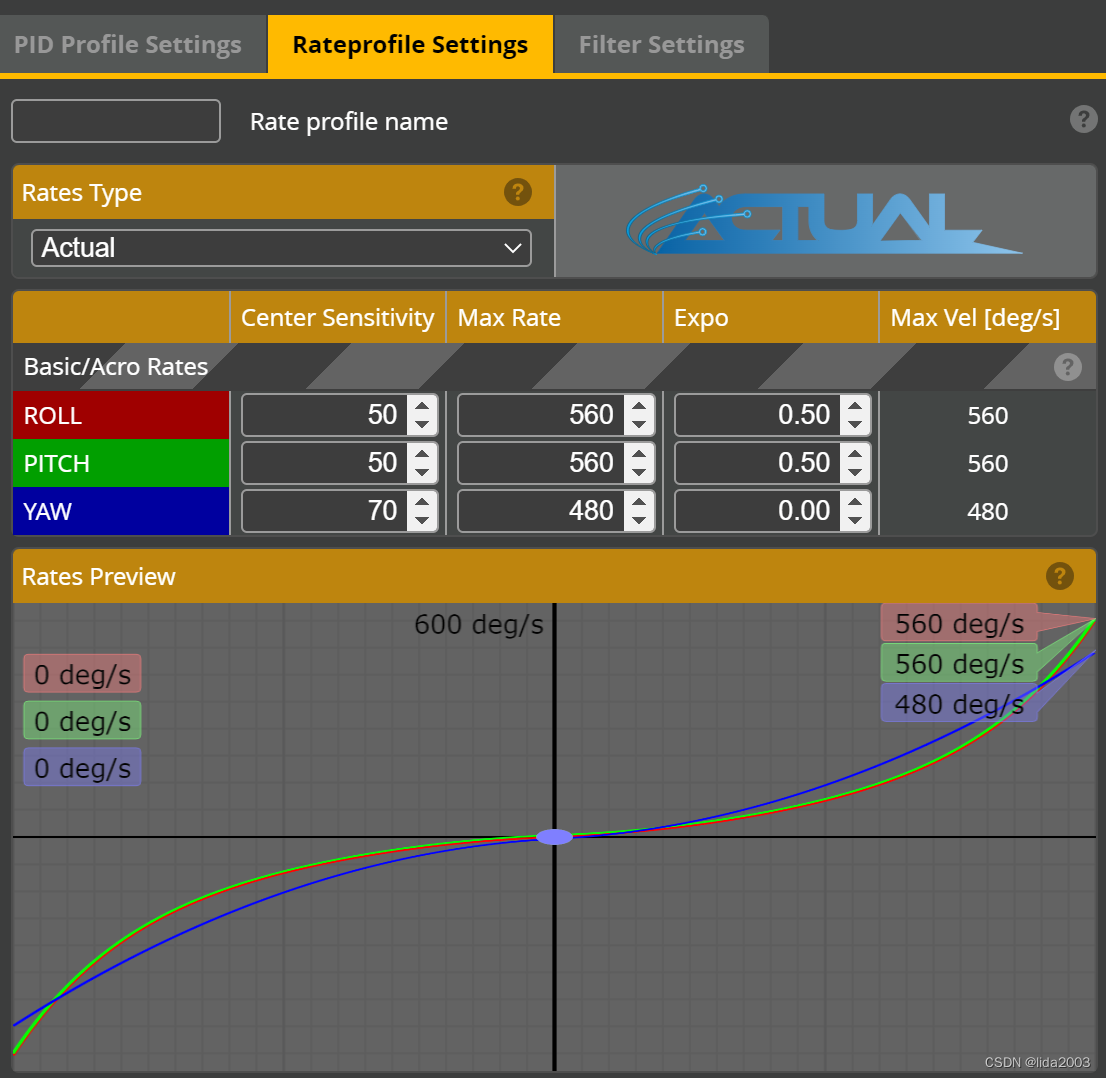
3.5 翻滚不太顺手
现象:整个acro下操作过程感觉有点“过”
结论:默认rate可能相对偏高,需要进行适当调整。
方法:PID页面进行rate调整。
- 默认Betaflight 5寸机设置Rate

- 调整为习惯的Rate值
3.6 摄像头色彩异常
现象:色彩出现严重偏差

结论:摄像头当前设置参数下,视频颜色异常
方法:使用摄像头OSD调参板进行色彩调节。
3.7 磁力计指示方向异常
现象:同一个方向飞行时,磁力计显示机头方向尽然在转,不符合实际情况
结论:BZ251磁力计未进行校准
方法:设置CW0Flip进行校准。
4. 参考资料
【1】xFlight开源飞控之AT32F435计划
这篇关于Betaflight 4.5 + Aocoda-RC F405V2 + AT32F435 Mark4 试飞初步总结的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





