本文主要是介绍Ortec974A EPICS IOC程序,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1) 创建一个用户存放这个IOC程序结构的目录:
root@orangepi4-lts:/usr/local/EPICS/program# mkdir ortec974A
root@orangepi4-lts:/usr/local/EPICS/program# cd ortec974A/
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A# ls
2)使用makeBaseApp.pl构建这个IOC程序架构:
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A# makeBaseApp.pl -t ioc ortec974A
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A# makeBaseApp.pl -i -t ioc ortec974A
Using target architecture linux-aarch64 (only one available)
The following applications are available:ortec974A
What application should the IOC(s) boot?
The default uses the IOC's name, even if not listed above.
Application name?
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A# ls
configure iocBoot Makefile ortec974AApp3)编辑configure/RELEASE文件,添加这个IOC程序所需要的其它依赖模块:
...
SUPPORT=/usr/local/EPICS/synApps/support
ASYN=$(SUPPORT)/asyn
AUTOSAVE=$(SUPPORT)/autosave
CALC=$(SUPPORT)/calc
SCALER=$(SUPPORT)/scaler
...
4) 进入源文件目录ortec974AApp/src目录下:
a) 编写974A驱动程序源文件:
// drvOrtec974A.cpp
#include <stdlib.h>
#include <stddef.h>
#include <string.h>
#include <stdio.h>
#include <math.h>#include <asynPortDriver.h>
#include <asynOctetSyncIO.h>
#include <epicsEvent.h>
#include <epicsThread.h>
#include <epicsTime.h>
#include <errlog.h>
#include <iocsh.h>
#include <epicsExport.h> /* Defines epicsExportSharedSymbols */#include "devScalerAsyn.h"#define MAX_CHANNELS 4#define timeOut 0.1
static const char *driverName= "Scaler974A";class Scaler974A:public asynPortDriver
{
public:Scaler974A(const char *portName, const char *serialPort, int serialAddr, int poll);virtual asynStatus writeInt32(asynUser *pasynUser, epicsInt32 value);virtual asynStatus readInt32Array(asynUser *pasynUser,epicsInt32 *value, size_t nElements, size_t *nIn);virtual void report(FILE *fp, int details);void eventThread();private:int scalerReset;int scalerChannels;int scalerRead;int scalerReadSingle;int scalerPreset;int scalerArm;int scalerDone;double polltime;epicsEventId eventId;asynUser *pasynUserScaler;asynStatus sendCommand(const char *command, char *statusString, size_t maxStatusLen, size_t *statusLen);
};static void eventThreadC(void *pPvt)
{Scaler974A *pScaler974A = (Scaler974A *)pPvt;pScaler974A->eventThread();
}Scaler974A::Scaler974A(const char *portName, const char *serialPort, int serialAddr, int poll):asynPortDriver(portName, MAX_CHANNELS,asynInt32Mask | asynInt32ArrayMask | asynDrvUserMask,asynInt32Mask,/* Should also be ASYN_CANBLOCK, but device support does not work with asynchronous devices */ASYN_MULTIDEVICE,1,0,0)
{int i;asynStatus status;static const char *functionName="Scaler974A";if (poll==0) poll=100;this->polltime=poll / 1000.;this->eventId = epicsEventCreate(epicsEventEmpty);status = pasynOctetSyncIO->connect(serialPort, serialAddr, &this->pasynUserScaler, NULL);if (status != asynSuccess) {asynPrint(this->pasynUserSelf, ASYN_TRACE_ERROR,"%s:%s: error connecting to port %s address %d\n",driverName, functionName, serialPort, serialAddr);return;}createParam(SCALER_RESET_COMMAND_STRING, asynParamInt32, &this->scalerReset);createParam(SCALER_CHANNELS_COMMAND_STRING, asynParamInt32, &this->scalerChannels);createParam(SCALER_READ_COMMAND_STRING, asynParamInt32Array,&this->scalerRead);createParam(SCALER_READ_SINGLE_COMMAND_STRING, asynParamInt32, &this->scalerReadSingle);createParam(SCALER_PRESET_COMMAND_STRING, asynParamInt32, &this->scalerPreset);createParam(SCALER_ARM_COMMAND_STRING, asynParamInt32, &this->scalerArm);createParam(SCALER_DONE_COMMAND_STRING, asynParamInt32, &this->scalerDone);setIntegerParam(scalerChannels, MAX_CHANNELS);setIntegerParam(scalerDone, 1);for (i=0; i<MAX_CHANNELS; i++) setIntegerParam(i, scalerReadSingle, 0);epicsThreadCreate("Scaler974A",epicsThreadPriorityMedium,epicsThreadGetStackSize(epicsThreadStackMedium),(EPICSTHREADFUNC)eventThreadC,this);
}asynStatus Scaler974A::sendCommand(const char *command, char *statusString, size_t maxStatusLen, size_t *statusLen)
{size_t nWrite;asynStatus status;double timeout = 1.0;int eomReason;static const char *functionName = "sendCommand";/** asynStatus (*writeRead)(asynUser *pasynUser,const char *write_buffer, size_t write_buffer_len,char *read_buffer, size_t read_buffer_len,double timeout,size_t *nbytesOut, size_t *nbytesIn, int *eomReason);要写的字符串,要写的字符串长度,读出缓存,要读的字节数目,超时时间,实际写出的字节数,实际读入的字符数,结束原因asynStatus (*write)(asynUser *pasynUser, char const *buffer, size_t buffer_len,double timeout,size_t *nbytesTransfered);asynStatus (*read)(asynUser *pasynUser, char *buffer, size_t buffer_len,double timeout, size_t *nbytesTransfered,int *eomReason);** */status = pasynOctetSyncIO->write(this->pasynUserScaler, command, strlen(command), timeout, &nWrite);
// printf("In sendCommand write status: %d,write content:%s,write length:%d\n", status, command, nWrite);if (status != asynSuccess) goto done;epicsThreadSleep(.1);status = pasynOctetSyncIO->read(this->pasynUserScaler,statusString, maxStatusLen, timeout, statusLen, &eomReason);
// printf("In sendCommand read status: %d, statusString:%s\n", status, statusString);done:if (status != asynSuccess) {asynPrint(this->pasynUserSelf, ASYN_TRACE_ERROR,"%s:%s: writing command %s, error=%s\n",driverName, functionName, command, this->pasynUserScaler->errorMessage);}return(status);
}asynStatus Scaler974A::writeInt32(asynUser *pasynUser, epicsInt32 value)
{int function = pasynUser->reason;char response[256];size_t responseLen;asynStatus status = asynSuccess;static const char *functionName="writeInt32";setIntegerParam(function, value);if(function==this->scalerReset){this->sendCommand("STOP\r", response, sizeof(response), &responseLen);//printf("STOP:%s\n", response);this->sendCommand("CLEAR_ALL\r", response, sizeof(response), &responseLen);//printf("CLEAR_ALL:%s\n", response);asynPrint(pasynUser, ASYN_TRACE_FLOW, "%s:%s scalerReset\n",driverName, functionName);}else if(function==this->scalerArm){if(value !=0){/* Start counting */this->sendCommand("START\r", response, sizeof(response), &responseLen);
// printf("START:%s\n", response);setIntegerParam(scalerDone, 0);epicsEventSignal(this->eventId);}else{/* Stop counting */status = this->sendCommand("STOP\r", response, sizeof(response), &responseLen);
// printf("STOP:%s\n", response);setIntegerParam(scalerDone, 1);}asynPrint(pasynUser, ASYN_TRACE_FLOW, "%s:%s scalerArm=%d\n", driverName, functionName,value);}else if(function==this->scalerPreset){int m,n;char newstr[25];n=(int)log10(double(value));m=(int)(value/pow(10.0,n));sprintf(newstr, "SET_COUNT_PRESET %d,%d\r", m, n);this->sendCommand(newstr, response, sizeof(response), &responseLen);
// printf("SET_COUNT_PRESET:%s\n", response);asynPrint(pasynUser, ASYN_TRACE_FLOW, "%s;%s scalerPreset channel", driverName, functionName);}else{asynPrint(pasynUser,ASYN_TRACE_ERROR,"%s:%s got illegal function %d\n", driverName, functionName, function);}callParamCallbacks();return(status);
}asynStatus Scaler974A::readInt32Array(asynUser *pasynUser, epicsInt32 *value, size_t maxChannel, size_t *nIn)
{static const char *functionName="readInt32Array";int function = pasynUser->reason;int temp;int i;if (maxChannel > MAX_CHANNELS) maxChannel = MAX_CHANNELS;*nIn = maxChannel;if (function==scalerRead){for (i=0; i<(int)maxChannel; i++){getIntegerParam(i, scalerReadSingle, &temp);value[i] = temp;}asynPrint(pasynUser, ASYN_TRACEIO_DRIVER,"%s:%s: value=%d %d %d %d\n",driverName, functionName, value[0], value[1], value[2], value[3]);} else {asynPrint(pasynUser,ASYN_TRACE_ERROR,"%s:%s got illegal function %d\n", driverName, functionName, function);return(asynError);}return(asynSuccess);
}void Scaler974A::report(FILE *fp, int details)
{asynPortDriver::report(fp, details);
}void Scaler974A::eventThread()
{int done, presetCount;char response[100], statusString[256];size_t responseLen, statusLen;int counts[MAX_CHANNELS];int i;asynStatus status;static const char *functionName="eventThread";while(1){epicsEventMustWait(this->eventId);while(1){status = this->sendCommand("SHOW_COUNTS\r", statusString, sizeof(statusString), &statusLen);sscanf(statusString, "%d;%d;%d;%d;",&counts[0], &counts[1], &counts[2], &counts[3]);
// printf("%d;%d;%d;%d\n", counts[0],counts[1],counts[2],counts[3]);asynPrint(this->pasynUserSelf, ASYN_TRACEIO_DRIVER,"%s:%s status=%d, counts=%d %d %d %d\n",driverName, functionName, status, counts[0], counts[1], counts[2], counts[3]);this->lock();/* Get value of done in case scaler was stopped by scalerArm(0) */getIntegerParam(scalerDone, &done);getIntegerParam(scalerPreset, &presetCount);if (!done && (counts[0] >= presetCount)) done = 1;setIntegerParam(scalerDone, done);for (i=0; i<MAX_CHANNELS; i++) {setIntegerParam(i, scalerReadSingle, counts[i]);callParamCallbacks(i, i);}this->unlock();if (done) break;epicsThreadSleep(this->polltime/1000.0);}}
}extern "C" int initScaler974A(const char *portName, const char *serialPort, int serialAddr, int poll)
{new Scaler974A(portName, serialPort, serialAddr, poll);return(asynSuccess);
}/* iocsh function */
static const iocshArg initArg0 = {"Port Name", iocshArgString};
static const iocshArg initArg1 = {"IPPort", iocshArgString};
static const iocshArg initArg2 = {"Addr", iocshArgString};
static const iocshArg initArg3 = {"Poll", iocshArgInt};
static const iocshArg *const initArgs[] = {&initArg0,&initArg1,&initArg2,&initArg3};
static const iocshFuncDef initFuncDef = {"initScaler974A",4, initArgs};
static void initCallFunc(const iocshArgBuf *args)
{initScaler974A(args[0].sval, args[1].sval, args[2].ival, args[3].ival);
}void Scaler974ARegister(void)
{iocshRegister(&initFuncDef,initCallFunc);
}extern "C" {
epicsExportRegistrar(Scaler974ARegister);
}b) 添加一个dbd文件ortec974ASupport.dbd:
registrar(Scaler974ARegister)c) 修改同一目录下Makefile文件,指定编译中需要包含的库文件和源文件:
TOP=../..include $(TOP)/configure/CONFIG
#----------------------------------------
# ADD MACRO DEFINITIONS AFTER THIS LINE
#=============================#=============================
# Build the IOC applicationPROD_IOC = ortec974A
# ortec974A.dbd will be created and installed
DBD += ortec974A.dbd# ortec974A.dbd will be made up from these files:
ortec974A_DBD += base.dbd
ortec974A_DBD += ortec974ASupport.dbd# Include dbd files from all support applications:
#ortec974A_DBD += xxx.dbdortec974A_DBD += drvAsynIPPort.dbd
ortec974A_DBD += asyn.dbd
ortec974A_DBD += scalerSupport.dbd
ortec974A_DBD += calcSupport.dbd
ortec974A_DBD += asSupport.dbd# Include dbd files from all support applications:
#ortec974A_DBD += xxx.dbd# Add all the support libraries needed by this IOC
ortec974A_LIBS += asyn
ortec974A_LIBS += scaler
ortec974A_LIBS += calc
ortec974A_LIBS += autosave# Add all the support libraries needed by this IOC
#ortec974A_LIBS += xxxortec974A_SRCS += drvOrtec974A.cpp
# ortec974A_registerRecordDeviceDriver.cpp derives from ortec974A.dbd
ortec974A_SRCS += ortec974A_registerRecordDeviceDriver.cpp# Build the main IOC entry point on workstation OSs.
ortec974A_SRCS_DEFAULT += ortec974AMain.cpp
ortec974A_SRCS_vxWorks += -nil-# Add support from base/src/vxWorks if needed
#ortec974A_OBJS_vxWorks += $(EPICS_BASE_BIN)/vxComLibrary# Finally link to the EPICS Base libraries
ortec974A_LIBS += $(EPICS_BASE_IOC_LIBS)#===========================include $(TOP)/configure/RULES
#----------------------------------------
# ADD RULES AFTER THIS LINE5) 进入ortec974AApp/Db目录,编写一个用于自动保存的文件scaler4_settings.req:
$(P)$(S).TP
$(P)$(S).TP1
$(P)$(S).CONT
$(P)$(S).DLY1
$(P)$(S).RAT1
$(P)$(S).PREC
$(P)$(S).FREQ
$(P)$(S).RATE
$(P)$(S).DLY
$(P)$(S).COUT
file "scaler_channelN_settings.req", P=$(P), S=$(S), Ch=1
file "scaler_channelN_settings.req", P=$(P), S=$(S), Ch=2
file "scaler_channelN_settings.req", P=$(P), S=$(S), Ch=3
file "scaler_channelN_settings.req", P=$(P), S=$(S), Ch=4在同一目录下的Makefile中添加一行:DB += scaler4_settings.req
6) 退出到这个IOC的顶层目录,执行make进行程序编译。
7)进入到启动目录iocBoot/iocortec974A,创建两个目录:
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A/iocBoot/iocortec974A# mkdir -p req/ortec974A
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A/iocBoot/iocortec974A# mkdir -p autosave/ortec974A在req/ortec974A下编写一个用于自动保存的文件auto_settings.req,内容如下:
file scaler4_settings.req P=$(P) S=$(S)编写启动脚本:
#!../../bin/linux-aarch64/ortec974A#- You may have to change ortec974A to something else
#- everywhere it appears in this file< envPathscd "${TOP}"## Register all support components
dbLoadDatabase "dbd/ortec974A.dbd"
ortec974A_registerRecordDeviceDriver pdbbasedrvAsynIPPortConfigure("ortec974A", "192.168.3.30:4001", 0, 0 ,1)initScaler974A("tcportec974A","ortec974A",0,10)
dbLoadRecords("${SCALER}/db/scaler.db", "P=Ortec974A:,S=Scaler1,OUT=@asyn(tcportec974A 0 0),DTYP=Asyn Scaler,FREQ=10,TP=1,TP1=0.5,PR1=1,CONT=1")set_requestfile_path("$(TOP)/db")
set_requestfile_path("$(SCALER)/db")
set_requestfile_path("$(TOP)/iocBoot/$(IOC)/req/ortec974A")# 通过调用set_savefile_path函数指定你想要.sav文件被写到哪个目录中。
set_savefile_path("$(TOP)/iocBoot/$(IOC)/autosave/ortec974A")# 使用set_pass<N>_restoreFile()函数
# 指定哪些save文件要在记录初始化前(pass 0)前被恢复,以及哪些save文件在记录初始化后(pass 1)被恢复
set_pass1_restoreFile("auto_settings.sav")save_restoreSet_numSeqFiles(3)
save_restoreSet_SeqPeriodInSeconds(600)
save_restoreSet_RetrySeconds(60)
save_restoreSet_CAReconnect(1)
save_restoreSet_CallbackTimeout(-1)dbLoadRecords("$(ASYN)/db/asynRecord.db","P=Ortec974A:Scaler1:,R=Asyn,PORT=ortec974A,ADDR=0,IMAX=100,OMAX=100")cd "${TOP}/iocBoot/${IOC}"
iocInitcreate_monitor_set("auto_settings.req",5,"P=Ortec974A:,S=Scaler1")8) 用以上启动脚本启动这个IOC程序:
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A/iocBoot/iocortec974A# ../../bin/linux-aarch64/ortec974A st.cmd9)查看这个IOC加载的记录:
epics> dbl
Ortec974A:Scaler1:Asyn
Ortec974A:Scaler110) 用CSS编写操作客户端:
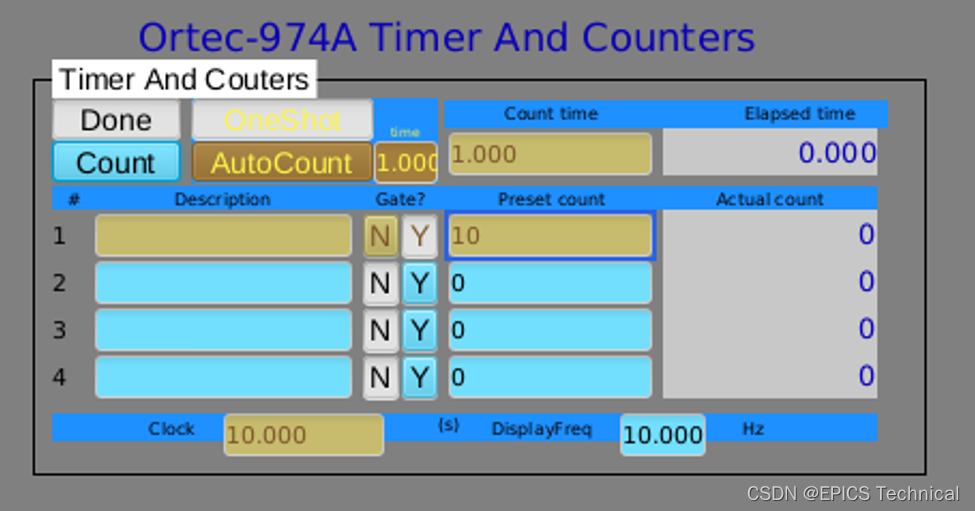 11) 在97A的3号输入端口接入一个3MHz的TTL信号,将计数时间设置为1.0秒,点击Count按钮,进行1秒钟计数:
11) 在97A的3号输入端口接入一个3MHz的TTL信号,将计数时间设置为1.0秒,点击Count按钮,进行1秒钟计数:
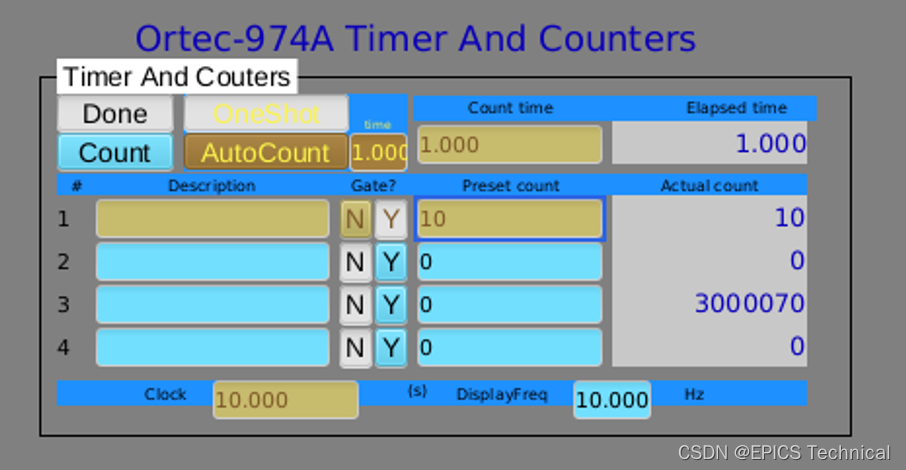
通道3能够读出计数器的正确计数值。
这篇关于Ortec974A EPICS IOC程序的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







