本文主要是介绍论文笔记:R2D2: Repeatable and Reliable Detector and Descriptor,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
论文链接:https://arxiv.org/pdf/1906.06195.pdf
代码链接:https://github.com/naver/r2d2
主要内容
本文首先指出显著区域未必是易辨识区域,因此用判断极值的方法来判断keypoint(关键点)位置的方法未必准确,这样会影响到所提取描述子的性能。相比于之前只重视特征点的repeatble(可重复性,即特征在连续图像中多次出现)的方法,作者加入了reliable(可靠性)的因数,指出特征的提取需要在repeatble和reliable的均不错的区域进行。同时,沿用D2-net网络的detection-and-description方法(关于D2-net,可以参考我的博客),因此方法命名为R2D2,训练方式采用自监督进行。
文中指出,repeatble和discriminative(特异性,易于匹配)是两个概念,参考下图:
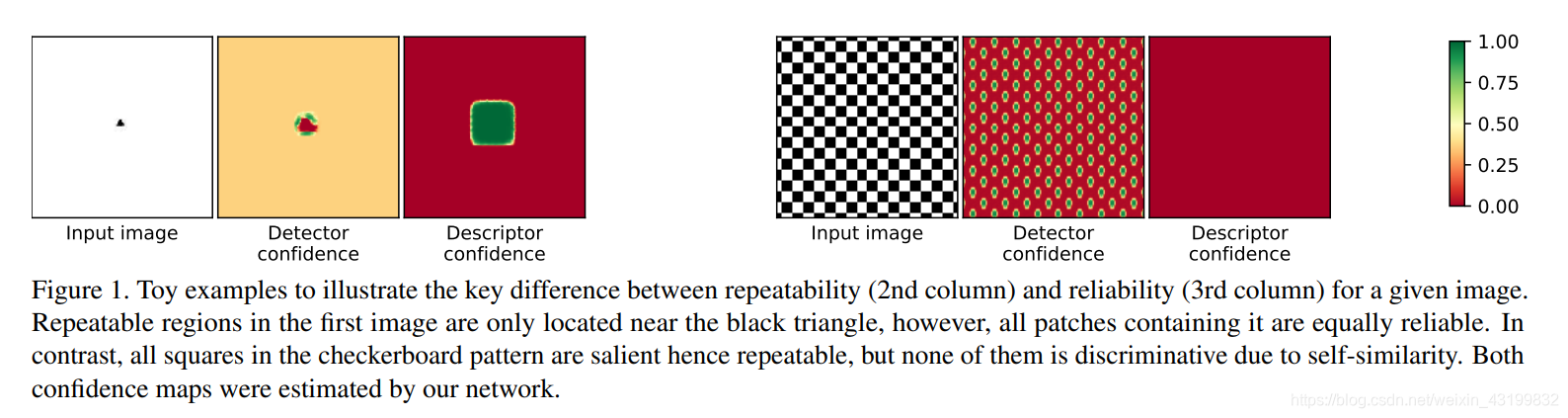
左图中体现了可靠性,包括三角形的区域就是discriminative的地方。并且这些区域拥有相同的可靠性。右图中虽然虽然有很好的可重复性,但是由于图片中的物体形状过于相似,不存在或者说很难找到discriminative的地方。
文章的主要贡献
1、提出了一种全新的损失函数来学习关键点的检测,并且关键点在保证稀疏性(保证计算量合适)的同时可以均匀分布在图像上,相比于别的方法,可以获得更好的可重复性。
2、在学习可靠的局部描述子的同时,可以清晰地给出这些描述子的可靠性程度。
3、所提出的方法挑选出了重复性和可靠性均高的的关键点,并且取得了最好的效果。
具体实现
整体网络架构如下图所示:

对于尺寸为 H × W H×W H×W的输入图片 I I I,输出由三部分组成,第一个是一个三维的tensor X ∈ R H × W × D X\in\R^{H×W×D} X∈RH×W×D,第二个是一个heatmap S ∈ [ 0 , 1 ] H × W S\in[0,1]^{H×W} S∈[0,1]H×W,它的目的是提供稀疏并且可重复性高的关键点位置,为了完成这个目的,在训练 S S S包含强烈并且可重复性高的局部最大值的同时,从和局部最大值有响应的地方提取关键点。第三个是关于可靠性地图 R ∈ [ 0 , 1 ] H × W R\in[0,1]^{H×W} R∈[0,1]H×W的,用来提供网络所评估的可靠性信息,也就是每一个像素点 ( x , y ) (x,y) (x,y)处描述子 X i j ( i = 1.. W , j = 1.. H ) X_{ij}(i=1..W,j=1..H) Xij(i=1..W,j=1..H)的可辨识度。
主干网络参考L2-Net,用3个3×2的卷积层替代了最后一层的8×8卷积层,从而减少权重数量,并且可以获得类似甚至更好的效果。输出的128维的tensor作为下一个分支网络的输入,a)通过 l 2 l_2 l2正则层得到描述子 X X X,b)通过一个平方处理,再通过一个1×1的卷积层和一个softmax层得到 R R R,c)和b)一样的处理得到 S S S。
损失函数
repeatability
作者指出用监督的学习方法会妨碍神经网络去寻找更好的关键点,因此训练采用自监督的方法。
记 I I I和 I ′ I' I′为同一场景下的两张图片, U ∈ R H × W × 2 U\in\R^{H×W×2} U∈RH×W×2为 I I I和 I ′ I' I′之间的真实映射关系,也就是说如果 I I I中的像素点 ( i , j ) (i,j) (i,j)与 I ′ I' I′中的像素点 ( i ′ , j ′ ) (i',j') (i′,j′)对应,则 U i j = ( i ′ , j ′ ) U_{ij}=(i',j') Uij=(i′,j′)。事实上,如果 I I I和 I ′ I' I′为自然图片, U U U可以通过光流法或者双目视觉匹配方法估算得到,如果 I ′ I' I′是通过已知变换得到,比如单应矩阵,那么可以精确地得到 U U U。记 S S S和 S ′ S' S′分别是 I I I和 I ′ I' I′的repeatability map, S U ′ S'_U SU′是从 I ′ I' I′中得到,并根据 U U U进行warp得到的heatmap。(看前面的说明,repeatability map和heatmap不应该是一种东西么?)
最终,希望可以使得 S S S中的局部最大值可以和 S U ′ S'_U SU′中的局部最大值对应。文中采取的策略是最大化 S S S和 S U ′ S'_U SU′之间的余弦相似度,记为 c o s i m cosim cosim,当 c o s i m ( S , S U ′ ) cosim(S,S'_U) cosim(S,SU′)最大化之后, S S S和 S U ′ S'_U SU′这两张heatmap是完全一致的,它们的极大值点处实现了精确地匹配。当然这是在假设没有遮挡、变形、边界效应的情况,为了弥补这些影响,采取对重叠的块计算其余弦相似度并求其均值的策略。我们定义一系列的patch P = p \mathcal P={p} P=p,其中包含了图片中所有的 N × N N×N N×N个patch,然后定义损失:

这里, S [ p ] ∈ R N 2 S[p]\in \R^{N^2} S[p]∈RN2表示从 S S S中提取出来的 N × N N×N N×N个向量化的patch p p p, S U ′ [ p ] S'_U[p] SU′[p]同理。
同时,我们注意到,如果 S S S和 S U ′ S'_U SU′为定值,那么 L c o s i m \mathcal L_{cosim} Lcosim也可以取到定值。为了避免这种事情发生,引入第二个损失函数,来最大化repeatability map中的局部最大值:

repeatability map的最终损失函数可以通过上面两个式子的加权和确定:

reliability
第一幅图片中的每一个像素点 ( i , j ) (i,j) (i,j)定义了一个尺寸为 M M M的patch,然后和第二幅图片中全部的其他的patch进行比较,在知道了真实映射关系 U U U之后,便可以计算其AP(Average Precision)值,为了保证所提取的描述子的可靠性,设计了如下的损失函数:

这里, κ ∈ [ 0 , 1 ] \mathcal \kappa\in[0,1] κ∈[0,1]是一个用来规定每个patch最小预期AP的的超参数。为了最小化损失函数,当 A P ( i , j ) < κ AP(i,j)<\mathcal \kappa AP(i,j)<κ时,网络应该预测 R i , j = 0 R_{i,j}=0 Ri,j=0,当 A P ( i , j ) > κ AP(i,j)>\mathcal \kappa AP(i,j)>κ时,网络应该预测 R i , j = 1 R_{i,j}=1 Ri,j=1。时间测试中发现,当 κ \mathcal \kappa κ取0.5时可以取得很好的结果。
描述子的得分最终为 S i j S_{ij} Sij和 R i j R_{ij} Rij的乘积。
实验结果



这篇关于论文笔记:R2D2: Repeatable and Reliable Detector and Descriptor的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







