本文主要是介绍linux v3h平台开发系列详解(GMSL摄像头篇):1.3 两路GMSL相机,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、两路相机链路
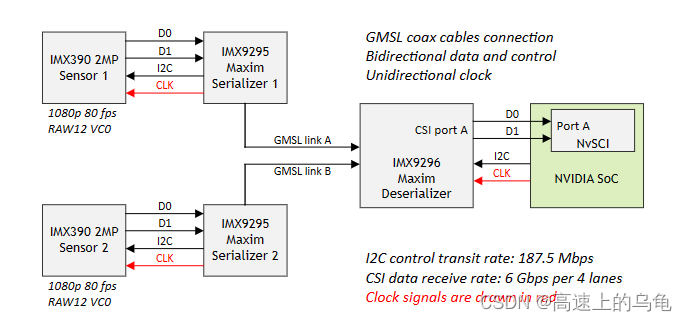
下图显示了 的控制、数据和时钟连接 参考GMSL模块在Jetson AGX Xavier系列上经过验证。
2、基本配置
- 在此 GMSL 设置中,两个传感器与其各自的串行器配对,每个传感器通过 x1080 CSI MIPI 通道流式传输 30p/12fps RAW2 像素
- 串行器通过不同的 GMLS 端口(端口 A 和 B)和使用同轴电缆的 GMSL 链路连接到 GMSL 解串器设备
-
在输出端口侧,解串器连接到所需 CSI 端口(本例中为端口 A)上的 Jetson AGX Xavier SoC。
-
为了将两个不同的像素流从两个传感器传输到共享 CSI 端口的接收器,解串器为每个流分配一个唯一的虚拟通道 ID。虚拟通道 ID 可通过设备树进行软件配置。它必须与 NVIDIA SoC 中接收器端编程的流的虚拟通道 ID 匹配。
这篇关于linux v3h平台开发系列详解(GMSL摄像头篇):1.3 两路GMSL相机的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





