本文主要是介绍Lazy Theta * : 任意角度路径规划及3D空间下的路径分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
原文地址:http://idm-lab.org/bib/abstracts/papers/aaai10b.pdf
1.简介
路径规划是与机器人技术和视频游戏紧密相关的技术,它通常由两个核心问题构成:
- 抽象图数据:将连续地形信息离散化为图数据
- 路线生成:从一个给定的起始点,沿图数据的边进行信息传递和扩展,最终到达给定的目标点
开发者们发明了多种不同的方法来解决抽象图数据的问题,例如2D空间下的基于不同形状(正方形、六边形)的网格,3D空间下的基于不同多边形的网格,可视图,路点图等等。
而另一方便,在解决路线生成问题方面,开发者们通常都会选择A * 算法,因为A * 既高效,又简单,并且能够找到基于网格边缘的最短路径。A * 及传统的寻路算法(这里主要指A * 的各种优化算法)是以网格的边传播和扩展,并且生成的路线也被约束在网格边上。但是基于网格边缘的最短路径并不一定是实际情况下的最短路径(如下图)。
图 1:
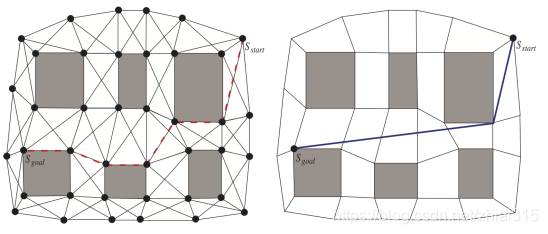
上图表示将一个连续地形离散化为NavMesh,其中的多边形通过黑白表示是否阻隔。左侧图片显示的是通过A * 找到的基于格子边缘的最短路径,右侧图片表示的是实际最短路径。可见,A * 找到的路径比实际最短路径要长更多。
实际上,在2D空间下,基于方格边缘的路线比真实最短路线长出约8%的距离,而在3D空间中,基于立方体边缘的路线比实际最短路线长出的距离增加到了13%左右。因此,Theta * 算法作为一种不依附格子边缘的、可任意角度转向、平滑的寻路算法,可以很好地解决这个问题。然而,在3D空间中邻接点的数量远远大于2D空间中邻接点数量。例如以正方形组成的2D网格中,相邻只有8个邻居,而在以立方体组成的3D网格中,邻居的数量会激增至26个。邻接点数量的增加大大降低了Theta * 算法在3D空间下的效率,因为Theta * 在每次扩展新顶点的时候,都会进行大量的LOS计算。于是,我们提出 Lazy Theta * 算法,通过延迟执行LOS检查,降低LOS的次数,从而提升Theta * 的效率。
2.标记与定义
本文中,我们考虑以立方体单元组成的3D网格。所有立方体单元的顶点的集合记做 V。点Sstart表示寻路的起始点,它是某个立方体单元的某个顶点,即 Sstart∈V。点Sgoal表示寻路的目标点,它也是某个立方体单元的某个顶点,即 Sgoal∈V。 L(s, s’)表示从s点到s’点之间的线段。c(s, s’)表示L(s, s’)的长度,也即两点间距离。lineofsight(s, s’)是检查s和s’间是否存在视线(LOS)的方法,当且仅当L(s, s’)不从任何阻隔的立方体单元内部穿过,也不从两个阻隔的立方体单元的共面穿过时,我们认为这两点间是存在LOS的。这里为了简单起见,认为从两个阻隔立方体相交的顶点或者相交的边穿过是允许的。
3. A * 算法
A * 伪代码如下:
图 2:
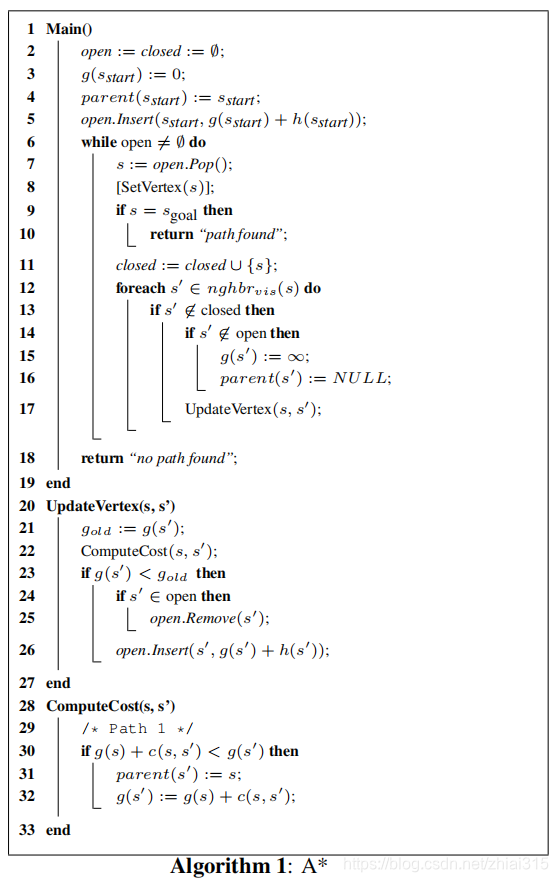
本文所有讨论都是基于上图 A * 伪代码,并以此为基础进行更改。
在A * 算法中,每个顶点持有两个重要的数据:
- G值:表示从寻路起始点Sstart到该点的当前最短距离。
- parent(s):表示点s的父节点,用于在寻路结束后剥离最终路线。
另外,A * 中还持有两个重要的全局列表:
- open list : 表示即将扩展的点的优先队列
- close list : 表示所有已扩展过的点的集合
从上图伪代码中的ComputeCost方法可以看到,对于当前点s的邻接点s’,A * 将起始点sstart到s’的最终路径拆分成sstart → s 和 s → s’ 两部分来考虑,通过这两部分的距离得到总的距离,如果这个g值比当前s’已知的g值(从别的点到达s’点产生的g值)小,则更新g值,并将s’的父节点设置为s。
4. 路径长度分析
原文在本节中定义了最短顶点路径,实际也可理解为就是基于LOS的最短路径,它是与最短边缘路径相对的,最短边缘路径即A * 找出的基于网格边的最短路径。由这三者得到如下关系:
最短边缘路径 ≥ 最短顶点路径 ≥ 最短实际路径
另外,本节中还提出了一些推理和证明,恕在下看不懂。有兴趣的可以去看原文。
5. A * PS
在之前的文章中已经讨论过A * PS,即对A * 的最终路径进行平滑后处理的优化方案,并指出,A * PS 虽然能够平滑路线以及缩短路径,但并不能解决A * 路径与真实最短路径差距较大的问题。这里需要说明的是,在3D空间中,这个问题是依然存在的(如下图)。
图 3:
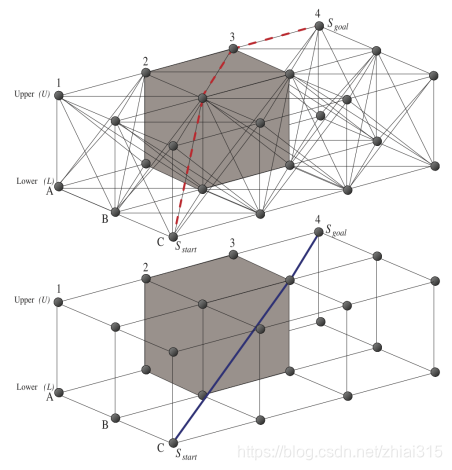
上图中,A * 找到的最短路径是上方图片的红色虚线路径,经过A * PS处理后,会将路径中的点A3U删除掉,使路径从点B2U直接连接到目标点Sgoal(A4U)。这条路径相比A * 找到的原始路径更加平滑,且的确距离更短,但是从图中可以看出,处理后的路径依然要比真实最短路径(图中蓝色实线路径)更长。
6. Theta *
Theta * 是一种不限制角度的寻路方法,它可以在于A * 和 A * PS 近乎相同的时间内找到一条更平滑、距离更短的路径。Theta * 与 A * 关键的区别在于,Theta * 中允许一个顶点的父节点是另外任意一个顶点,而在A * 中,顶点的父节点只能是它的可见邻接点。
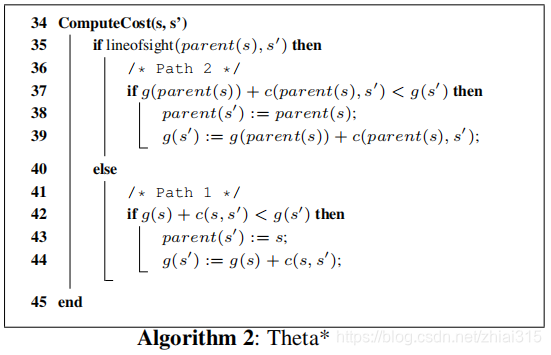
对于一个即将扩展的新点s’,Theta * 会考虑两种到达该点的路径方案:
- 路径1:和A * 一样,将sstart到s’的路径拆分成 sstart → s 和 s → s’
- 路径2:将sstart到s’的路径拆分成 sstart→ parent(s) 和 parent(s) → s’
在parent(s) 和 s’ 之间存在LOS的情况下,Theta * 会优先选择路径2,因为根据三角形不等式,两边和大于第三边,路径2一定比路径1更优。下图伪代码展示了Theta * 在选择路径上与A * 的不同之处。
图 4:
7. Lazy Theta *
在本文一开始我们就提到了路径规划的两个核心问题,其中第一个便是抽象图数据问题。理论上讲,能够与多种抽象图数据结构兼容的路线生成算法,其应用的广泛性也会更高。在这一点上,Theta * 并不依赖特定的抽象图数据,它既可以应用在正方形网格上,也可以应用在NavMesh等其他结构上。这得益于它的基础——三角形不等式。
Theta * 最大的问题在于LOS检查带来的消耗。当然,一些现有的画线算法可以在一定程度上降低LOS的复杂度,但是这些算法往往都是有局限性的,并不能适用于各种不同的抽象图数据,这便对Theta * 的应用场景产生了限制。于是,我们从另外一个角度来考虑这个问题,即减少LOS的次数以提升效率,也就是Lazy Theta * 。
Theta * 在每次扩展到一个新的顶点s时,都会将所有s的可见邻接点都与parent(s)计算一次LOS,然后更新这些邻接点的g值和父节点,再将它们添加到 open list 中去,这导致每扩展一个点都要进行大量的LOS计算,特别是在3D网格中邻接点数量急剧增加的时候,而实际上并不是所有邻接点的LOS计算都是必要的,因为很多点最终并不会被访问到。
与Theta * 不同的是,Lazy Theta * 在扩展到一个新的顶点时,并不对邻接点的LOS进行计算,而是乐观地认为所有可见邻接点与parent(s)都存在LOS,于是直接修改它们的g值和父节点,然后添加到open list中去。当从open list 中pop出某个顶点,需要真正以这个顶点为基础开始扩展的时候,再去验证它与父节点之间是否真的存在LOS,如果存在,则什么也不用改变,如果不存在,则重新计算它的g值和父节点。这样,只有那些真正被探索到的点才会实际执行LOS检查,大大减少了LOS的次数。
假设要重新计算g值和父节点的顶点为s’,计算方法是:
- 找到s’的可见邻接点s’’
- 如果 s’’ 不在close list 中,则舍弃
- 如果s’’ 在close list 中,则计算 g = g(s’’) + c(s’ , s’’)
- 取最终g最小的那个s’’,即为s’的父节点,其对应算出的 g 值即为s’的 g 值
之所以这么做,是因为我们确信,一定存在这样的一个顶点s’’,正是因为这个s’'的存在,所以当前点s’才会被添加进open list 当中。
Lazy Theta * 的核心伪代码如下图。
图 5:
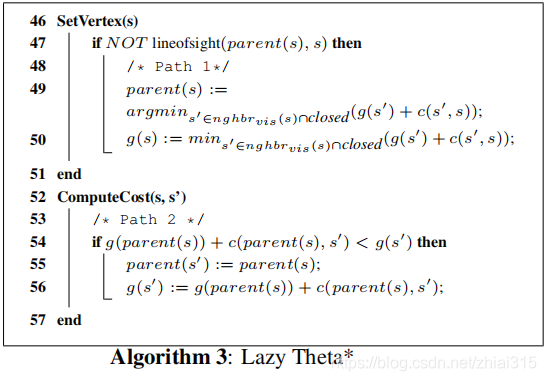
在实际运用中,特别是在3D空间下,Lazy Theta * 可以大幅度地降低LOS检查的次数(如下图)。
图 6:
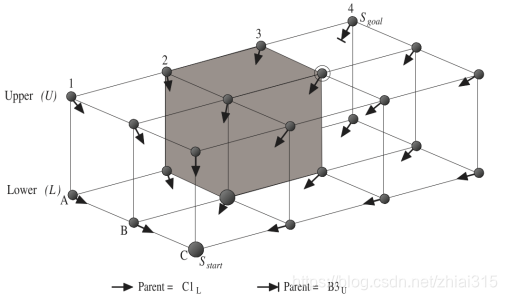
上图中,从C1L到 A4U 的寻路过程中,Theta * 算法会执行36次LOS检测,而Lazy Theta * 只会执行4次。
8. Lazy Theta * 的变体
本节介绍两种Lazy Theta * 的变体,仅供参考。
8.1 Lazy Theta * -R
Lazy Theta * -R 与 Lazy Theta * 基本相同,其唯一不同的地方在于,在 Lazy Theta * -R中,当某个点的LOS检测没有通过时,除了对其重新计算g值和父节点之外,还会对其进行标记,并在计算结束之后将其重新放回open list 中,然后重新pop。
这样做的目的是使用路径1重新检查路径,以确保获取到的路径是最短路径,因为如果不把点放回open list中,那g值就是不可变的了。
8.2 Lazy Theta * -P
与 Lazy Theta * 的乐观性不同,每当扩展到一个新的顶点 s 的时候,Lazy Theta * -P 总是悲观的认为 s 的所有邻接点 s’ 都与parent(s)之间不存在LOS,于是它会按照路径1设置s’的 g 值和父节点。Lazy Theta * -P 之所以如此做,其背后的思想是这样可以携带一个重要的属性,也就是保证在open list 中的所有顶点,与其父节点之间一定是存在LOS的。这在一些特殊情况下是有用的。
这篇关于Lazy Theta * : 任意角度路径规划及3D空间下的路径分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








