本文主要是介绍【c++|opencv】二、灰度变换和空间滤波---1.灰度变换、对数变换、伽马变换,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
every blog every motto: You can do more than you think.
https://blog.csdn.net/weixin_39190382?type=blog
0. 前言
灰度变换、对数变换、伽马变换
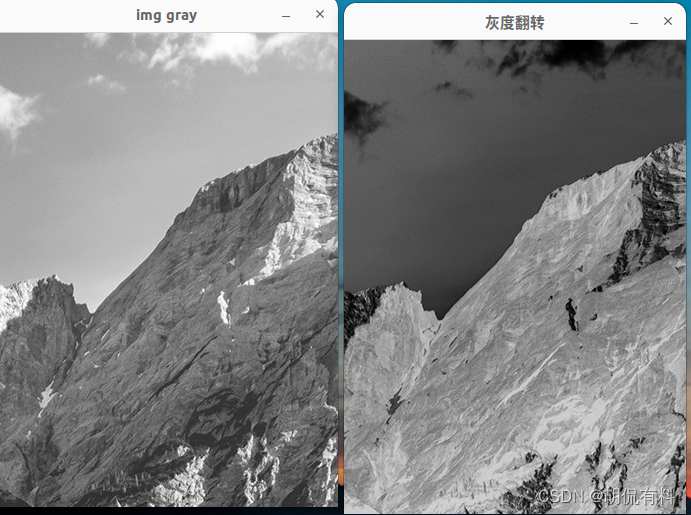
1. 灰度变换
#include <iostream>
#include <opencv2/opencv.hpp>using namespace std;
using namespace cv;int main()
{Mat img,out_img,img_gray;img = imread("/home/v/home.png");if (img.empty()){cout << "Could not open or find the image" << endl;return -1;}cvtColor(img, img_gray, COLOR_BGR2GRAY);imshow("img gray",img_gray); out_img = img_gray.clone();for (int i=0;i<img_gray.rows;i++){for (int j=0;j<img_gray.cols;j++){// 灰度翻转out_img.at<uchar>(i,j) = 255 - img_gray.at<uchar>(i,j); }}imshow("灰度翻转",out_img);waitKey(0);return 0;}
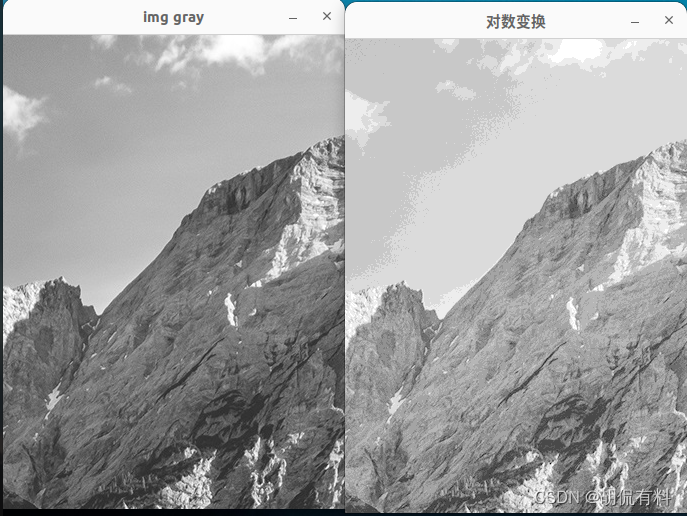
2. 对数变换
#include <iostream>
#include <opencv2/opencv.hpp>using namespace std;
using namespace cv;int main()
{Mat img,out_img,img_gray;img = imread("/home/v/home.png");if (img.empty()){cout << "Could not open or find the image" << endl;return -1;}cvtColor(img, img_gray, COLOR_BGR2GRAY);imshow("img gray",img_gray); out_img = img_gray.clone();for (int i=0;i<img_gray.rows;i++){for (int j=0;j<img_gray.cols;j++){// 对数变换6*log(r+1) 伽马变换out_img.at<uchar>(i,j) = 6*log((double)(img_gray.at<uchar>(i,j)) + 1);}}normalize(out_img,out_img,0,255,NORM_MINMAX); // 图像归一化convertScaleAbs(out_img,out_img); // 数据类型转换到CV_8Uimshow("对数变换",out_img);waitKey(0);return 0;}
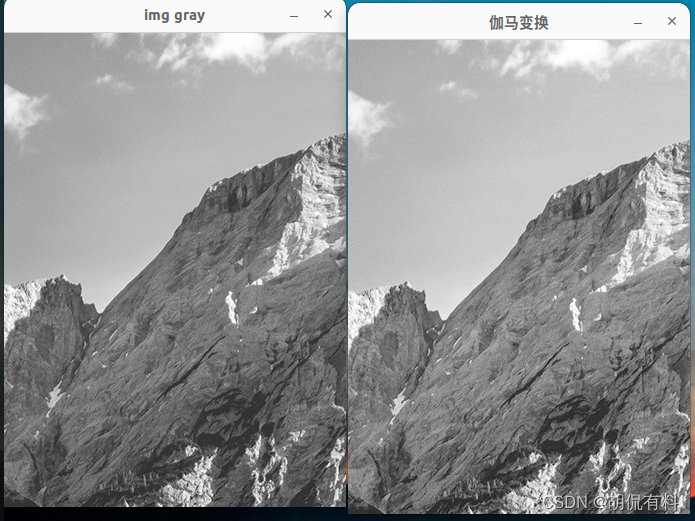
3. 伽马变换
#include <iostream>
#include <opencv2/opencv.hpp>using namespace std;
using namespace cv;int main()
{Mat img,out_img,img_gray;img = imread("/home/v/home.png");if (img.empty()){cout << "Could not open or find the image" << endl;return -1;}cvtColor(img, img_gray, COLOR_BGR2GRAY);imshow("img gray",img_gray); out_img = img_gray.clone();for (int i=0;i<img_gray.rows;i++){for (int j=0;j<img_gray.cols;j++){// 伽马变换6*r^0.5out_img.at<uchar>(i,j) = 6*pow((double)(img_gray.at<uchar>(i,j)),0.5);}}normalize(out_img,out_img,0,255,NORM_MINMAX); // 图像归一化convertScaleAbs(out_img,out_img); // 数据类型转换到CV_8Uimshow("伽马变换",out_img);waitKey(0);return 0;}
这篇关于【c++|opencv】二、灰度变换和空间滤波---1.灰度变换、对数变换、伽马变换的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




