本文主要是介绍BZOJ 2989 数列 —— kd-tree + 旋转坐标系,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
题目链接:点我啊╭(╯^╰)╮
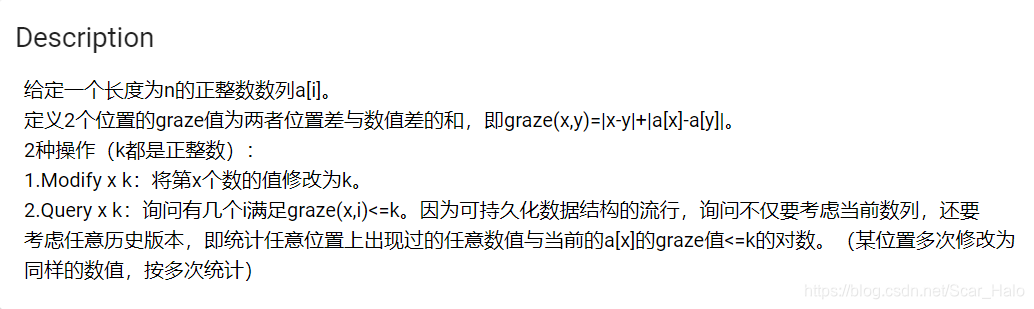
题目大意:
解题思路:
将 ( i , a [ i ] ) (i,a[i]) (i,a[i]) 视为一个点,查询即为曼哈顿距离 ≤ k \le k ≤k 的点数
考虑用 k d − t r e e kd-tree kd−tree 维护,但查询项是一个以 ( i , a [ i ] ) (i,a[i]) (i,a[i]) 为中心的菱形
这样单次查询的复杂度无法保证(但是我测了一下只用了500多ms)
考虑将坐标系旋转 45 ° 45° 45°,菱形就变成了正方形
只需要将点 ( x , y ) (x,y) (x,y) 变成 ( x − y , x + y ) (x-y,x+y) (x−y,x+y)
旋转之后,原坐标系的曼哈顿距离就是新坐标系的切比雪夫距离
这里只需要求一个正方形内的点数即可
测了一下确实快了很多
交题链接
不旋转坐标系:
#include<bits/stdc++.h>
#define rint register int
#define deb(x) cerr<<#x<<" = "<<(x)<<'\n';
using namespace std;
typedef long long ll;
typedef pair <int,int> pii;
const int maxn = 2e5 + 5;
int n, q, rt, tot, now, g[maxn], ans;
int sta[maxn], top;
struct node{int pla[2];
} a[maxn];
struct tree{int mx[2], mn[2], sz, ls, rs;node place;
} t[maxn]; inline int New(){if(top) return sta[top--];return ++tot;
}
inline bool cmp(const node &A, const node &B){return A.pla[now] < B.pla[now];
}inline void update(int p){for(int i=0; i<=1; i++){t[p].mx[i] = t[p].mn[i] = t[p].place.pla[i];if(t[p].ls) t[p].mx[i] = max(t[p].mx[i], t[t[p].ls].mx[i]), \t[p].mn[i] = min(t[p].mn[i], t[t[p].ls].mn[i]);if(t[p].rs) t[p].mx[i] = max(t[p].mx[i], t[t[p].rs].mx[i]), \t[p].mn[i] = min(t[p].mn[i], t[t[p].rs].mn[i]);}t[p].sz = t[t[p].ls].sz + t[t[p].rs].sz + 1;
}inline int build(int l, int r, int opt){if(l > r) return 0;int x = New(), mid = l + r >> 1; now = opt;nth_element(a+l, a+mid, a+r+1, cmp); t[x].place = a[mid];t[x].ls = build(l, mid-1, opt^1);t[x].rs = build(mid+1, r, opt^1);update(x); return x;
}inline void pia(int p, int cnt){if(t[p].ls) pia(t[p].ls, cnt);a[cnt+t[t[p].ls].sz+1] = t[p].place, sta[++top] = p;if(t[p].rs) pia(t[p].rs, cnt+t[t[p].ls].sz+1);
}inline void check(int &p, int opt){if(t[p].sz*0.75<max(t[t[p].ls].sz, t[t[p].rs].sz))pia(p, 0), p = build(1, t[p].sz, opt);
}inline void insert(node ret, int &p, int opt){if(!p){p = New(); t[p].place = ret;t[p].ls = t[p].rs = 0;update(p); return;}if(ret.pla[opt] <= t[p].place.pla[opt]) insert(ret, t[p].ls, opt^1);else insert(ret, t[p].rs, opt^1);update(p); check(p, opt);
}inline int ck(node ret, int p, int k){int mx = max(abs(ret.pla[0] - t[p].mn[0]), abs(ret.pla[0] - t[p].mx[0])) + \max(abs(ret.pla[1] - t[p].mn[1]), abs(ret.pla[1] - t[p].mx[1]));int mn = max(0, ret.pla[0] - t[p].mx[0]) + max(0, t[p].mn[0] - ret.pla[0]) + max(0, ret.pla[1] - t[p].mx[1]) + max(0, t[p].mn[1] - ret.pla[1]);if(mx <= k) return 1;if(mn > k) return -1;return 0;
}inline int query(node ret, int p, int k){if(!p) return 0;int q = ck(ret, p, k);if(q == -1) return 0;if(q == 1) return t[p].sz;int res = 0;if(abs(t[p].place.pla[0]-ret.pla[0]) + \abs(t[p].place.pla[1]-ret.pla[1]) <= k)res++;res += query(ret, t[p].ls, k);res += query(ret, t[p].rs, k);return res;
} signed main() {scanf("%d%d", &n, &q);for(int i=1; i<=n; i++){scanf("%d", g+i);a[i].pla[0] = i;a[i].pla[1] = g[i];}rt = build(1, n, 0);while(q--){char s[15]; int x, k; node ins;scanf("%s%d%d", s, &x, &k);ins.pla[0] = x, ins.pla[1] = k;if(s[0] == 'M') g[x] = k, insert(ins, rt, 0);else {ins.pla[1] = g[x];printf("%d\n", query(ins, rt, k));}}
}
旋转坐标系:
#include<bits/stdc++.h>
#define rint register int
#define deb(x) cerr<<#x<<" = "<<(x)<<'\n';
using namespace std;
typedef long long ll;
typedef pair <int,int> pii;
const int maxn = 2e5 + 5;
int n, q, rt, tot, now, g[maxn], ans;
int sta[maxn], top;
struct node{int pla[2];
} a[maxn];
struct tree{int mx[2], mn[2], sz, ls, rs;node place;
} t[maxn]; inline int New(){if(top) return sta[top--];return ++tot;
}
inline bool cmp(const node &A, const node &B){return A.pla[now] < B.pla[now];
}inline void update(int p){for(int i=0; i<=1; i++){t[p].mx[i] = t[p].mn[i] = t[p].place.pla[i];if(t[p].ls) t[p].mx[i] = max(t[p].mx[i], t[t[p].ls].mx[i]), \t[p].mn[i] = min(t[p].mn[i], t[t[p].ls].mn[i]);if(t[p].rs) t[p].mx[i] = max(t[p].mx[i], t[t[p].rs].mx[i]), \t[p].mn[i] = min(t[p].mn[i], t[t[p].rs].mn[i]);}t[p].sz = t[t[p].ls].sz + t[t[p].rs].sz + 1;
}inline int build(int l, int r, int opt){if(l > r) return 0;int x = New(), mid = l + r >> 1; now = opt;nth_element(a+l, a+mid, a+r+1, cmp); t[x].place = a[mid];t[x].ls = build(l, mid-1, opt^1);t[x].rs = build(mid+1, r, opt^1);update(x); return x;
}inline void pia(int p, int cnt){if(t[p].ls) pia(t[p].ls, cnt);a[cnt+t[t[p].ls].sz+1] = t[p].place, sta[++top] = p;if(t[p].rs) pia(t[p].rs, cnt+t[t[p].ls].sz+1);
}inline void check(int &p, int opt){if(t[p].sz*0.75<max(t[t[p].ls].sz, t[t[p].rs].sz))pia(p, 0), p = build(1, t[p].sz, opt);
}inline void insert(node ret, int &p, int opt){if(!p){p = New(); t[p].place = ret;t[p].ls = t[p].rs = 0;update(p); return;}if(ret.pla[opt] <= t[p].place.pla[opt]) insert(ret, t[p].ls, opt^1);else insert(ret, t[p].rs, opt^1);update(p); check(p, opt);
}inline int ck(int p, int x1, int y1, int x2, int y2){if(t[p].mn[0]>x2 || t[p].mx[0]<x1) return -1;if(t[p].mn[1]>y2 || t[p].mx[1]<y1) return -1;if(t[p].mn[0]>=x1 && t[p].mx[0]<=x2 && t[p].mn[1]>=y1 && t[p].mx[1]<=y2) return 1;return 0;
}inline int query(int p, int x1, int y1, int x2, int y2){if(!p) return 0;int q = ck(p, x1, y1, x2, y2);if(q == -1) return 0;if(q == 1) return t[p].sz;int res = 0;if(t[p].place.pla[0]>=x1 && t[p].place.pla[0]<=x2 && \t[p].place.pla[1]>=y1 && t[p].place.pla[1]<=y2) res++;res += query(t[p].ls, x1, y1, x2, y2);res += query(t[p].rs, x1, y1, x2, y2);return res;
} signed main() {scanf("%d%d", &n, &q);for(int i=1; i<=n; i++){scanf("%d", g+i);a[i].pla[0] = i - g[i];a[i].pla[1] = i + g[i];}rt = build(1, n, 0);while(q--){char s[15]; int x, k; node ins;scanf("%s%d%d", s, &x, &k);ins.pla[0] = x - k, ins.pla[1] = x + k;if(s[0] == 'M') g[x] = k, insert(ins, rt, 0);else printf("%d\n", query(rt, x-g[x]-k, x+g[x]-k, x-g[x]+k, x+g[x]+k));}
}
这篇关于BZOJ 2989 数列 —— kd-tree + 旋转坐标系的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






