本文主要是介绍开源仿真引擎ODE(Open Dynamics Engine)环境搭建,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Codeblocks 版本16.01
因为仿真需要,找到了这个软件,官网资料有点旧,比较杂乱,记录下安装步骤。
下载源码
https://www.ode-wiki.org/wiki/index.php?title=Manual:_Install_and_Use
安装codeblocks代码编辑器和premake编译工具。
sudo add-apt-repository ppa:damien-moore/codeblocks-stable
sudo apt-get update
sudo apt-get install codeblocks
sudo apt-get install premake premake4
接着/home/yake/ProgramFiles/ode-0.13/ode/src/config.h修改为1,保持软件对之前旧版本代码的兼容性。
//#define dTRIMESH_OPCODE_USE_OLD_TRIMESH_TRIMESH_COLLIDER 0
#define dTRIMESH_OPCODE_USE_OLD_TRIMESH_TRIMESH_COLLIDER 1
然后转换为codeblocks的工程(注意调用的是premake4注意codeblocks参数),因为目录下有premake4.lua配置文件,所以调用premake4来编译。
$ cd /home/yake/ProgramFiles/ode-0.13/build
$ premake4 --help
$ premake4 --with-demos --with-tests codeblocks
$ premake4 --with-demos --with-tests --only-double codeblocks
ode里面支持双精度和单精度的仿真,本来想调用双精度的,但是环境依赖项出不来,后来去掉--only-double就可以在在codeblocks里面选择了
在/home/yake/ProgramFiles/ode-0.13/lib/DebugDoubleLib下可以看到生成的文件信息

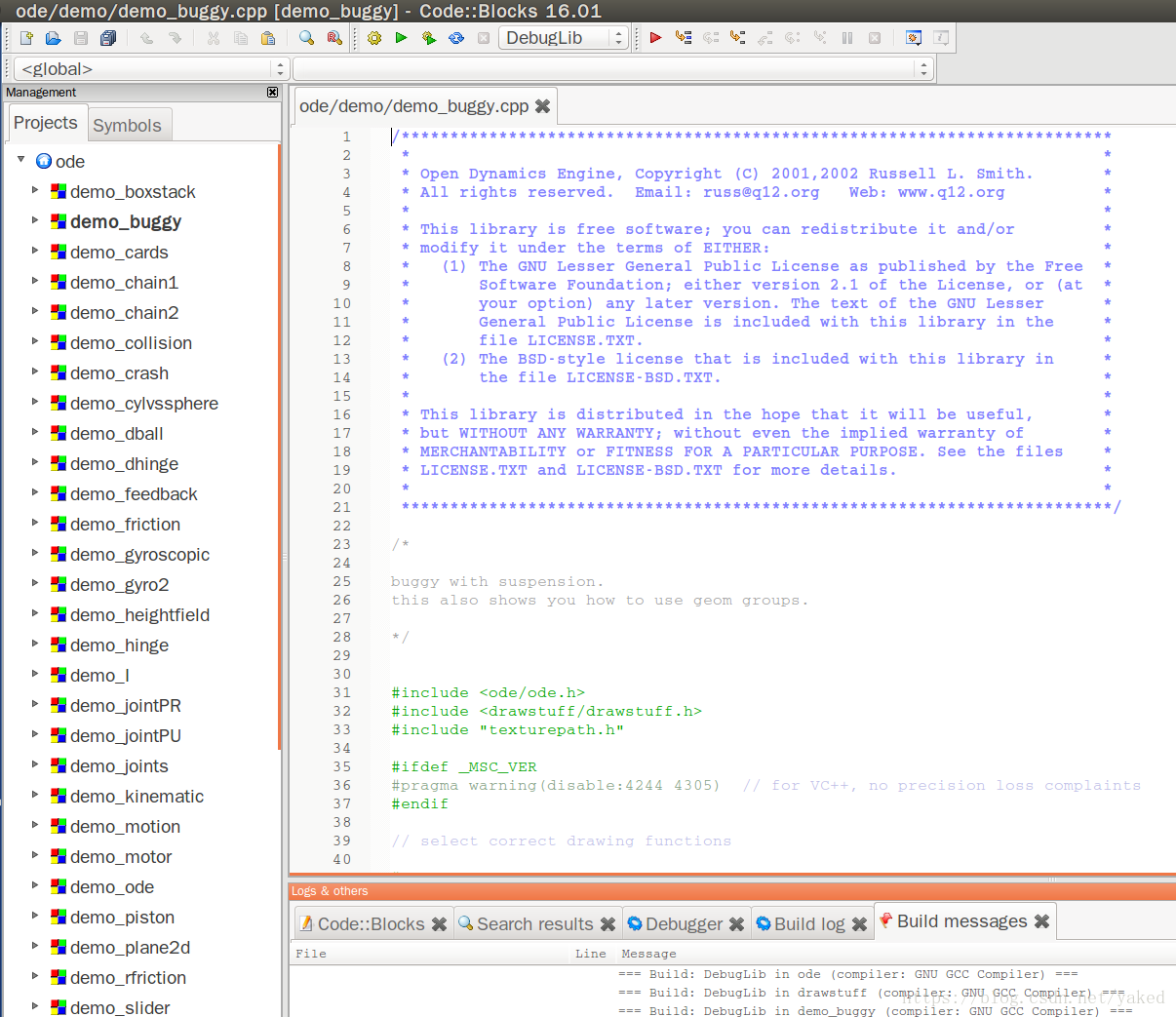
利用Codeblocks打开工程文件:/home/yake/ProgramFiles/ode-0.13/build/codeblocks/ode.workspace,可以看到源代码都已经导入进来了,如下图所示。
接着下载日本教授的例子http://demura.net/simulation
解压到ode的源码目录
cd /home/yake/ProgramFiles/ode-0.13/roboSimu
因为目录下只有premake.lua文件,所以用premake来编译。
$ premake --help
$ premake --os linux --target cb-gcc

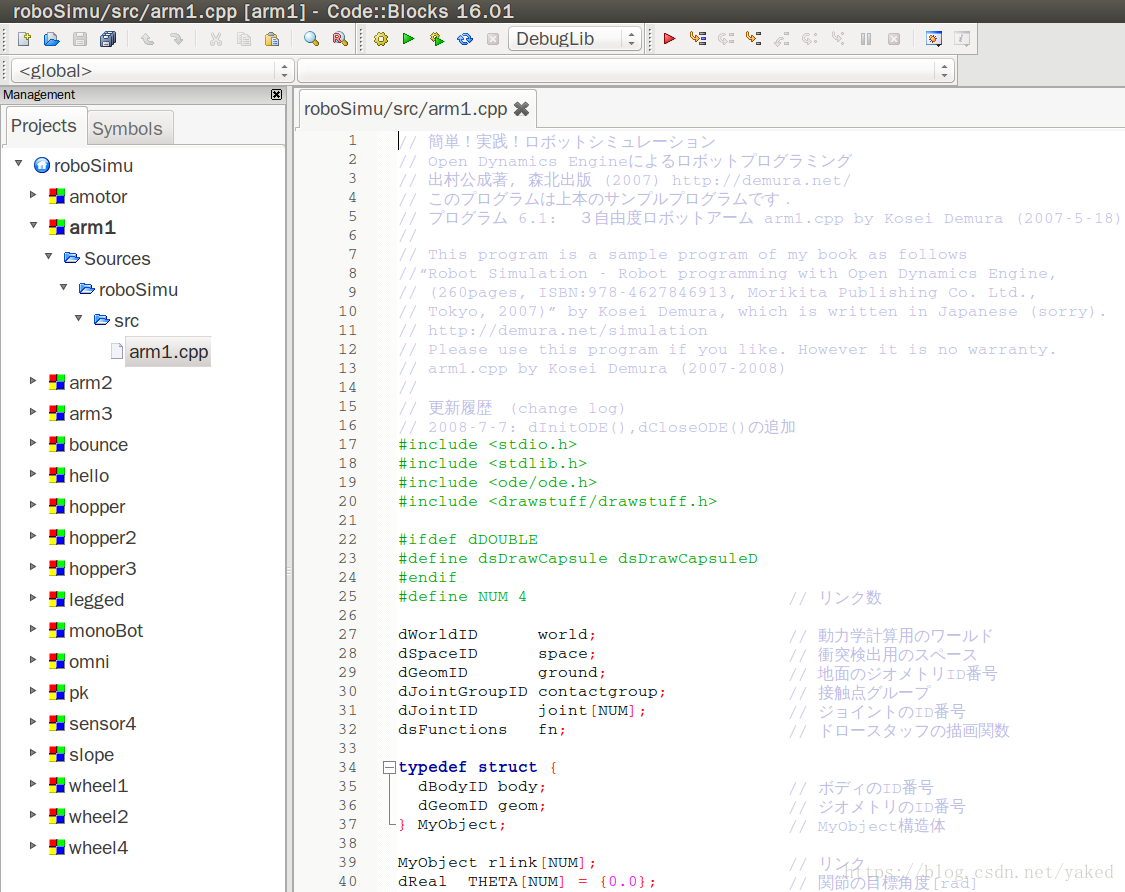
同理,利用codeblocks打开工程/home/yake/ProgramFiles/ode-0.13/roboSimu/src/roboSimu.workspace,如下图所示
编译的时候报错误

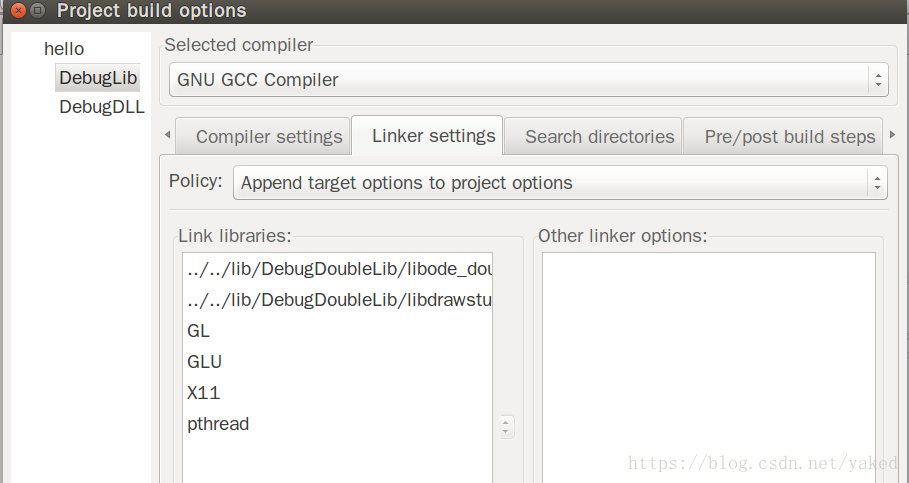
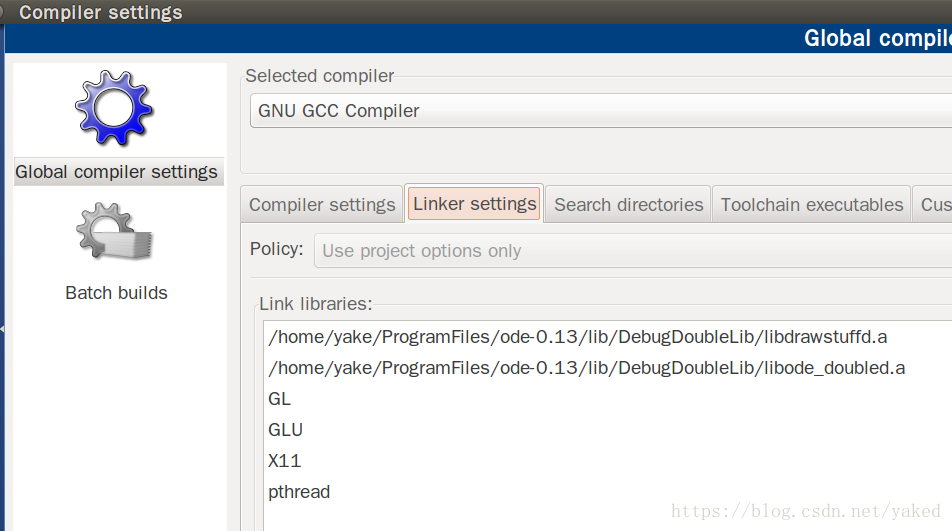
通过修改ode_double和draw_stuff链接项解决。直接指定到上次利用DebugDoubleLib编译好的文件就可以解决

/usr/bin/ld: ../../lib/DebugDoubleLib/libdrawstuffd.a(x11.o)||undefined reference to symbol 'XNextEvent'|
通过添加X11链接项解决

/usr/bin/ld: ../../lib/DebugDoubleLib/libode_doubled.a(atomic.o)||undefined reference to symbol 'pthread_mutexattr_init@@GLIBC_2.2.5'|
通过添加pthread链接项解决
最后的链接项如下图所示。
Project——Build Options
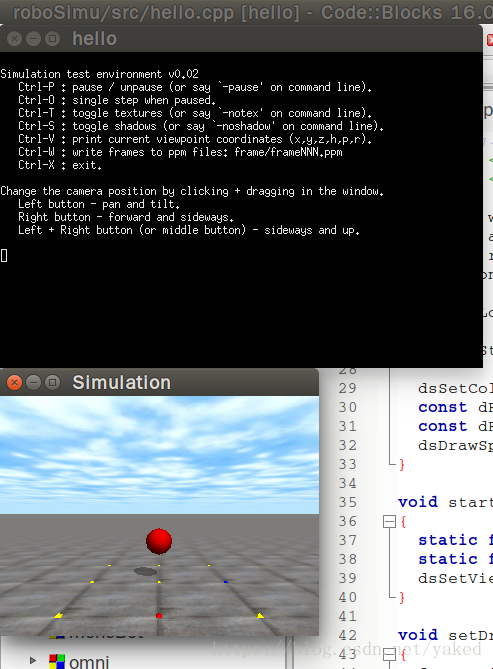
编译成功后,运行例子就可以了,这里以hello工程为例。结果如下图所示,运行成功后,球自由落体运动。在球体的那个窗口Ctrl+X然后按Enter退出
参考地址:
https://www.ode-wiki.org/wiki/index.php?title=Manual:_Install_and_Use
http://demura.net/english/378.html
http://demura.net/simulation
http://demura.net/9ode/575.html
问题解决后就可以跟着作者的目录接着进行学习了
http://demura.net/english
=========================================
workspace里有很多个Projects,不想一个个添加链接库
Settings——Compiler
另外替换掉命令行终端,由xterm改为gnome的
Settings——Environment
gnome-terminal -t $TITLE -x
参考链接:
https://blog.csdn.net/ztguang/article/details/51015388?locationNum=8
这篇关于开源仿真引擎ODE(Open Dynamics Engine)环境搭建的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





